基于LabVIEW的汽车巡航控制系统设计
2013-08-31仇成群
仇成群
(盐城师范学院物理科学与电子技术学院,江苏 盐城 224051)
巡航控制系统(cruise control system,缩写为CCS),又称为恒速行驶系统。驾驶员通过巡航控制开关设定某一个车速,在巡航控制期间,能够按存储在微电脑内的汽车燃料最佳经济性规律稳态行驶。汽车定速巡航控制系统自从20世纪60年代末、70年代初起,全球各大著名汽车厂家就竞相研制并将其装配在各自公司的高级轿车上,由于微电脑技术迅速发展,到21世纪初期,汽车巡航控制系统日趋成熟。汽车定速巡航控制系统通常采用多模块控制,成本相对昂贵。文中提出基于LabVIEW的汽车巡航控制系统,该巡航控制系统成本低,精度和稳定性高[1~5]。
1 模糊PID汽车巡航控制系统
1.1 传统PID控制在汽车巡航控制中的运用
CCS由信号输入装置、巡航控制电控单元和执行器等组成。汽车各种相关传感器和开关将信号送入CCS电控单元,电控单元由此计算发动机节气门开度,并控制执行器工作,自动调节发动机节气门开度。
PID控制为比例—积分—微分控制,其是根据汽车实际行驶车速与设定车速之间的偏差,参考过去、针对现在、预估将来等各种状况,实现系统不变参数的汽车巡航控制。控制器的积分控制把车速偏差累计起来通过加大控制量减小车速偏差,使行驶车速能够保持恒定稳定工作状态。控制器的微分控制起预估作用。当被控制对象的特性复杂、具有强非线性或者时变性时,常规PID控制参数在调整不适当时,会使控制系统振荡,造成工作状态不稳定,控制效果表现不佳,而难以实现有效控制[2~3]。
1.2 模糊控制器的设计
将巡航控制系统的速度误差绝对值|E|和速度误差变化率绝对值|EC|作为模糊控制器的输入语言变量。以它们变化范围来定义模糊集上的域论。
定义3个输出语言变量:
(1)Kp'为比例系数调校参数;
(2)Ti'为积分系数调校参数;
(3)Td'为微分系数调校参数。
模糊控制器有2个输入语言变量|E|和|EC|,3个输出语言变量Kp'、Ti'和Td',归纳出模糊控制规则表。
2 基于LabVIEW 的巡航控制系统
2.1 LabVIEW 简介
LabVIEW由美国NI公司出品,是一个功能强大而又灵活的仪器和分析软件应用开发工具。设计人员可以在LabVIEW 中采用多种途径生成和编辑模糊推理系统,以命令行函数来实现控制系统功能[3]。
2.2 基于LabVIEW 的巡航控制系统
将隶属函数与参数调节规则输入模糊逻辑工具箱中,完成模糊控制器的设计,得到PID参数模糊矩阵表[2~5]。当控制系统运行时,对模糊规则结果进行数据处理,然后完成对PID参数的调校。得出比例—积分—微分系数调校参数(Kp'、Ti'、Td')的控制表。将模糊控制与PID控制有效地结合起来建立模糊PID控制系统。
3 仿真实验
实验计算机配置为:Intel(R)Core(TM)2 Duo CPU T6670@2.20GHZ,2.00GB的内存,500G硬盘,操作系统为Window7;环境编程为LABVIEW2010正式版。实验参数如下:
(1)仿真观察时间:2012/5/10 09:00:00~12:00:00。
(2)仿真系统主界面可分为车辆基本信息模块,环境状态检测模块和系统仿真结果模块。
(3)仿真过程中通过Kp,Ti,Td 参数调节获得PID参数,使输出阶跃响应达到预期效果,再输入巡航车速,点击开始按钮进行仿真。根据牛顿第二定律,汽车的运动方程为:

式中,
Fa为加速阻力,N;
Fe为驱动力,N;
Ff为行驶阻力,N;
Fw为空气阻力,N;
Fh为坡度阻力,N;
δ 为计入旋转质量惯性力偶矩后的汽车质量转换系数;
m 为汽车质量,kg;
a 为加速度,N/kg。
取汽车质量m=1 500 kg;道路坡度α =0;传动系统效率η=0.90%;空气阻力系数Cd=0.30;路面摩擦系数μ=0.40;车速;发动机最大输入转矩Ttq=250 N·m;最大功率转数n=4 500 rpm;前后轮规格215/60R16。
根据文献[5]计算汽车的运动方程。在LabVIEW环境下,要先建立汽车动力系统模型,然后再建立模糊PID控制器系统模型,再将汽车动力系统模型和模糊PID控制器系统模型通过运算结合得到汽车巡航系统控制模型[3~5]。
在LabVIEW 中建立汽车巡航控制仿真测试系统如图1所示。对车速为80 km/h时的模糊PID与传统PID控制曲线进行仿真对比,从仿真数据可以得到模糊PID控制曲线的响应时间快于传统PID控制曲线的响应时间,而且超调量也小,其稳定性明显好于传统PID控制。
通过仿真试验控制结果表明:基于LabVIEW的控制系统能够对PID控制参数进行实时调整,通过调校参数Kp'、Ti'、Td'将汽车巡航车速控制在设定的车速值偏差范围内,系统超调量小,实现了巡航控制稳定性的要求。通过仿真得到当采用基于LabVIEW的汽车巡航控制系统的控制超调量小,响应速度快,控制系统具有良好的稳定性。
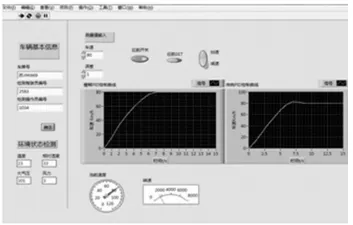
图1 汽车巡航控制仿真测试系统
4 结束语
文中对汽车巡航控制算法进行了研究,设计的基于LabVIEW 的汽车巡航控制系统,可以显著改善巡航控制系统的控制品质,并且系统成在2 000元人民币左右,成本相对较低。系统超调量小,稳定时间快,实现了驾驶员对于稳定性的要求,控制效果良好,可以较好地满足汽车巡航需求,设计系统具有较好的市场应用价值。
[1]Kocaarslan I,Cam E.Experimental modeling and simulation with adaptive controlofa power plant[J].Energy Conversion and Management,2007,48(3):787-796.
[2]Leng G,Thomas M G,Girijesh P.An approach for on-line extraction of fuzzy rules using a self-organizing fuzzy neural network[J].Fuzzy Setsand Systems,2005,150(2):211-243.
[3]王立新,王迎军.模糊系统和模糊控制[M].北京:清华大学出版社,2003.
[4]仇成群,刘成林,沈法华,等.基于MATLAB和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012,28(6):197-202.
[5]余志生.汽车理论[M].北京:机械工业出版社,2009.