水下声自导武器目标跟踪方法研究
2013-08-24杨向锋杨云川陈亚林
杨向锋,杨云川,陈亚林
中国船舶重工集团公司 第705研究所,西安 710075
1 引言
目标跟踪是水下声学观测系统的重要功能之一,卡尔曼滤波方法是进行目标跟踪的主要方法[1],利用卡尔曼滤波方法对水下目标进行跟踪近年来得到了广泛的研究[2-6],但主要是针对水下声学观测系统基于被动观测方式的纯方位目标跟踪方法研究,其观测平台静止或按固定航路低速运动,其采样间隔固定。水下声自导武器因其多采用主动观测方式并且具有高速运动特性,其目标跟踪方法研究不多。水下声自导武器工作在主动方式时,通过发射声信号并接收目标反射信号对目标进行检测、参量估计,获得目标相对的空间信息后通过弹道机动向目标运动,在向目标运动过程中继续进行检测、参量估计、按一定规律调整运动方向跟踪目标,由此可见水下声自导武器作为观测平台一直处于高速机动状态。在作战过程中,水下声自导武器与目标的相对位置不断变化,水下声自导武器会根据与目标的距离实时调整探测波形和检测周期,同时水下声自导武器进行弹道机动时需要一定的时间实现,最终导致其采样间隔处于变化之中。综合以上两方面的因素,水下声自导武器跟踪目标的过程表现为一个动基座时变过程。本文主要研究水下主动声自导武器标跟踪问题,分析了水下主动声自导武器的工作特点并建立了水下主动声自导武器主动目标跟踪模型,对跟踪模型进行了仿真实验。
2 跟踪建模
卡尔曼滤波方法对目标进行跟踪时,要求目标的多次观测必须处于同一个观测坐标系下,而采样间隔必须是确知的,因此水下声自导武器利用卡尔曼滤波方法对目标进行跟踪必须解决基座运动和观测时变的问题。
2.1 坐标变换
定义O1x1y1z1为水下声自导武器坐标系,原点O1为水下声自导武器质心,轴向指向头部方向为O1x1轴,O1y1轴垂直于O1x1并指向正上方,O1z1轴垂直于O1x1z1平面并符合右手坐标系[7];空间任一点目标在水下声自导武器坐标系中的检测信息为(r,α,β),如图1所示。
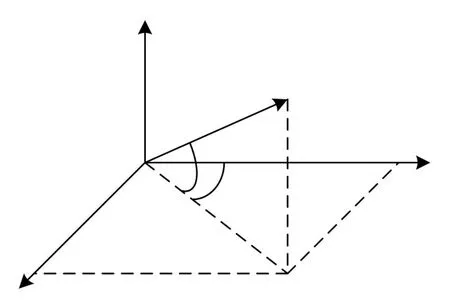
图1 水下声自导武器坐标系
由几何关系可知其水下声自导武器坐标系的坐标计算公式如下:

定义O xyz为大地坐标系,原点O为发射点,O y轴垂直向上,Ox轴为发射方向,Oz轴垂直于Oxy平面并符合右手坐标系[8];水下声自导武器作为一个具有六自由度的刚体,其坐标系相对于大地坐标系的位置就由六个坐标来确定,即水下声自导武器坐标系原点在大地坐标系中的坐标(x0,y0,z0)和水下声自导武器坐标系与大地坐标系之间的三个夹角(ψ,θ,φ)。三个角度分别表示水下声自导武器的偏航角ψ、俯仰角θ和横滚角φ,偏航角从尾部看向左为正,俯仰角向从尾部看向上为正,横滚角从尾部看向右为正,水下声自导武器坐标系与大地坐标系的旋转关系如图2所示。
由几何关系可知,水下声自导武器坐标系到大地坐标系的旋转转换矩阵可以表示为:

若水下声自导武器坐标系原点在大地坐标系中的坐标为(x0,y0,z0),与大地坐标系之间的三个夹角为(ψ,θ,φ),则水下声自导武器坐标系中任一点目标(x1,y1,z1)在大地坐标系下的坐标(x,y,z)可以表示为:

水下声自导武器导航定位系统可以实时提供其在大地坐标系的六个坐标(x0,y0,z0,ψ,θ,φ),通过坐标变换将目标坐标从水下声自导武器坐标系变换到大地坐标系,解决了观测基座运动的问题。坐标变换使得目标的多次观测处于同一个观测坐标系下,满足卡尔曼滤波器观测平台静止的要求。
2.2 目标状态方程
对水下目标而言,在未受到攻击时,在水下可能静止或匀速运动;在受到水下声自导武器攻击时的运动不外乎加速、转弯、下潜等,在运动过程中其加速度一般恒定或变化不大可认为恒定,因此目标的坐标方程、速度方程、加速度方程如下:
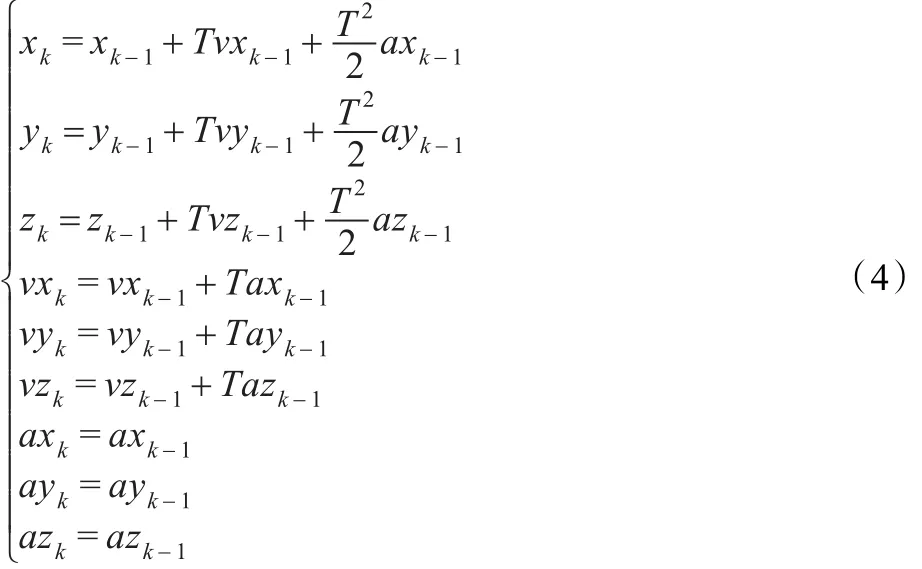
式中,xk、yk、zk,vxk、vyk、vzk,axk、ayk、azk分别是目标在大地坐标系x轴、y轴、z轴上的坐标、速度、加速度,T是采样周期。
水下声自导武器攻击目标的过程是一个时变过程,相邻两次检测之间可能存在水下声自导武器弹道的变换过程,同时根据自导系统配置可能存在周期时间调整,而且在自导工作过程中可能出现某周期丢失目标,下周期又检测到目标的情况,即式(4)中的T是变化的,而卡尔曼滤波方法要求系统采样周期必须是确知且等间隔,T变化导致状态转移矩阵不确定,因此无法直接使用卡尔曼滤波方法。
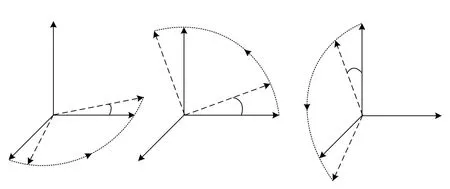
图2 水下声自导武器坐标系与大地坐标系的旋转关系
水下声自导武器自导系统可以在统一时钟下提供每次检测的精确时间,采样周期可以通过相邻两次观测的时间进行实时计算,即

