基于传递对准技术的舰船基准一体化方案研究*
2013-08-29孙睿智
向 前 孙睿智 杨 斌
(海军驻武汉七〇一所军事代表室 武汉 430064)
1 引言
随着舰载雷达、导弹、火炮、直升机等装备对感知距离和打击精度要求的不断提高,对精确的姿态基准需求也不断增大。目前由装备自带局部基准提供姿态信息的方式虽可满足装备自身需求,但增加了对舰总体资源的消耗,不利于全舰集成优化,同时由于各局部基准精度的差异及船体动态变形的影响,制约了全舰统一基准的精度,影响对目标感知和武器打击精度的匹配。
为了建立以主惯导为中心的全舰统一基准,需要实时测量主惯导与舰载装备处的船体变形,虽然工程上已提出了光管法、摄影对准、应变仪测量等方法,但仍存在使用限制条件较多,保障难度较大或者精度不足等问题[1]。
传递对准技术是指利用已对准好的主惯导系统导航参数如位置、速度、姿态角与子惯导(局部基准)相应导航参数进行匹配,估计出子惯导相对主惯导的姿态失准角,建立子惯导数学平台并对其导航参数进行初始化的过程。其优点是可以充分发挥主惯导精度高的优势,加快子惯导的初始对准速度,提高对准精度。其优点是无需额外的对准设备,适装性较好,能够实时得到测量点结构变形,并可达到较高的精度。因此,传递对准技术在国外机载武器上已得到广泛应用,如美国的“哈姆”空地反辐射导弹、“捕鲸叉”空舰导弹、英国的“海鹰”空舰导弹、德国与挪威联合研制的“企鹅”空舰导弹等都应用了该技术[2]。
本文分析了舰载设备局部基准对准需考虑的因素及面临的问题,并提出了基于传递对准技术的全舰基准一体化初步方案。
2 对准技术发展现状
2.1 常用的传递对准技术体制
舰艇-武器惯导对准本质上属于动基座传递对准,其原理图如下:
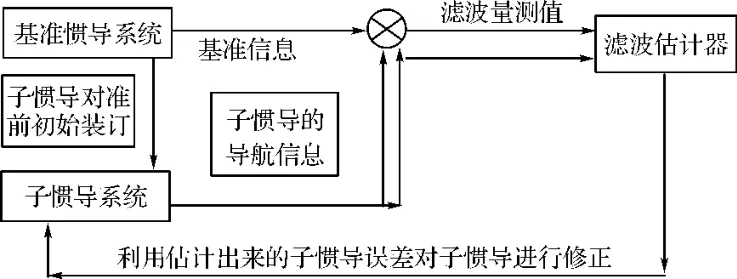
图1 动基座传递对准技术原理
按照量测量的获取来源,动基座传递对准滤波估计主要包括计算参数匹配、测量参数匹配以及混合参数匹配等模式,主要包括积分量匹配、位置匹配、速度匹配、加速度匹配、角速度匹配、速度+加速度匹配、速度+姿态匹配、速度+角速度匹配等。
2.2 影响舰载装备传递对准精度的主要因素
2.2.1 挠曲变形
由于船体并非刚体,在不同载荷、海浪撞击及温度效应等复杂因素的作用下,船体结构会发生弹性变形,加上设备安装导致子惯导各轴与主惯导各轴之间存在的固定角度误差,综合起来主惯导和子惯导之间的船体结构挠曲变形的峰值可达到1°左右[1]。此外,来自水下的冲击(如深水炸弹)或战斗损伤也会引起的舰船结构的严重变形。
船体结构挠曲变形对采用角运动参量的匹配方法影响较大,必须进行估计和补偿,可采用的方法有理论建模法和近似数学模型法。前者需要建立主惯导与局部基准间精确的结构模型,受制于平台载体、环境的变化以及计算能力,这类方法的精度和实时性难以令人满意[3];后者多将结构挠曲变形视为Markov过程进行建模[4~5],但作为一种近似方法,建模误差将引入对准精度。
2.2.2 时延和杆臂效应
