高等工程教育中的机器人教育探索与实践
2013-09-03阎世梁肖晓萍王银玲熊开封
阎世梁, 张 华, 肖晓萍, 王银玲, 熊开封
(西南科技大学工程技术中心,四川绵阳621010)
0 引言
在强调工程教育“回归工程、服务社会”的背景下,如何培养高素质的,具有现代工程观的工程师是高等工程教育一个主要目标。在传统的工程实践教学中,实践类型单一,实践内容的枯燥,缺乏学科间的交叉融合等现实因素导致学生缺乏兴趣,实践效果不明显,极大地制约了学生综合应用能力的提升与创新意识的培养。因此,寻求具有吸引力的高度综合的实践教学载体是解决该问题的一种有效方式,实践表明,以智能机器人为载体的工程实践教学对提升学生的工程能力和创新意识具有明显的效果[1]。
智能机器人作为一个多学科交叉融合的综合载体,涵盖了电子信息、机械、计算机、材料、生物等诸多大类学科,应用范围几乎可以涉及到日常生活和军事应用的所有领域。正是因为智能机器人技术的高度综合与极其广泛的应用,以及机器人种类的繁多,我们也很难给其一个准确的定义。随着教育信息化与国际化程度的不断提升,机器人教育正在全球范围内积极开展,在高等教育中,以智能机器人技术为载体的教学实践与创新能力培养活动已经得到了广泛的认可,并逐步渗透到各个学科,在一些发达国家,机器人教育可以从幼儿园的启蒙阶段一直延续到高等教育阶段。在国外知名高校,如麻省理工学院(MIT)、卡耐基梅隆大学(CMU)、苏黎世联邦工学院(ETH)等在以智能机器人为载体的教学活动中探索机器人教育的关键技术和教育教学方法等方面都取得了明显的成效[2],并对机器人教育的可持续发展进行了探索[3],文献[4]对于在技术欠发达地区如何开展机器人教育进行了讨论。然而,如何有效地开展机器人教育并无定式,不同高校和不同学科都有各自的特殊性。本文首先对机器人教育中存在的问题进行了简要分析,进而以西南科技大学国家级工程训练中心机器人实验室为依托,对如何开展机器人教育进行了积极的探索与实践。
1 机器人教育渗透到多专业、多学科
目前,传统的观点过多的将机器人教育看作是理工科的“专利”,这极大地限制了机器人教育的开展,我们应当从机器人教育的工程思维观来思考机器人教育的开展。文献[5-7]分别从机械工程、计算机科学和轮式机器人运动控制的角度讨论了在具体学科、专业中机器人工程教育的开展,对于工科学生而言,以机器人为载体来强化知识和能力的综合运用的方式已得到广泛的实践和认可。
随着机器人教育内涵的不断延伸,我们认为仅仅局限于机械、电子信息、计算机等少数几个学科及其专业的机器人教育并不能很好的体现现代高等工程教育的“大工程”观[8],纵观近年来机器人技术的发展,机器人正在从工业环境逐步渗透到娱乐[9]、福利事业[10]、医疗辅助[11]等社会环境,文献[6]的统计表明,从1989~2009年,机器人技术在生物、感知方面的进步趋势正逐步超越计算机、机械和电子工程等传统优势学科,然而我国高校中在医学、能源工程、环境科学、生物工程等学科中却很少有机器人教育真正意义上开展,但我们已经看到这些学科正在与机器人技术产生紧密的联系。另一方面,我们认为所有专业的学生都可以从机器人感知和机器人文化的角度出发,对机器人在人类社会演进历程进行认知,了解机器人在当代军事、工业、农业、社会服务等范围内发挥的作用,分析和评价机器人技术和机器人文化的进步对人类社会和经济产生的影响,因此,如何用直观的展示方法和简单的动手操作来满足各层次、各专业学生的好奇心,增强学生工程素质,培养学生创新意识,提升对科学探索的求知欲是值得我们深入思考的。
因此,我们认为在现代工程教育的理念下,机器人教育应该通过多种方式渗透到各个学科中[12-13],并根据社会的进步和需求,在某些非机电类专业中进行加强,机器人教育不应仅仅看作是一个具体的专业实验载体,它应当为不同专业的学生进行协作创新提供一个良好交流平台。
2 机器人教育教学方式的多样化与体现学科前沿
近20年来,机器人技术的发展日新月异,各种传感器的应用,机械结构的改进,微处理器性能的提升以及算法的改进等都导致了机器人在智能化、适应性和多样性等方面产生了显著的进步。因此,大量丰富的信息需要多样化的教学方式加以体现,普通的单一实验装置已无法满足教学要求。