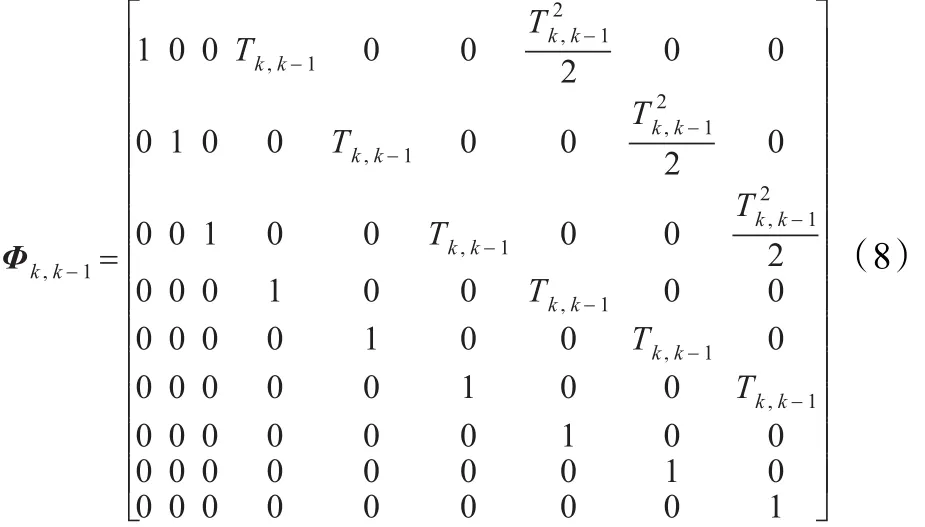
tk为第k次观测时间,通过实时计算采样周期Tk,k-1就解决了观测时变问题。实时计算采样周期Tk,k-1后,虽然不能满足标准卡尔曼滤波方法对采样周期等间隔的要求,但状态转移矩阵可以利用Tk,k-1进行实时计算,能满足卡尔曼滤波方法递推计算的需要。
2.3 跟踪模型
水下声自导武器攻击目标的过程相对短暂,可以忽略外界的环境对目标运动的干扰,选择目标在大地坐标系x轴、y轴、z轴上的坐标、速度、加速度为状态向量。

则状态方程及状态转移矩阵可表示为:

水下声自导武器检测目标是直接测量,考虑到测量噪声nk,观测方程可表示为:

得到状态方程和观测方程后就可以给出Kalman滤波的递推公式如下:
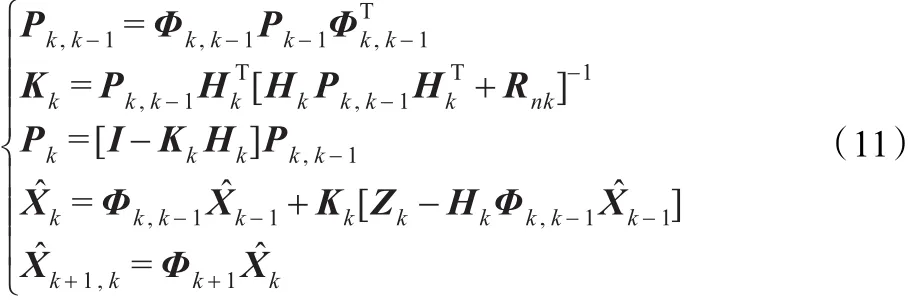
该模型为了降低复杂度而忽略了外界的环境对目标运动的干扰以及假设运动过程中其加速度恒定,该简化近似可能导致系统模型的不准确。卡尔曼滤波是无限增长记忆的滤波,k时刻的最优估计要用到k时刻以前的全部观测数据,随着k的增大,滤波值中的老数据比重太大,而新数据比重太小,当系统存在模型误差和计算误差时,新的观测数据对修正状态估计的作用太小,不能有效地抑制误差对状态估计值的影响,从而导致卡尔曼滤波精度下降甚至滤波发散。为了减小模型的不准误差,人们对传统的增长记忆卡尔曼滤波器进行了改造[8-9],衰减记忆卡尔曼滤波器便是比较成功且易于实现的一种改进方法。
在Kalman递推公式(11)中,计算 Pk,k-1时以 S Pk-1替代Pk-1,S称为衰减因子。当S>1时,当前数据的作用得到加强,历史数据的作用随着递推计算慢慢弱化,实际应用中衰减因子的选取对滤波结果产生很大影响,若采取固定值的方法,在一些情况下可能会发生异常,甚至导致滤波发散。文献[8]利用新息序列与量测值匹配程度自动调整衰减因子取得较好的结果,本文利用目标坐标量测值与坐标滤波估计值的匹配程度自动调整衰减因子,自适应约束条件如下:

式中,xk、yk、zk为 k 时刻坐标量测值,̂、、为 k 时刻坐标滤波估计值。
k+1时刻的衰减因子Sk+1按下式选取:

式中,a为一个正实数,λ为判别门限。
如果滤波正常,则经过滤波得到的坐标滤波估计值与坐标量测值在一定误差范围内是匹配的,此时取Sk=1,在k时刻不进行衰减记忆滤波;如果滤波异常或发散,则经过滤波得到的坐标滤波估计值与坐标量测值会出现较大的偏差,此时取Sk=aλ>1,在k时刻进行衰减记忆滤波,使得新数据对状态估计的修正得到加强。

在工程上通常以初次检测值为坐标初值并认为初始速度和加速度为零,若初次检测值为[x0,y0,z0],则状态变量初值如下:

式(9)的Rnk是量测误差矩阵,反映水下声自导武器检测造成的误差,与检测算法、信号波形、频带及水声环境等有关,本文根据工程经验按下式选取。

根据上式可知:

由于任意两次观测相互独立,所以有:

由式(17)、(18)、(19)可知:

衰减因子选择的判别门限λ反映的是量测值与滤波估计值匹配时的偏差,可以依据量测值的方差选择,文中给出了量测值的方差工程经验值σx,σy,σz,λ按下式计算:

已知观测值(水下声自导武器检测值经过坐标变换)Zk、观测时间tk,本文提出的水下声自导武器自适应衰减记忆Kalman滤波跟踪算法流程如图3。
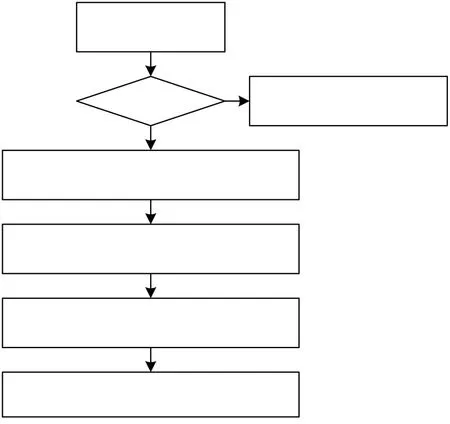
图3 自适应衰减记忆Kalman滤波跟踪算法流程图
3 仿真实验与分析
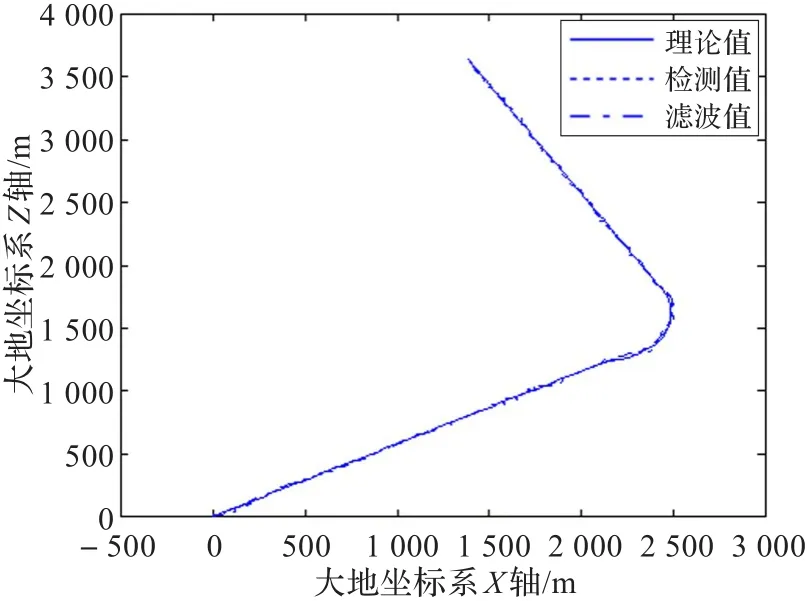
图4 自适应衰减记忆Kalman滤波跟踪结果
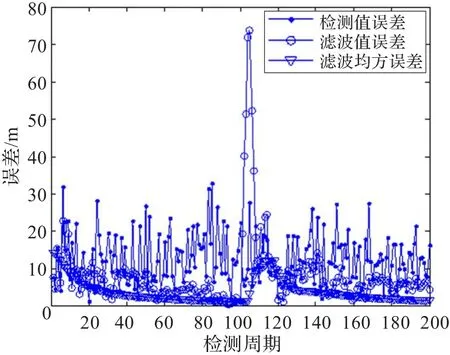
图6 自适应衰减记忆Kalman滤波误差曲线
为了验证跟踪模型的有效性,进行了数学仿真实验。目标以大地坐标系原点为起点,先在Oxz平面以5 m/s的速度沿与x轴夹角30º方向匀速直线运动,一段时间后以0.43 m2/s的加速度加速并以7.5º/s的角速率逆时针转弯,加速到10 m/s,运动方向转到与x轴夹角150º方向时匀速直线运动;采样间隔在完成转弯前为5 s加入方差为2 s随机高斯分布噪声,完成转完后为3 s加入方差为1 s随机高斯分布噪声,目标量测值根据采样间隔计算得到的理论值加入方差为10 m的随机高斯分布噪声。滤波初值=[0,0,0,0,0,0,0,0,0]T,P0=diag(100,100,100,200,200,200,400,400,400),Rnk=diag(10,10,10),衰减因子初值S0=1,计算Sk+1时a=0.01,λ=30.0。该数据样本模拟了水下声自导武器检测并跟踪目标的典型过程,开始水下声自导武器距离目标较远,检测周期较长,水下声自导武器跟踪目标一段时间后,目标开始通过加速转弯方式进行机动逃逸,此时水下声自导武器已经距离目标较近,检测周期缩短。数据样本由计算机模拟生成,分别应用本文提出自适应衰减记忆Kalman滤波跟踪算法和普通Kalman滤波跟踪算法对该数据样本进行了计算机仿真对比实验,跟踪及运动参数估计结果如图4~11所示。