传递对准需要主、子惯导之间量测数据和估计数据的交互,由于二者位置不同必然存在时延。为了补偿这一误差,应当建立时间统一系统,对二者输出的惯性量测数据进行精确标定和同步,并在算法中进行相应的修正[6]。
杆臂效应是指载体进行角运动时,由于主、子惯导之间位置不同导致二者感测到的加速度和速度不同的现象,这部分误差也必须在算法中建立模型消除其影响[7]。
2.2.3 舰船主惯导工作模式影响
舰船主惯导虽然精度较高,但其主要是设计为保障航行需求的。为了满足长时间工作的需要,主惯导系统一般会采用计程仪阻尼,卫星组合导航等来提高长时间导航精度,而组合导航模式下主惯导系统导航结果易受计程仪信息、卫星信息的影响。往往存在因状态切换,误差修正等原因造成的主惯导误差传递规律变化,如数据跳变,短时无输出等异常[11],对传递对准性能造成一定影响。
2.3 几种传递对准匹配模式比较
位置匹配模式是最基本的计算参数匹配模式。主要特点是主子惯导系统之间的杆臂效应误差补偿算法简单,对主子惯导系统之间的挠曲变形不敏感,对主基准信息的时间同步性要求较低,工程上较易实现。位置匹配模式传统上主要适用于载体航向机动便利且具有充分准备时间的高精度惯导系统,对快速反应能力要求较高的武器系统一般不采取位置匹配方式。
速度匹配模式是目前使用较多的计算参数匹配模式,其原理与位置匹配模式相同,主要优点是对主子惯导系统之间的挠曲变形不敏感,对主基准信息的时间同步性要求较高,工程实现所需的保障措施较少;缺点是对准时间稍长,且杆臂效应对对准的影响较大,主子惯导之间的杆臂误差必须精确到分米级。
加速度匹配模式主要适用于主子惯导均为捷联式惯导系统的情况,原理上相当于在速度匹配模式中加入了一个微分环节,因此其对准所需时间较短,且通过载体的有效机动,还可估计出子惯导系统的方位失准角。但由于加速度信息属于快变信息,对实时性要求较高,受载体挠曲加速度影响较大,要求载体机动,工程实现较困难。
角速度匹配模式是利用载体系内的角速度矢量进行匹配滤波的模式,其特点是对准模型简单,计算量很小,无需特殊机动即可在很短时间内取得较高的对准精度,是一种较有前途的对准算法。但要在工程上实际应用,还需要解决基准信息的实时性、主/子惯导陀螺漂移耦合及克服对载体挠曲变形影响敏感等问题。
为了发挥各种传递对准匹配模式的优点,弥补其不足,实际中常使用各传递对准匹配模式进行组合工作[8],如速度+姿态[9],速度+角速度等匹配模式。
3 基于传递对准技术的舰船基准一体化初步方案
3.1 舰载装备传递对准需求及特点
舰载雷达、导弹、火炮和直升机是姿态信息的主要用户,一般而言火炮直接由自带局部基准提供实时姿态信息,其局部基准在使用前需要先进行自对准;雷达、导弹和直升机通常在临近位置设置一台或多台局部基准,使用前局部基准首先与舰船主惯导进行对准,再采用直接传递对准的方式将局部基准与装备内置惯导进行对准。由于各自带局部基准精度上的差异及船体变形的影响,造成舰载各装备实际使用的姿态基准参考坐标系互不统一,对全舰目标探测指示与火力打击精度的匹配造成了不利影响。
