基于神经网络的旋转机械运行状态预测
2013-08-28王小乐玄兆燕
王小乐,玄兆燕
(河北联合大学机械工程学院,河北唐山 063009)
0 引言
在机械状态监测和故障诊断的实践中,除了需要确定当前机器的行为是否正常,以及导致异样信号的原因,还对大型机械的运行状态趋势进行预测,也就是能否根据机器当前以及以往的状态来预估机器在将来的一段时间内的运行状态。目前,机械运行状态变化的趋势分析和预测预报是诊断技术的重要目标之一[1]。
旋转机械典型故障最主要的是转子不平衡,其次是转子不对中,再次是机件松动、轴承损坏等其它故障[2]。随着不同故障的发生以及故障的程度加剧,振动信号的振动烈度也在不断的增大。因此,以振动烈度作为故障的检测标准实用性强。
人工神经网络是一种模拟人类脑神经系统的网络结构,它能从已知的数据中自动地归纳规则,获得这些数据的内在规律及样本中蕴含的非线性关系,具有良好的自适应性、自组织及很强的学习、联想、容错和抗干扰能力[3]。神经网络具有通过学习逼近任意非线性映射的能力,将神经网络应用于非线性系统的建模与辨识中,可以不受非线性模型的限制,便于给出工程上易于实现的学习算法[4]。
本文以振动烈度作为状态预测的原始数据,基于MATLAB的神经网络工具箱风机运行趋势进行预测。通过实际数据对预测数据进行对比验证。
1 BP神经网络
1974年,P.Werbos在其博士论文中提出了第一个适合多层网络的学习算法,但该算法并未受到足够重视和广泛的应用。直到20世纪80年代中期,David Runelhart,Geoffrey Hinton和Ronald Williams,David Parkr,以及Yannn Le Cun分别独立发现了BP算法。1986年,美国加利福尼亚的PDP(parallel distributed procession)小组发表了《Parallel Distributed Processing》一书,将该算法应用于神经网络的研究,才使之称为迄今为止最著名的多层网络学习算法——BP算法。由此算法训练的神经网络,称之为BP神经网络。
