基于ARM的冰蓄冷空调系统控制研究
2013-08-27宋池
宋 池
(江苏柏诚工程股份有限公司,江苏 无锡 214072)
0 引言
中央空调系统是智能建筑创造舒适、高效的工作和生活环境不可缺少的重要设备。中央空调系统的自动控制在智能建筑楼宇自动化系统中占有非常重要的地位。自20世纪70年代世界能源危机以来,各国政府都十分重视开发新能源与“节省能源”,促使了蓄冷技术的迅速发展。冰蓄冷是中央空调制冷的一种方式。冰蓄冷空调不仅使电力负荷“削峰填谷”,提高发电设备的年利用率,也保证制冷机组满负荷高效率运行,降低空调系统的运行费用,带来了显著的社会效益和经济效益[1-3]。
中央空调传统的控制方法是采用直接数字控制器(DDC)方式,将各个温度、湿度检测点和控制点连接到1台或多台DDC,实行多点实时监控。采用DDC方式进行控制具有引线过长、施工不便及系统通信的实时性和可靠性不高等缺点。为此可采用CAN总线技术设计中央空调控制系统[4]。
1 系统介绍
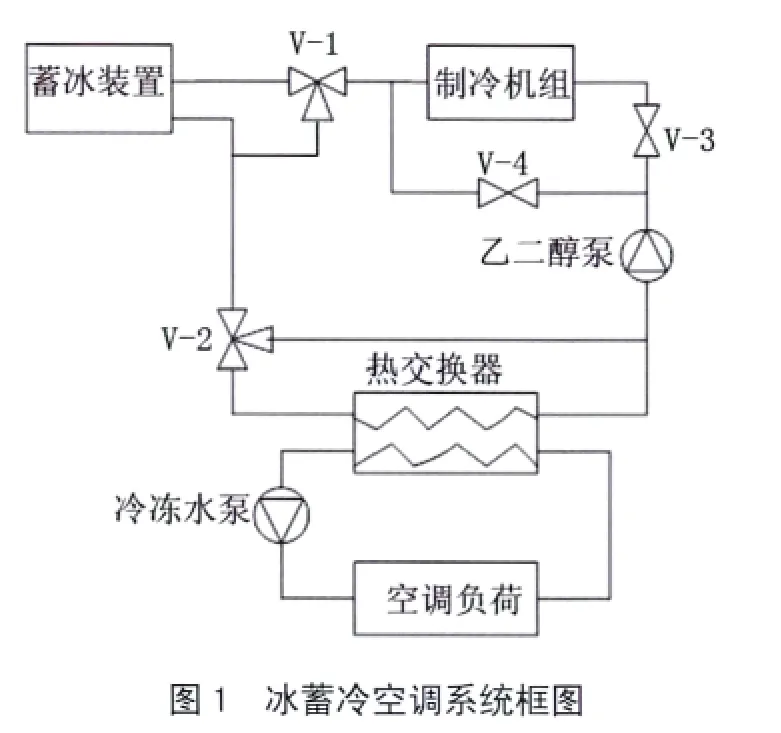
冰蓄冷空调就是在夜间电网低谷时期开启制冷机制冷,由蓄冷设备将冷量以冰的形式储存起来,在白天电网峰时段冰融化释放冷量,用以满足部分或全部供冷要求,使制冷机少开甚至不开,从而达到电网的削峰填谷目的。冰蓄冷空调系统框图如图1所示[1]。
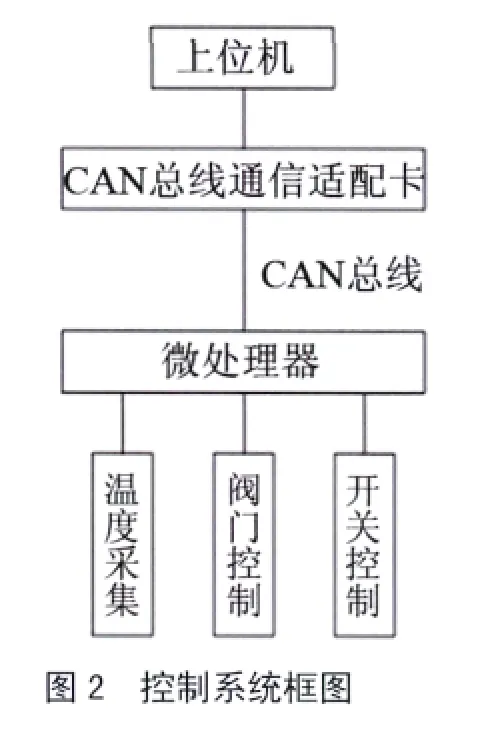
系统采用分布式监控方案,主要包括操作站(上位机)和现场采集控制系统。上位机负责系统数据的接收与管理,控制命令的发送及系统工作过程的实时显示等。各单元控制器作为下位机(采用ARM微控制器)负责现场温度的检测采集及阀门工作状态的控制等。单元控制器内的CAN控制器负责接收来自CAN总线的数据以及通过CAN总线向上位机发送数据。上位机通过插在PC总线扩展槽内的智能CAN总线通信适配卡连接CAN总线与各单元控制器。图2是本控制系统的框图。
2 控制系统硬件设计
由于数字式温度传感器更适用于与各种微处理接口组成的自动温度控制系统,可以克服模拟传感器与微处理接口时需要信号调理电路和A/D转换器的不足之处。故温度检测装置采用DS18B20单总线数字式温度传感器,可以把温度值直接转换成数字量,其输入量程为-55~+125 ℃。
2.1 控制器的选择
CAN总线广泛用于离散控制领域,其总线规范也已被ISO国际标准组织制定为国际标准。
CAN的信号传输采用短帧结构,传输时间短,具有自动关闭功能,具有较强的抗干扰能力。CAN支持多主工作方式,并采用了非破坏性总线仲裁技术,通过设置优先级来避免冲突,通讯距离最远可达10 km(5 kbps),通讯速率最高可达1 Mbps(40 m),网络节点数实际可达110个。
故系统采用CAN总线进行系统通信。因此也选用了带CAN控制器的ARM微控制器LPC2119。
LPC2119基于一个支持实时仿真和跟踪的16/32位ARM 7TDMI-STM CPU,并带有128/256k字节嵌入的高速Flash存储器。128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行。对代码规模有严格控制的应用可使用16位Thumb模式将代码规模降低超过30%,而性能的损失却很小。
由于LPC2119非常小的64脚封装、极低的功耗、多个32位定时器、4路10位ADC、2路CAN、M通道、46个GPIO以及多达9个外部中断使它们特别适用于汽车、工业控制应用以及医疗系统和容错维护总线。由于内置了宽范围的串行通信接口,它们也非常适合于通信网关、协议转换器以及其他各种类型的应用[5]。
2.2 CAN接口板设计
LPC2119虽然内嵌CAN控制器,但必须与CAN收发器连接才能具备收发功能。首先,CAN收发器把CAN控制器的逻辑电平转换成抗干扰能力强的差分电平,然后往CAN总线上发送;接收时刚好相反,CAN收发器接收到CAN总线的信号后,转换成逻辑电平送给CAN控制器,完成接收过程。在本系统中,实现这一功能的器件即CAN总线驱动器82C250。
82C250是Philips公司的CAN总线驱动器,是CAN控制器与物理总线之间的接口。器件可以提供对总线的差动发送和接收功能。表1是其引脚功能说明。
EasyARM 2100开发板可以很方便地与CAN接口板连接,组成完整的CAN节点。CAN接口板的原理图如图3所示。