通过对舰载装备的任务剖面、工作模式、使用流程的分析可以发现,与传递对准技术最初的应用对象机载导弹相比,舰载装备在对准技术的使用上有如下一些特点:一是对于对准时间的敏感性相对较低;二是由于舰船远洋航行时间越来越长,对局部基准长时间工作的可靠性和功耗要求较高;三是由于全舰局部基准数量较多,需要充分考虑保障与维护维修要求。因此,舰载装备应综合考虑自身的需求选择合适的传递对准技术体制。
3.2 方案思路
从上文对不同对准算法的分析可以看出,对准要求时间和平台机动方式是影响舰艇平台与舰载装备惯导传递对准工程应用的两个重要因素。根据3.1节对舰载装备传递对准需求及特点的分析,若局部基准与所服务的舰载装备在运行上相互独立,则一方面可选择适当时机如舰船战斗准备期间开始进行主惯导与对局部基准对准以保证足够的对准时间,从而降低对准对舰船机动的需求;另一方面,考虑到现有的光纤捷联惯导已可以做到一次对准完成后,数十分钟内连续保持可用状态。因此,只要局部基准的功耗和可靠性满足一定的要求,可设计局部基准对准完成以后进入待机状态,并与主惯导之间定时进行对准以保持输出信息的精度,采用这种方式的好处在于基本可忽略算法对对准时间的要求,也可减轻对于计算量的要求。
综上所述,基于传递对准技术的舰船基准一体化思路为:综合考虑舰载装备使用特点,任务需求,平台机动情况,船体变形,杆臂效应和时延等因素,合理选择对准算法和局部基准惯性器件,使局部基准运行独立于所服务的舰载装备,并与主惯导进行常态化的对准。充分发挥主惯导高精度和高可靠性优势,优化基准资源配置,尽可能地降低舰载装备传递对准技术工程实现所需的保障要求,实现全舰基准一体化和局部基准技术体制的统一,提高全系统的精度和可靠性,减少全寿命期维护维修费用。
3.3 对准网络结构设计
根据3.2节提出的方案思路,考虑实时修正误差角的计算要求,可采用反射内存等高速总线将各局部基准和主惯导系统连接起来,定时通过同步采集电路进行数据同步处理并加上时间信息。各局部基准利用接收到的主惯导信息对自身的姿态角误差进行估计,并利用估计值修正其姿态矩阵,在非对准期间,系统进入待机状态。
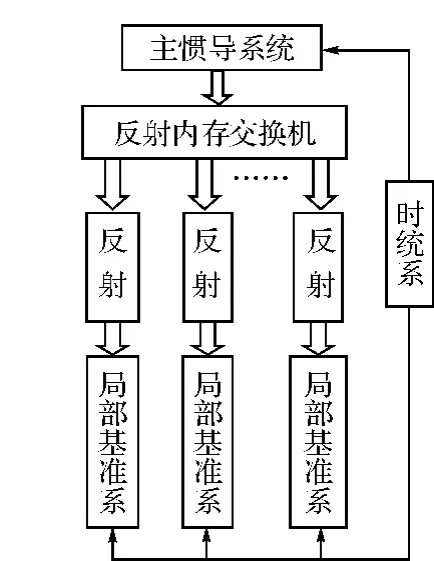
图2 对准网络结构图
3.4 对准算法选择分析
根据3.2节提出的方案思路,可考虑选择速度匹配、积分速度匹配法等对准时间虽然要求稍长,但工程可实现性较好的算法。以积分速度匹配传递对准方法为例,该方法使用舰艇和舰载设备惯导传感器的速度测量值进行积分,以积分后的数值作为匹配观测量对舰艇和舰载装备惯导坐标系的失调角进行预先估算和消除。即定义状态向量为积分速度差:

系统状态选为

状态矩阵为
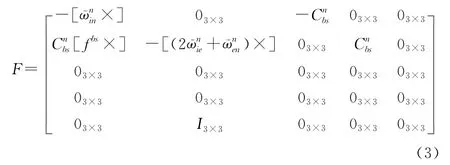
积分速度匹配量测矩阵为

式中Φn为子惯导的误差角,δVn为速度误差,为陀螺仪漂移为加速度计零偏差。为子惯导载体坐标系到导航坐标系的计算方向余弦矩阵。