仿真结果表明,在转弯之前的匀速直线运动过程中,自适应衰减记忆Kalman滤波与普通Kalman滤波实际上是相同的,经过10个观测周期约50 s后滤波误差明显小于原始检测值误差,运动学参数估计值收敛于数据样本设计值,而传统的纯方位目标跟踪方法一般需要数百秒的时间才能完成跟踪收敛。在加速转弯过程及之后的匀速直线运动过程中,两种滤波方法的滤波结果出现了明显的差异,虽然自适应衰减记忆Kalman滤波在加速转弯期间出现了较大的误差,但是通过进行自适应衰减记忆,在完成加速转弯后,经过10个观测周期约30 s后很快再次跟踪上目标,其运动学参数估计二次收敛,估计值正确,而普通Kalman滤波从转弯开始滤波出现了发散,不仅没有跟踪上目标,而且运动学参数估计错误。自适应衰减记忆Kalman滤波跟踪方法与传统的纯方位目标跟踪方法相比具有较快的收敛速度,与普通Kalman滤波跟踪方法相比具有较强的机动目标跟踪能力。
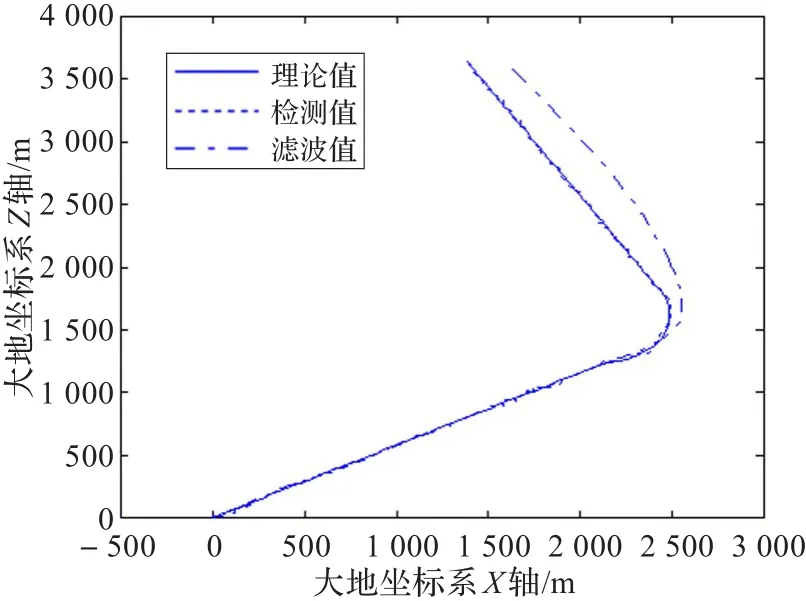
图5 普通Kalman滤波跟踪结果
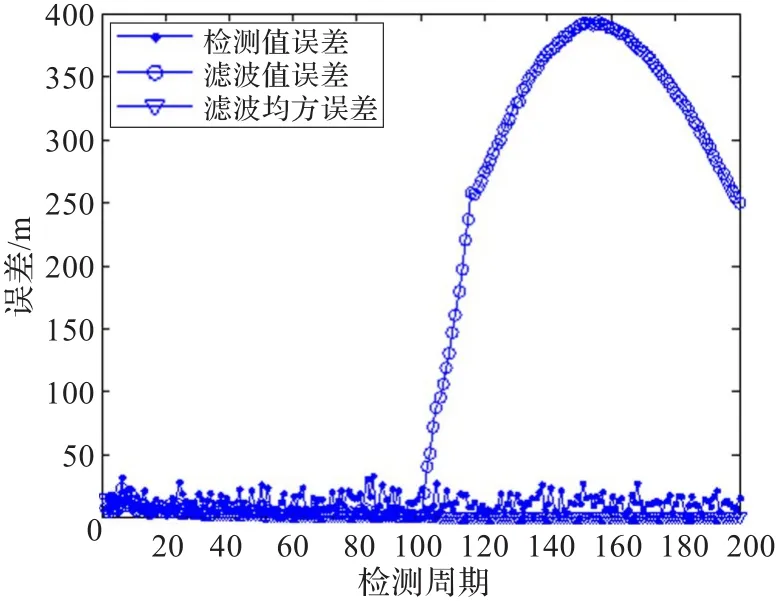
图7 普通Kalman滤波误差曲线
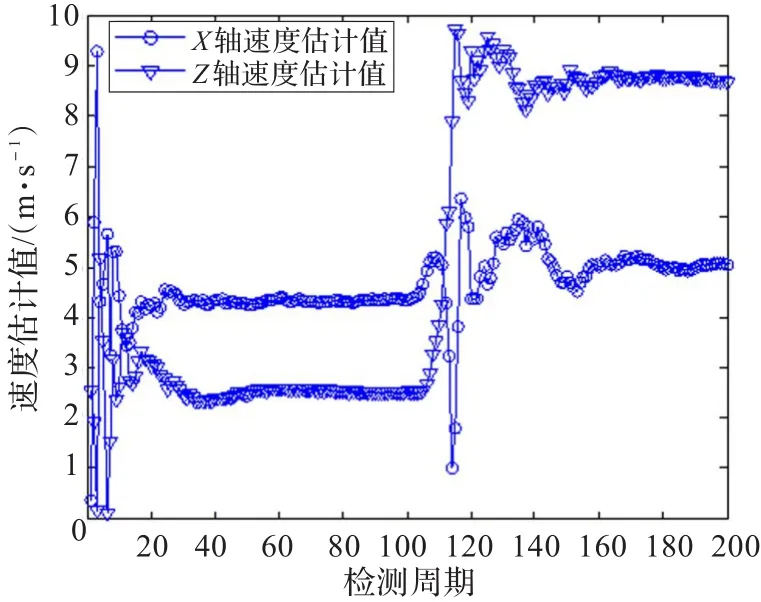
图8 自适应衰减记忆Kalman滤波速度估计结果
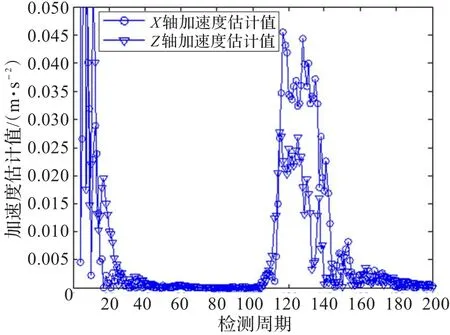
图10 自适应衰减记忆Kalman滤波加速度估计结果
4 结束语
