基于Pro/E和ADAMS 的水下机器人设计方法研究❋
2013-09-04丑武胜郭晓旗
马 鑫,丑武胜,方 斌,郭晓旗
(北京航空航天大学 机械工程及自动化学院,北京 100191)
0 引言
ROV (Remotely Operated Vehicle)即遥控水下机器人,在水库堤坝检查、核电站检查作业等领域都得到了广泛的应用。现有的ROV由于要适应不同的使用要求,目前很难找到一个统一的设计方法。然而,ROV设计中总是存在一些共性的问题如浮力和重量的确定、稳定性设计等,这些问题的常规做法往往需要进行反复的计算试验才能最终确定,其过程繁复,工作量很大[1],而采用Pro/E与ADAMS结合来开发复杂机械,是当前比较实用的仿真方案[2-4]。本文提出一种基于Pro/E与ADAMS的ROV设计方法,运用其对ROV设计中的一些需要反复计算试验的问题(如平衡设计、稳定性设计等)进行简化和优化。
1 Pro/E与ADAMS联合仿真机制
Pro/E与ADAMS的联合仿真机制是通过两个软件之间的接口程序Mech/Pro实现的,其一般流程如图1所示,主要经过以下几个步骤:①在Pro/E环境下进行三维实体建模、模型装配和运动学分析;②利用Mech/Pro将模型生成为刚体,建立参照和简单约束与驱动力;③利用Mech/Pro将模型生成ADAMS可读取的模型数据的文件(.cmd),并将此文件导入ADAMS/View中,准备进行仿真分析;④在ADAMS环境下添加复杂约束、复杂载荷、函数和子过程等;⑤设置仿真参数进行仿真分析与结果处理。
2 联合仿真在ROV设计中的应用
2.1 ROV常规设计流程
ROV设计的一般程序是首先提出任务书,然后明确ROV的设计要求,并绘制草图和拟定总布置图,最后进一步计算出ROV的重量、排水量、浮性、稳定性、壳体强度及运动阻力,求出所需功率等;再根据草图和计算结果,将所有性能和结构逐步细化,最终完成工程图和相关设计文件。
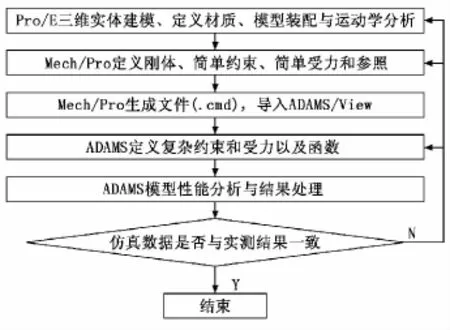
图1 Pro/E与ADAMS联合仿真流程图
2.2 ROV水下平衡设计
在ROV设计过程中,计算重量、排水量、浮性、稳定性等水下平衡设计内容贯穿整个ROV设计过程,是工作量较大的一个过程。一般的设计步骤如下:
(1)根据功能要求确定零部件,并进行合理的空间配置,尽量使ROV左右对称,前后质量和排水量均匀分布,尽量使重心和浮心靠近中线。
(2)整理零部件的重量、排水量表,设计浮力外形,使浮力略大于总体重量和负载量之和,且左右对称,并使ROV前后排水量分布均匀。
(3)确定配重块的重量,按照先调整左右平衡再调整前后平衡的顺序,布置浮力块使姿态角接近于零,再布置使俯仰角接近于零,尽量将配重块布置在ROV的下方,使得整体能够保持一定的稳心高度h。配置要求可以用式(1)~式(4)表示:

其中:W 为 ROV 总重量;V 为总排水量;(Xg,Yg,Zg)为 ROV 重心坐标值;(Xc,Yc,Zc)为 ROV 浮心坐标值(三轴方向如图2所示);h为ROV整体的稳心高度,即为重心和浮心的Z轴坐标差。
(4)布置推进器,使水平推力方向与ROV重心在同一水平面上,垂直推力方向与ROV重心在同一垂直面上。
2.3 联合仿真在ROV水下平衡设计中的应用
利用Pro/E与ADAMS的联合仿真方法可以简化ROV平衡设计中的反复计算,且使设计中的变动能够直观地在其性能上表现出来,使设计人员能够判断其是否满足设计准则,明确设计方向,具体步骤如下:
(1)在Pro/E环境下建立ROV三维实体模型(如图2所示)。各零部件的重量及排水量如表1所示。
(2)利用Mech/Pro接口的悬挂式菜单操作完成实体和约束的创建以及载荷的添加,同时根据各零部件的排水量加载浮力。仿真模型中需添加的约束和载荷如表2所示。

表1 各部件的重量和排水量

表2 约束和载荷表
(3)将模型导入ADAMS中,如图3所示,并利用参数化建模的方法将设计参数(如配重块的重量和位置、推进器的位置等)设为控制变量,进行平衡分析以及推进仿真。图4为经过配重块的重量和位置、推进器的位置调配后最终达到平衡的效果,可见ROV水下平衡姿态稳定性很好。图5为ROV经过调配后,进行推进仿真的姿态稳定性,可见推进仿真中姿态稳定性很好。

图2 ROV的三维实体模型及其主要组成

图3 ROV的ADAMS模型

图4 ROV平衡仿真三轴姿态角显示

图5 ROV推进仿真姿态角显示
(4)根据上述模型分析得出相应的调整方法,将ROV的配重块、推进器等做出调整,并用实验验证了ROV的平衡以及运动效果。图6为上位机显示的水下姿态传感器测量的ROV的三轴姿态,图7为ROV在水中的实际平衡效果。ROV入水后,滚转角和俯仰角偏差都在±0.5°内,证明其水平衡情况良好及该方法的有效性。

图6 上位机航姿显示
3 结论
本文将Pro/E和ADAMS的联合仿真方法成功地应用于ROV的平衡设计中,简化了ROV设计过程中的反复计算,使设计中的变动能够直观地在水下平衡的性能上表现出来,经过实验验证了该方法的有效性及其应用前景。
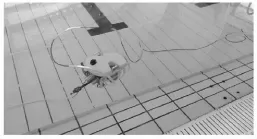
图7 ROV入水平衡效果
[1] 蒋新松,封锡盛,王棣堂.水下机器人[M].沈阳:辽宁科学技术出版社,2000.
[2] 姚晓光,郭晓松,冯永保,等.基于Pro/E和ADAMS联合仿真的夹钳机构设计与优化[J].机床与液压,2006(6):233-235.
[3] 李晓娟.Pro/E和 ADAMS联合建模方法研究[J].装备制造技术,2008(12):31-33.
[4] 杜芳,冯健翔,王建斌,等.基于Pro/E和ADAMS的喀吗哆机器人的建模与运动仿真[J].装备指挥技术学院学报,2008,19(1):81-84.