根据李双喜等人的研究[10],采用积分速度匹配算法的弹载惯导,与主惯导的误差角可在70s内由10ramd 降到0.2mrad。与常用的速度+姿态匹配法相比,速度积分量匹配具有如下优点:1)对挠曲变形和振动敏感度大大降低;2)对准滤波器可采用更低的更新率;3)采用的杆臂效应补偿较容易且对时延误差不敏感;4)实现对失准角有效估计的机动方式为匀速运动与S 转弯结合,对平台要求较低。不足之处主要是对准时间较长,适合于应用在对准精度高,平台变形大的场合,是舰载装备的传递对准应用比较适宜的算法。
3.5 局部基准惯性测量器件选择分析
局部基准可选择的惯性器件取决于舰载装备对于基准信息的需求和采用的对准算法。如美国的JADM 卫星精确制导炸弹采用了速度积分匹配对准算法,选择的低成本GG1308激光陀螺为漂移率为1(°)/h[14]。本节从装备需求、器件精度、可靠性、功耗、成本等几个方面对本文的全舰基准统一方案可选用的局部基准惯性器件进行了分析和评估。
局部基准的核心元件是陀螺仪,目前常见的几类陀螺仪的精度范围如图2所示描述:
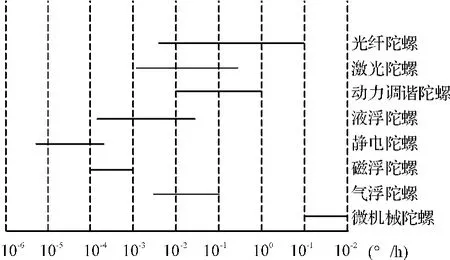
图3 常见陀螺精度级别
在中等精度陀螺仪中,光纤陀螺已比较成熟并具有如下突出优点:1)无活动部件,体积小,结构简单,耐冲击;2)启动时间短,仅需零点几秒即可工作;动态范围宽,测量范围在0.01(°/h)~400(°/s);3)可靠性高。美、英、法、德等国均已研制出实用的光纤陀螺型号并已广泛用于飞机、潜艇及导弹的导航和制导。
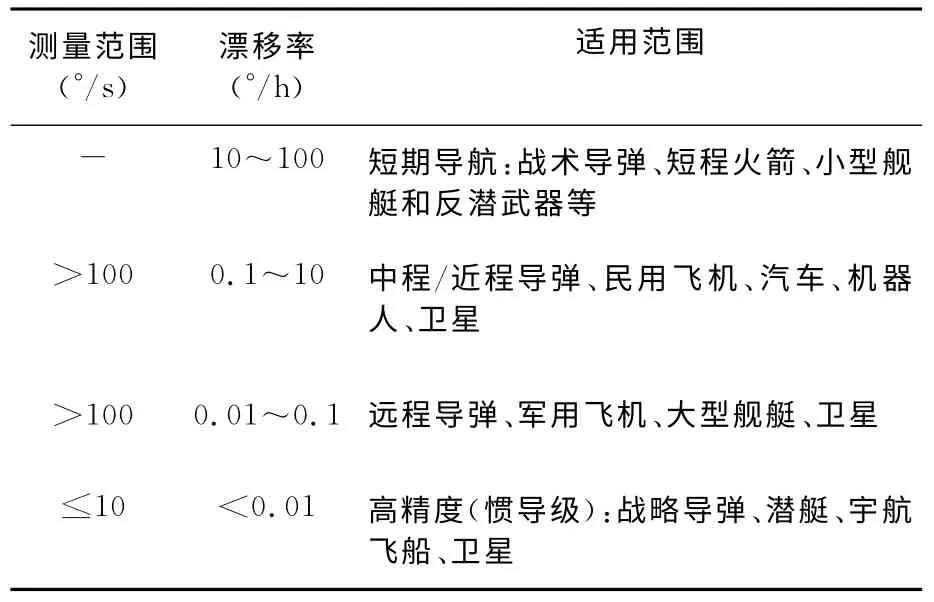
表1 不同精度光纤陀螺在不同领域的应用
因此,对于远程导弹对准而言,可选择以光纤或激光陀螺仪为核心部件的局部基准。
对于对准精度要求较低,工作条件恶劣的应用场合,另一种可采用的陀螺仪是基于MEMS(micro electromechanical systems)技术的微固态惯性器件。微固态惯性器件是利用化学蚀刻方法在单晶硅片上制成的的一种超小型测角仪器,具有尺寸小,重量轻,功耗低,启动快,抗冲击,能适用于较恶劣的环境条件等优点,可大批量生产,成本极低,不足之处是精度仍较低。目前国内已有相关单位对以微机械惯性测量单元作为子惯导进行传递对准的技术进行了研究[12~13],结果表明对于特定的应用,该技术方案可以满足指标要求,可有效地降低全系统重量、体积及功耗。表2列出了两种微机械陀螺的部分参数。
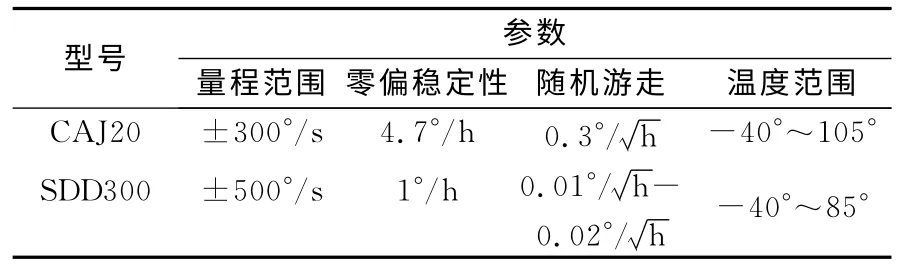
表2 两型微机械陀螺部分参数
随着技术的进步和微机械陀螺的精度的不断提升,以其为核心器件的舰载装备局部基准将具有独特的优势和应用潜力。
4 结语