人工神经网络中最常用是BP网络(多层前馈网络),它采用的是误差反向传播算法,BP神经网络一般由输入层,隐含层以及输出层组成:每一层都由若干个节点组成,每一个节点表示一个神经元,上层节点与下层节点之间通过权来连接,层与层之间的节点采用全互联的连接方式,每层内节点之间没有任何联系。(如图1所示)。
BP神经网络算法的基本思想是:学习的过程是由信号的正向传播与误差的反向传播组成。正向传播时,输入的样本从输入层传入,经过隐层逐层处理后传向输出层。若输出层的实际输出与期望输出不符,则转入误差反向传播阶段。误差反传的基本思想是将输出的误差以某种形式通过隐层向输入层逐层反传,并将误差分摊给各层单元,从而获得各层单元的误差信号,此误差信号即可以作为修正各单元权值的依据。这种信号正向传播与误差反向传播各层权值调整的过程是周而复始地进行的。其中权值在不断调整的过程也是网络的学习训练的过程,此过程一直进行到网络输出的误差减小到可接受的程度,或进行到预先设定的学习次数为止[5]。

图1 三层BP网络拓扑结构
2 风机故障趋势预测
2.1 数据处理
本论文数据来源于试验台,给转轴设置不同的偏心配重来仿真现场的转轴不平衡。共采集12组振动速度信号,设置的转轴转速为1 600 r/min,采样频率设为512 Hz。将采集到的振动速度进行处理,分别提取振动信号的振动烈度值,依次为:1.77 4.02 5.651 7.581 9.803 11.502 15.117 17.804 19.309 21.0345 22.96 24.457(mm/s)。
在运用神经网络对数据进行训练和预测过程中,神经元中的激活函数是有界的,为了使比较大的输入满足激活函数的大梯度范围,降低甚至消除神经元的过饱和状态,在运用神经网络处理数据时,要对数据进行归一化处理,将来源的数据处理为[0,1]之间。具体的公式为