在实践教学中:①引导学生以微处理器为核心单元,辅以常用传感器,利用学校的机械加工设备构建移动移动机器人平台来完成特定功能的机器人制作过程是一个很好的教学方式;②目前模块化的机器人教学套件广泛采用,如慧鱼、Lego机器人,这类机器人教具便于学生发挥想象,体验乐趣,可以让不具有过多专业知识的学生通过一些简单的图形化编程操作来完成自己的作品,这两种方式目前在高校中针对不同层次的学生都有涉及。但我们需要注意的是,这些内容大部分还处于对学生基本能力的训练的层次,所涉及的内容也比较有限。例如,对于工业机器人轨迹规划,移动机器人定位导航、地图构建,仿生机器人,群集机器人等机器人学的前沿热点,一般情况下这些内容在本科生教学阶段仅个别专业能少有涉及,尽管这些内容还处于研究阶段,但这些反应学科前沿的内容完全有必要通过简单易行的方式让学生加以认识和学习,途径之一是利用软件仿真来可视化这些内容,通过改变参数观察不同的结果,能让学生对此有感性认识,有兴趣的学生可以通过与教师交流进一步学习,这对他们中的一部分今后走向科研道路是有帮助的;途径之二是让学生阅读文献,其中必须包括外文文献,然后写出自己的认识和疑惑,这种方式一方面锻炼了学生查阅文献的能力,同时也增强了学生自主学习和主动思考的能力。
除此之外,由于部分实验装置数量有限不利于大范围的学生操作,我们还可以通过演示实验,将教师或科研团队的研究成果制作视频加以展示等多种手段使学生了解机器人技术研究前沿,激发学生的对科学探索的求知欲,同时还可以吸纳有兴趣和潜力的学生加入科研团队进行更加深入的研究。
3 现代工程教育背景下的机器人教育与科技竞赛相结合
教学过程如何与学科竞赛、科技活动相结合已有大量文献进行过讨论,但需要指出的是,科技竞赛不应仅仅用技术指标作为衡量依据。现代高等工程教育要求融合人文科学和自然科学,以培养工程应用型人才为目标,着力培养学生的工程意识、工程素质以及工程实践能力。
我们提倡在机器人教育中用竞赛的形式来激发学生的实践热情和锻炼学生的实践能力[14],在现阶段意义下,我们所指的机器人或者是一个软件工程或者是一个软硬件的结合体,实际中机器人的形式大多以后者来体现。因此在现代工程教育观中,我们强调无论是课内还是课外的竞赛,学生制作的机器人作品除了预期的技术指标外,还必须要包括如下因素:意义和社会价值,团队协作与成员分工,成本预算与风险控制,工业设计构思,文档管理规范,作品效果自我评估,自我表达能力等。重要的一点是机器人教育与科技竞赛相结合的产物应当体现部分创新性,一味的重复和模仿,不思考,不发挥想象力,对于任何科技竞赛而言都是没有价值的。
机器人教育的目的之一就是借助机器人技术的发展动力来推进教育教学工作的优化和发展,开展科技竞赛的目的是提高学生的实践能力和工程素质,将机器人技术的发展动力和开展科技竞赛的活力有效结合,以创新能力的激发和现代工程素质的培养为目标,充分发挥现代工程教育背景下机器人教育的生命力。
4 开展机器人教育的探索与实践
机器人实验室依托我校国家级实验教学示范中心进行建设,实验室教师团队近年来对如何开展机器人教育进行了积极的探索与实践。在课程体系的设置方面,以“电子实训”、“金工实习”、“创新实践”、“科学技术史”、“工程技术概论”、“现代科学技术概论”为基础课程,在此基础上,我们开设了“机器人创意设计与实践”、“趣味单片机制作”、“陶艺制作与鉴赏”等多门素质类课程。
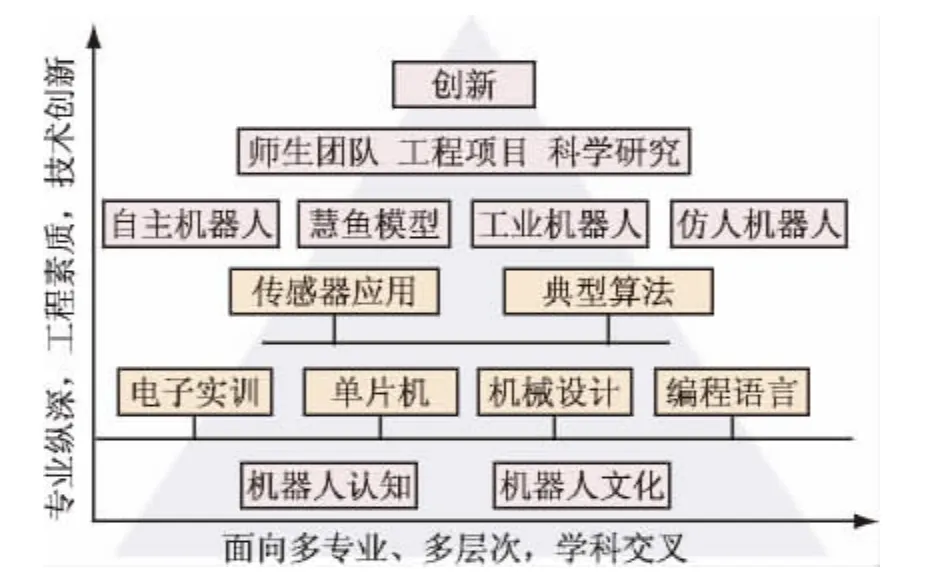
图1 课程层次结构简图

图2 实验室机器人教学设备
在“机器人综合设计与实践”课程中,如图1所示,我们综合考虑不同层次学生的需求,首先从机器人认知和机器人文化开始,通过多媒体的方式让学生们对机器人的种类、现实应用、前沿技术有一个总体的印象。接下来,我们以小组的形式指导学生完成一个二轮巡线机器人的制作过程,所有器件和材料和配件都从网上选购,车体面板采用5 mm有机玻璃,让学生根据各种车载电路板和电机支架开孔的尺寸要求用CAD作图,然后使用激光雕刻机切割外形轮廓并开孔开槽,单片机小系统来自“电子实训”课程的作品,巡线板作为标准模块预先制作完成,并通过热转印,液体腐蚀、丝网印刷、元器件贴装、再流焊一系列过程完成电机驱动部分的PCB制作,通过这样的一个实践过程极大的锻炼了学生的实践动手能力。另一方面,充分利用实验室现有的实验设备,如全向自主移动移动机器人,6自由度串、并联工业机器人,16自由度人形机器人和慧鱼组合模型来供学生学习和实践,见图2。