主动水下声自导武器根据目标检测信息将自身导向目标的过程中一直处于高速机动状态,水下声自导武器变换检测周期、实施弹道机动以及受水声环境影响某周期丢失目标后下周期又检测到目标均会导致其观测时变。本文通过分析主动水下声自导武器的工作特点,通过坐标变换及实时计算采样时间解决了其观测基座运动和观测时变的问题,并建立了基于自适应衰减记忆Kalman滤波的主动水下声自导武器目标跟踪模型,给出了滤波初值在工程应用中的选取方法,仿真实验证明自适应衰减记忆Kalman滤波算法不仅具有较快的收敛速度和较高的运动学参数估计精度,而且能有效地跟踪高速机动目标,具有一定的工程应用价值。
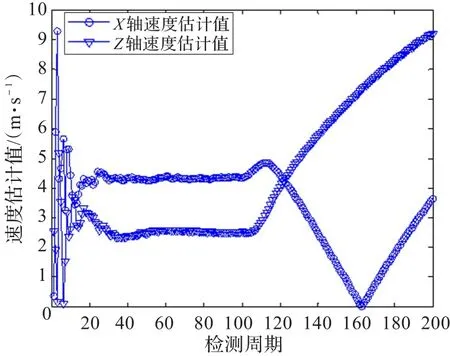
图9 普通Kalman滤波速度估计结果
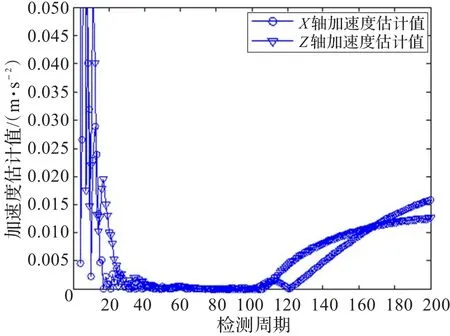
图11 普通Kalman滤波加速度估计结果
[1]权太范.目标跟踪新理论与技术[M].北京:国防工业出版社,2009.
[2]刘伟,王昌明,赵辉.基于卡尔曼滤波的水下近距目标运动分析[J].弹道学报,2008,20(4):28-31.
[3]吴盘龙,孔建寿.基于平方根UKF的水下纯方位目标跟踪[J].南京理工大学学报:自然科学版,2009,33(6):751-755.
[4]石章松,刘忠.单站纯方位目标多模型卡尔曼滤波跟踪算法的研究[J].系统仿真学报,2006,18(7):1802-1805.
[5]曲毅,刘忠,屈津竹.基于时延的水中目标纯方位跟踪算法[J].系统工程与电子技术,2007,29(1):107-109.
[6]叶灵军,曲毅,刘忠,等.水下纯方位目标运动分析的UKF滤波算法[J].火力与指挥控制,2009,34(8):132-134.
[7]严卫生.鱼雷航行力学[M].西安:西北工业大学出版社,2005.
[8]刘健,刘忠,曲毅.纯方位目标运动分析的自适应衰减记忆滤波算法[J].中国海洋大学学报,2006,36(4).
[9]章飞,周杏鹏,陈小惠.基于衰减记忆滤波的平方根UKF被动目标跟踪算法[J].测控技术,2010,29(4):22-26.