处理结果为 0 0.095 0.163845 0.245324 0.339131 0.410858 0.563474 0.33778 0.740448 0.813294 0.894584 1 mm/s
2.2 建立神经网络预测模型
神经网络的中间层数和神经元的数量是神经网络模型设计的关键。
(1)神经网络中间层数的确定
BP网络的中间隐含层数对训练速度有很大的提升,但在实际的操作时,隐层数量太多会占用大量的训练时间,况且还有一种提高训练速度的方法是增加隐层节点数,所以在实际应用时,训练数据不是很多,选取的隐含层数为三层。
(2)BP神经网络各层中神经元个数的确定
神经元个数的确定是神经网络模型设计的关键,网络容错性和迭代次数与网络中的神经元个数密切相关。神经元个数太多会延长网络训练时间,增加训练的迭代次数,网络的泛化能力大幅度下降,导致预测误差增加。网络的神经元个数太少,网络的容错性降低,甚至网络训练无法进行。在对预测模型进行设计时,先由经验公式初步确定神经元的个数,再将不同神经元的训练模型对比,择优选用。神经网络神经元确定的经验公式为:i=n+m+a其中n为输入层神经元的个数,i为网络隐含层的神经元的个数,m为输出层神经元的个数,a为大于1且小于10的常数,因此可以确定本实验的神经网络模型的隐含层神经元的个数为3~5个。
2.3 BP神经网络预测的MATLAB实现
本文的振动烈度数据分为训练集和测试集两部分,以
[0 0.095 0.163845147 0.24532444 0.339131169 0.410858277 0.563473635 0.337780217 0.740448347]振动烈度为训练数据,
[0.163845147 0.24532444 0.339131169 0.410858277 0.563473635 0.337780217 0.740448347 0.813294212 0.894583527]为目标输出训练。