本文概述了传递对准技术进展情况,分析了舰载装备进行传递对准的需求和特点,即对于对准时间的相对不敏感性、工作的长时间性和全寿命期维护的要求。在此基础上提出了运用传递对准算法进行全舰基准一体化方案的初步思路,并针对不同的对准需求研究了可选的对准算法和局部基准核心惯性测量器件。初步分析表明,合理的选择对准算法和局部基准精度等级,可满足全舰基准一体化的要求,并提升全舰基准系统的精度、可靠性和集成优化的水平。下一步工作将针对提出的方案开展试验研究。
[1]汪顺亭,汪湛清,朱昀炤,等.船体变形的监测方法及其对航向姿态信息的修正[J].中国惯性技术学报,2007,15(6):635-641.
[2]何昆鹏.捷联惯导系统姿态角快速对准技术研究[D].哈尔滨:哈尔滨工程大学,2004.
[3]郑荣才,陈超英,杨功流.舰船甲板变形的理论研究[J].舰船科学技术,2006,28(4):18-21.
[4]Mochalov A C,Kazantsev A V.Use of the ring laser units for measurement of the moving object deformation[J].Proceedings of SPIE,2002,4680:85-92
[5]李家齐,吴新建.船体变形及其对舰载红外警戒系统测角的影响[J].舰船电子工程,2007,27(2):86-88.
[6]徐林,李世玲,屈新芬.三种传递对准延时误差补偿方法的比较研究[J].兵工自动化,2011,30(2):22-25.
[7]甘帅.速度匹配传递对准的杆臂效应补偿研究[D].哈尔滨:哈尔滨工程大学,2009:19-43.
[8]戴邵武,张玉彤,路燕.三种传递对准方法的对比研究[J].海军航空工程学院学报,2008,23(2):161-164.
[9]Shortelle K J,Graham W R.F-16flight tests of a rapid transfer alignment procedure[C].Proceedings of the IEEE position Location and Navigation Symposium,1998:379-386.
[10]李双喜,高晓颖,韩利军.“速度积分”匹配传递对准方法研究[J].航天控制,2010,28(1):58-63.
[11]付梦印,郑辛,邓志红,等.传递对准理论与应用[M].北京:科学出版社,2012:155-183.
[12]刘昇,卢广山,张晓鸿,等.一种用于光电平台的传递对准方案设计[J].弹舰与制导学报,2011,31(5):47-50.
[13]卢道华,张竞.船舶MEMS微惯导网络精度技术研究[J].舰船电子工程,2012,32(1):38-40.
[14]Klots H A,Derbak C B Jr.GPS-Aided Navigation and Unaided Navigation on the Joint Direct Attack Munition[C]//Position Location and Navigation Symposium,IEEE 1998:412-419 .