同时,我们选取一部分有代表性的技术做专题讲座,如为什么全向轮可以使机器人不需转向就可以朝任意方向运动,全景视觉在现实中的应用,为什么HSV颜色空间比RGB颜色空间更加有利于颜色识别,A*、D*算法与简单的机器人路径规划,串联机器人的正、逆运动学求解等主题,并且对每一个主题我们都通过软件来实现直观的可视化分析,如图3所示,这些 做法都增强学生对机器人技术的认知和理解能力。
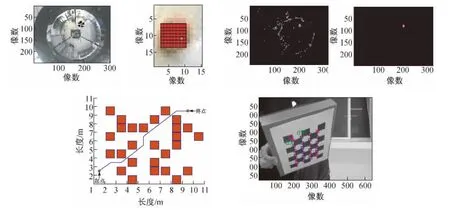
图3 机器人技术的可视化分析案例
在课程的教学之外,我们还组建了电子爱好者协会,进一步发掘了有强烈学习兴趣和潜质学生,学生可以通过申请加入“智能机器人创新实践班”,在这里他们将进一步学习和掌握机器人技术的相关知识,进而为师生共建科研团队,构建创新人才培养平台提供了必要条件[15]。近年来,我们培养的学生在全国电子涉及大赛、亚太机器人大赛、飞思卡尔杯全国大学生智能车竞赛等多项全国赛事中均取得了优异的成绩,学生的实践能力、工程素质和创新意识有了明显的提升。
同时,学生参与实际工程项目的热情被不断激发,Brokk机器人智能化改造,以及2009年河南杞县和广东番禺辐照装置卡源故障的成功排除,如图4所示,既是我校机器人教育在多学科之间交叉融合的成果,也是我校师生科研团队工程实践能力的集中体现,卓有成效地开创了师生共建、责任共担、双方共赢的新格局,拓展了工程素质教育的新途径。

图4 师生参与机器人实际工程项目案例
5 结语
如何有效地以机器人教育为载体,把握机器人技术进步的趋势,实现多学科之间的技术共享和协作创新,是机器人教育可持续发展重要因素,以现代高等工程教育的“大工程”观将机器人教育的本质和内涵科学地渗透到各学科专业,在提高实践能力的同时,如何有效激发学生的创新思维和协作能力,是高校开展机器人教育应重点思考之处。同时,机器人教育没有固定的模式,高校在开展机器人教育的同时,应结合自身特点和优势学科加以思考和利用,营造以学生为本的教学氛围,让学生在充满乐趣和成就感的氛围中体验科技创新所带来的愉悦感受。
我校近年来在落实培养“具有创新潜能和协作精神的高级应用型专门人才”的目标上,充分利用绵阳科技城的区域优势和优势学科,倡导“协同创新”机制,在如何将机器人教育与人才培养方面进行了积极有效的探索和实践,值此西南科技大学建校60周年之际,我们将以吴佑寿院士的题词“创业维艰寒暑六十,拼搏奋斗再谱华章”为激励,在培养高素质创新型工程科技人才方面将不断探索和总结。
[1] 董翠敏,刘永强.以机器人教育为平台培养大学生创新意识和能力[J].实验室研究与探索,2011,30(9):243-244.
[2] 王 益,张剑平.美国机器人教育的特点及其启示[J].现代教育技术,2007,17(11):108-112.
[3] Dias M B,Korsah G A.Thrishantha robotics,education,and sustainable development[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Barcelona,Spain:IEEE conference publications.2005:4248-4253.
[4] Dias M B,Browning B,Mills-Tettey G A,et al.Undergraduate robotics education in technologically underserved communities[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Roma,Italy:IEEE conference publications,2007:1387-1392.
[5] Masaaki K.Educating robot development in a university laboratory from first year-A trial of a robotics club under observation at a laboratory[J].Journal of Robotics and Mechatronics,2011,23(5):822-829.