[0.095 0.163845147 0.24532444 0.339131169 0.410858277 0.563473635 0.337780217 0.740448347 0.813294212]作为测试输入,
[0.2453244 0.339131169 0.410858277 0.563473635 0.337780217 0.740448347 0.813294212 0.894583527 1]作为测试输出。
根据处理后的数据范围,本文选取tansig和logsig作为激活函数。设定网络的最大学习迭代次数为1000次。设定网络的学习精度为0.0145。
实验的训练情况以三个神经元为例如图2所示。可以看到训练仅用了815次就达到了期望的目标,训练速度很快。
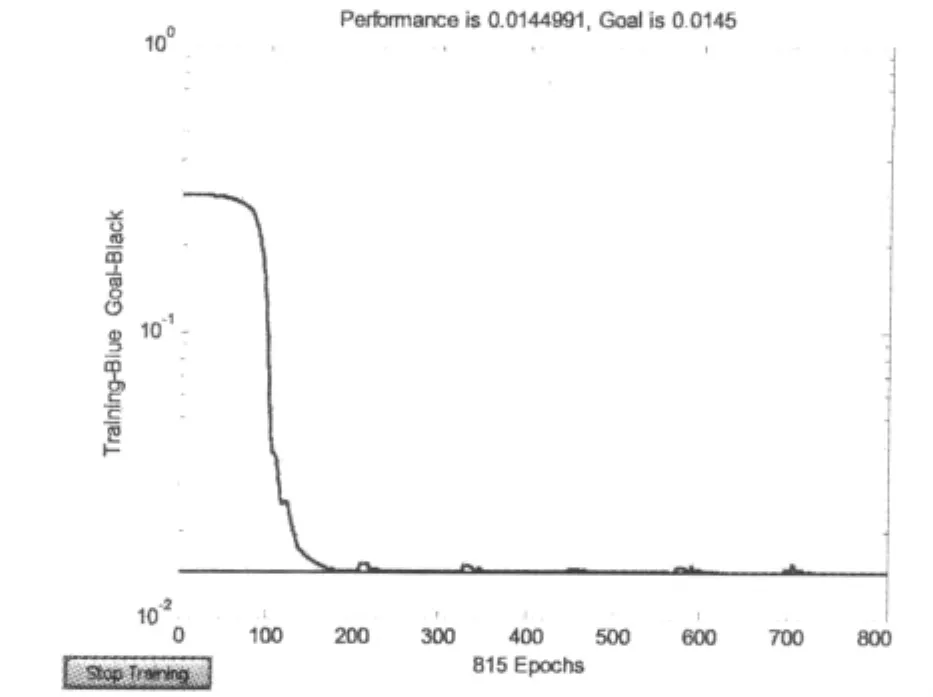
图2 神经网络训练
本文分别以三至五个神经元进行训练及预测,误差曲线如图3所示
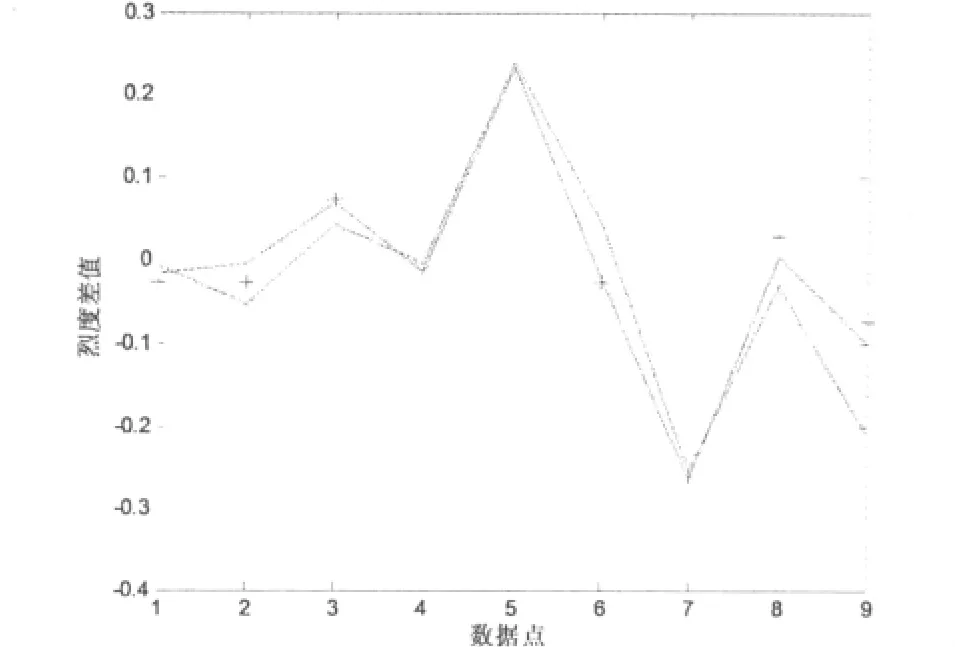
图3 预测误差曲线
此图为不同中间层神经元个数的预测值与实际值得误差曲线。直线代表中间层神经元个数为3,’+’中间层神经元个数为4,点划线’——’代表中间层神经元个数为5。以三个神经元为例,预测结果为0.2281 0.3357 0.4801 0.5497 0.5718 0.7179 0.5491 0.8997 0.9073 mm/s,不同神经元预测结果与期望结果如表1~3所示。

表1 三个神经元预测结果比较表
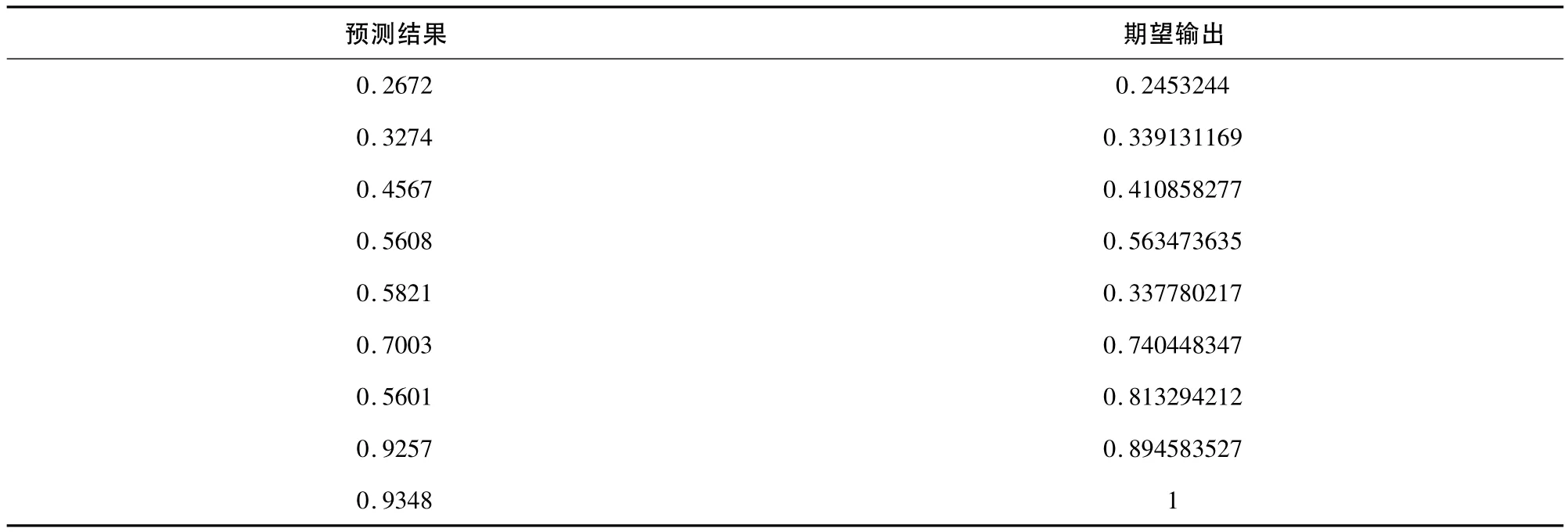
表2 四个神经元预测结果比较表
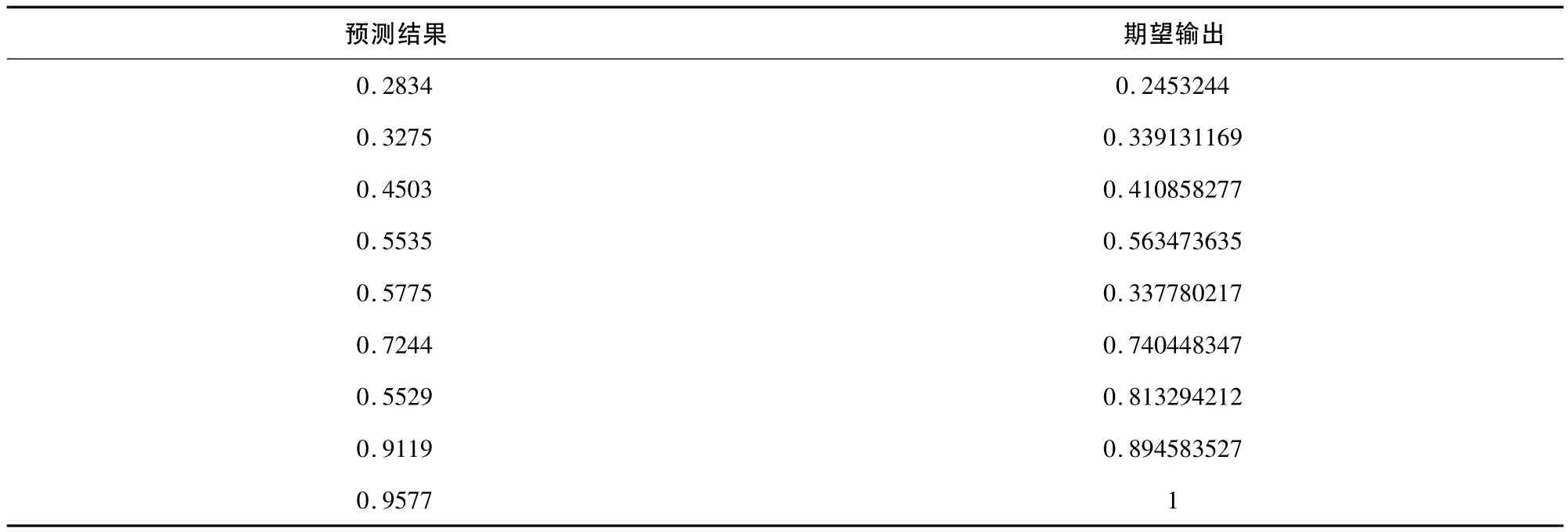
表3 五个神经元预测结果比较表