表1 82C250引脚说明

2.3 阀门控制电路设计
阀门控制电路原理图如图4所示。
阀门是由4~20 mA电流驱动,因此必须把微控制器输出的数字量转化成模拟量输出。由于选用的ARM微控制器LPC2119不带D/A转换功能,必须另外选择D/A芯片进行D/A转换。系统选用I2C总线接口的D/A转换芯片DAC6573。由于该D/A芯片是电压输出,还需进行V/I转换,在此选用V/I转换芯片AD694。
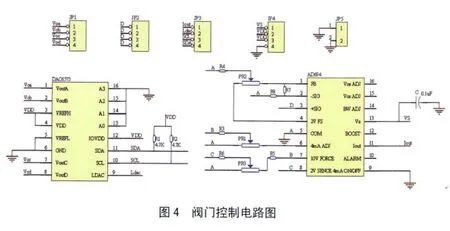
DAC6573是低功耗、4通道、10位电压输出的DAC,使用I2C两线串行接口,在总线上最多可扩展到16片,即64通道。
AD694是AD公司推出的电压电流转换芯片,0~2 V/0~10 V输入、0~20 mA/4~20 mA输出,4.5~36 V宽范围电源供电,提供精确的2 V或10 V基准电压。
3 控制方案
本设计的被控对象是空调房间,输入量是冷却水流量,输出量是房间内温度。由操作经验可知,被控对象是一个大滞后、非线性、时变的复杂控制对象,难以确定精确的数学模型,所以采用积分分离PID控制算法。即在偏差较大时,采用PD控制,可避免过大的超调,又使系统有较快的响应;在偏差较小时,采用PID控制,可保证系统的控制精度[6]。
在普通的PID数字控制器中引入积分环节的目的,主要是为了消除静差、提高精度。但在过程的启动、结束或大幅度增减设定值时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,致使算得的控制量超过执行机构可能最大动作范围对应的极限控制量,最终引起系统较大的超调,甚至引起系统的振荡,这是某些生产过程中绝对不允许的。引进积分分离PID控制算法,既保持了积分作用,又减少了超调量,使得控制性能有了较大的改善。其具体实现如下:
(1)根据实际情况,认为设定一阀门阈值ε>0。
(2)当|e(k)|>ε时,也即偏差值|ε(k)|比较大时,采用PD控制,可避免过大的超调,又使系统有较快的响应。
(3)当|e(k)|≤ε时,也即偏差值|ε(k)|比较小时,采用PID控制,可保证系统的控制精度。
写成计算公式,可在积分项乘一个系数β,β按下式取值:

以位置式PID算式为例,写成积分分离形式为:

当|e(k)|>ε时,即β=0,进行PD控制,PD控制算法为:
其中:

当|e(k)|≤ε时,取β=1,进行PID控制,PID控制的算法采用增量式PID控制算法,即:

其中:
通过式(1)、(2),便可编制出计算机控制程序,其流程图如图5所示。

4 实验波形
根据设计搭建电路进行实验验证,主要实验结果如下:
4.1 CAN总线通信实验数据与波形
在实验中,对CAN总线通信程序进行测试。利用CAN总线发送数据“00 01 02 03 04 05 06 07”到上位机,在CANTEST测试软件窗口中能接收到该数据帧,并测得相应的波形,如图6所示。

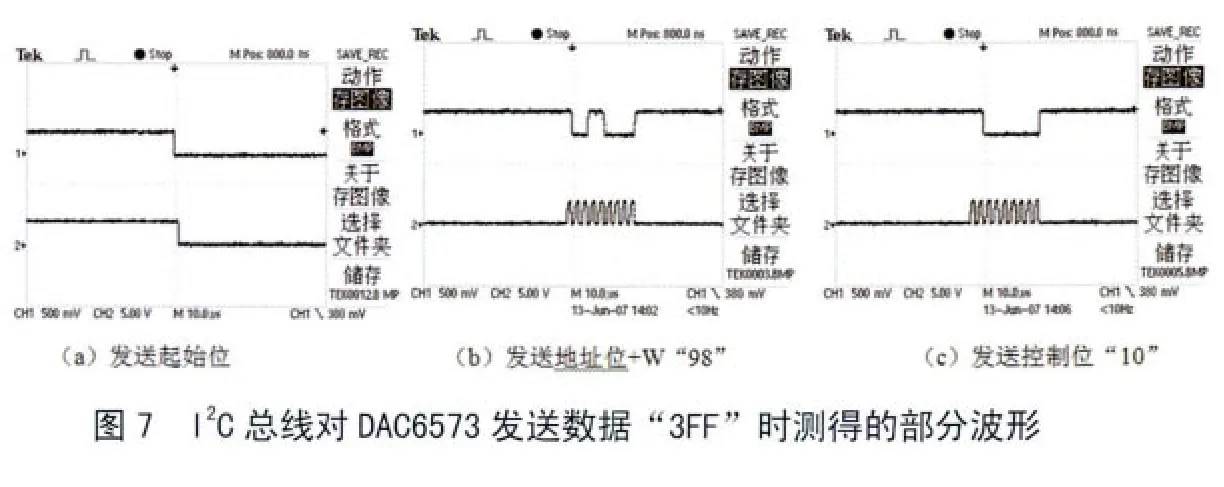
4.2 I2C总线数据传输波形测量
在实验中,对I2C总线发送数据进行测试。图7是利用I2C总线对DAC6573发送数据“3FF”时测得的波形。波形图中1代表SDA线上的波形,2代表SCL线上的波形。
5 结语
本文采用ARM器件作为冰蓄冷空调系统电气控制的控制部件,选用I2C总线接口的D/A转换芯片和V/I转换芯片,设计了阀门控制等硬件电路和控制程序,并由实验证实了控制电路及程序的正确性。对冰蓄冷空调系统的控制起到了非常好的控制效果。
[1] 严德隆,张维君.空调蓄冷应用技术[M].北京:中国建筑工业出版社,1997
[2] 杨晓军.冰蓄冷空调控制系统的设计与应用[D].西安:西安理工大学,2007
[3] 梅海峰.考虑负荷影响的空调冰蓄冷系统的优化运行[D].上海:东华大学,2006
[4] 林勇.CAN总线在中央空调控制系统中的应用[J].电子技术应用,2001,27(7):33~34
[5] 周立功.ARM微控制器基础与实战[M].第2版.北京:北京航空航天大学出版社,2005
[6] 陶永华.新型PID控制及其应用[M].第2版.北京:机械工业出版社,2002