[6] Birk A.What is robotics?An interdisciplinary field Is getting even more diverse[J].Robotics& Automation Magazine,2011,18(4):94-95.
[7] Dhaouadi R,Sleiman M A.Development of amodularmobile robot platform:Applications in motion-control education[J].IEEE Industrial Electronics Magazine,2011,5(4):35-45.
[8] 赵婷婷,买楠楠.基于大工程观的美国高等工程教育课程设置特点分析——麻省理工学院与斯坦福大学工学院的比较研究[J].高等教育研究,2004,25(6):94-101.
[9] Ishida T,Kuroki Y,Yamaguchi J,et al.Motion entertainment by a small humanoid robot based on OPEN-R[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Hawaii,USA:IEEE conference publications,2001:1079-1086.
[10] Sugahara Y,Lim H,Takanishi A,et al.Walking up and down stairs carrying a human by a biped locomotorwith parallelmechanism[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Hawaii,USA:IEEE conference publications,2005:3425-3430.
[11] Nakadate R,Solis A,Akanishi A,et al.Development of a robotic carotid blood measurement WTA-1RII:Mechanical improvement of gravity compensation mechanism and optimal Link position of the parallelmanipulator based on GA[C]//Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Singapore:IEEE conference publications, 2009:717-722.
[12] Maxwell B A,Meeden L A.Integrating robotics research with undergraduate education[J].IEEE Intelligent Systems Magazine,2000,15(6):22-27.
[13] Weinberg JB,Engel G L,Gu K,et al.A multidisciplinary model for using robotics in engineering education[C]//Proceedings of the American Society for Engineering Education Annual Conference and Exposition.Albuquerque,NM:ASEE publications,2001:2620.
[14] Verner IM,Ahlgren D J. Robot contest as a laboratory for experiential engineering education[J].Journal on Educational Resources in Computing,2004,4(2):1-15.
[15] 阎世梁,张 华,肖晓萍,等.师生共建科研团队,构建创新人才培养平台[J].实验室研究与探索,2009,28(3):8-11.