三组数据的误差均方根值比较如表4所示

表4 误差均方根值比较表
由于三个神经元误差均方根最小,所以采用三个神经元进行预测。将三个神经元预测数据反归一化,得到的预测烈度值与期望输出烈度值对比如表5
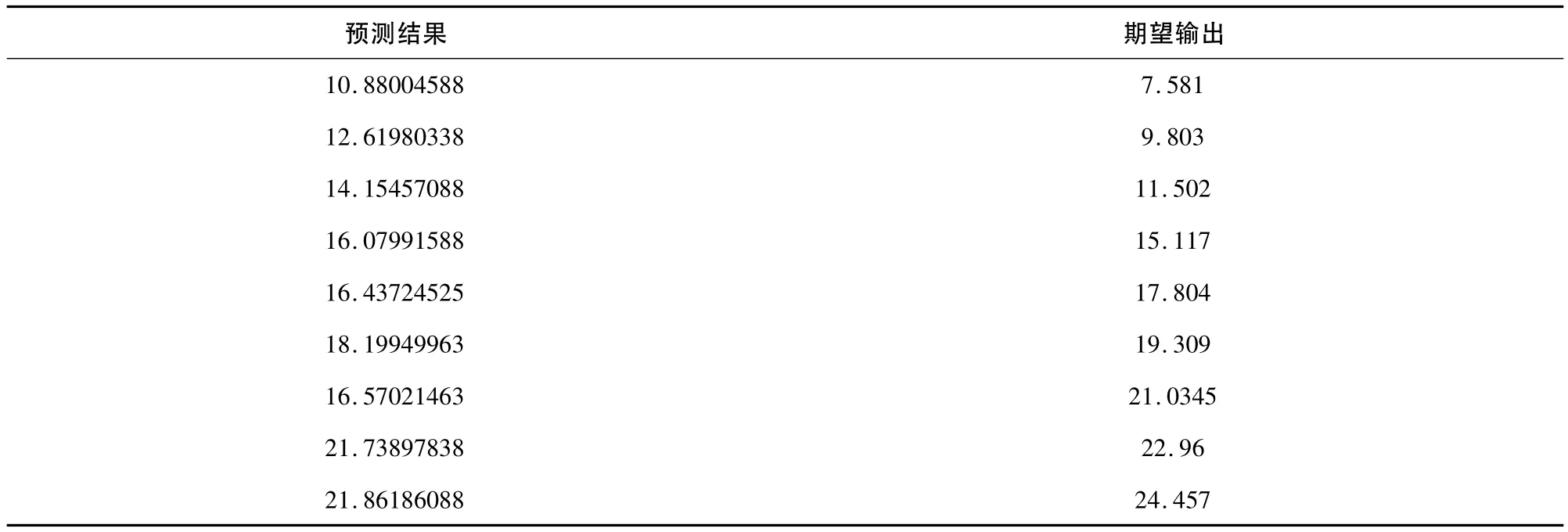
表5 预测烈度比较表
根据ISO2372,对于大型旋转机械B级和C级的振动烈度一级警报的边界值为7.1 mm/s,C级和D级的振动烈度二级警报的边界值为18 mm/s。如果振动烈度值变化显著,并且超过报警上限值的25%,那么不管是增加或者减少振动值都应该报警。所以前后两次测量值变化值大于1.8 mm/s时,则因一级报警。同理当测量值变化大于4.5 mm/s时,则二级报警启动。预测烈度值的变化与实际相仿,不会造成误报。
3 结论
从上面的结果分析中可以看出该方案的网络性能较好,具有实际应用及推广价值。该模型的实际输出与期望输出误差很小,预测结果与实际情况一致,并且结论直观。说明基于MAT-LAB神经网络工具箱的BP网络对风机故障预测是可行的。
[1]王江萍.机械设备故障诊断技术及应用[M].西安:西北工业大学出版社,2001:180-182.
[2]李强,徐戈,杨彩霞.人工神经网络在潜在地震危险区估计中的应用[J].华北地震科学,2007,25(2):36-41.
[3]董长虹.神经网络与应用[M].北京:国防工业出版社,2005:124-143.
[4]Pei J,Han J,Mortazavi B.Prefixspan:mining sequential patternsefficiently by prefix—projected pattern growth[J].Data Engineering,2001,8(4):215-224.
[5]明庆忠,李庆雷.发展旅游循环经济的科技支撑研究[M].北京:科学出版社,2008.
