机动车交通道路LED路灯照明效果实测
2013-08-23胡英奎张青文陈仲林张晟鹏
胡英奎,张青文,陈仲林,黄 珂,张晟鹏
(1.重庆大学建筑城规学院,重庆400045;2.西南科技大学土木工程与建筑学院,绵阳621010;3.重庆市江北嘴中央商务区开发投资有限公司,重庆400024)
随着“十城万盏”工程的全面推进,LED光源逐渐在照明工程中得到普及应用,特别是在隧道、城市道路等室外场所得到了大量应用。虽然LED光源在工程实践中已经得到大量应用,但我国相应的设计和测量标准还不健全,现行的城市道路照明设计标准和照明测量方法中均未对LED应用进行专门的规定。为了准确评价LED光源应用于城市道路照明的效果,笔者以某城市次干道LED光源照明效果的测量为例,探讨了城市机动车交通道路LED路灯照明效果的测量方法。
1 照度测量
我国现行CJJ 45―2006《城市道路照明设计标准》规定的城市机动车交通道路中次干道的平均照度Eav维持值为低档 10 lx、高档 15 lx,照度均匀度UE为0.35。
GB/T 5700—2008《照明测量方法》规定道路照度测量的路段范围:在道路纵向应为同一侧两根灯杆之间的区域;在道路横向,当灯具采用单侧布灯时,应为整条路宽,对称布灯、中心布灯和双侧交错布灯时,宜取二分之一的路宽。所测试的城市次干道采用对称布灯的方式,因此测试路段选择典型的纵向上为两根灯杆之间的区域,横向取二分之一路宽。
照度测量的布点方法,按照 GB/T 5700—2008《照明测量方法》的规定,当两根灯杆间距小于50 m时,宜沿道路(直道和弯道)纵向间距10等分;当两根灯杆间距大于50 m时,宜按每一网格边长小于或等于5 m的等间距划分。在道路横向宜将每条车道三等分。所测试的城市次干道两根灯杆间距为28 m,布点时沿道路方向每2.8 m布置测点。照度测量时采取四角布点法测量各测点的照度。照度测量布点方法如图1所示。
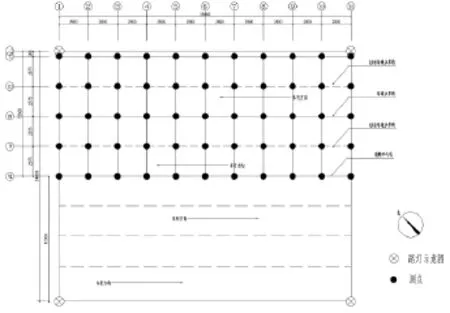
图1 测点布点示意图
照度测量应采用不低于一级的光照度计,对于道路的测量应采用分辨力≤0.1 lx的光照度计。本路段的照度测量仪器选用经过标定的XYI-Ⅲ型全数字照度计,该照度计的技术参数见表1。

表1 XYI-Ⅲ型全数字照度计的技术参数
经过现场实测、计算得到该测试路段路面平均照度值Eav为20.1 lx,达到了我国现行行业标准 CJJ 45—2006《城市道路照明设计标准》对次干道照度标准值的要求(该标准规定的平均照度低档值为10 lx,高档值为15 lx);计算得到的路面照度均匀度UE为0.62,超过了CJJ 45—2006规定的次干道路面照度均匀度0.35的标准值。
2 亮度测量
我国现行CJJ 45―2006《城市道路照明设计标准》规定的城市机动车交通道路中次干道的路面平均亮度 Lav维持值为低档 0.75 cd/m2、高档1.0 cd/m2,照度总均匀度UO最小值为0.4,纵向均匀度UL最小值为 0.5。
GB/T 5700—2008《照明测量方法》规定道路亮度测量的路段范围:在道路纵向应为从一根灯杆起100 m距离以内的区域,至少应包括同一侧两根灯杆之间的区域;对于交错布灯,应为观测方向左侧灯下开始的两根灯杆之间的区域。所测试的城市次干道采用对称布灯的方式,因此测试路段选择典型的纵向上为两根灯杆之间的区域。
亮度测量的布点方法,按照GB/T 5700—2008《照明测量方法》的规定,在道路的纵向,当两根灯杆间距小于50 m时,通常应在两根灯杆间等间距布置10个测点;当两根灯杆间距大于50 m时,应按两测点间距小于或等于5 m的原则确定测点数。在道路横向,在每条车道横向布置5个测点,中间一点位于车道的中心线上,两侧最外面的两个点应分别位于距每条车道两侧边界线的1/10车道宽处。当亮度均匀度较好或测量的准确度要求较低时,在每条车道横向可布置3个点,其中间一点位于车道的中心线上,两侧的两个点分别位于距每条车道两侧边界线的1/6车道宽处。考虑所测路段的实际情况和要求,所测试的城市次干道两根灯杆间距为28 m,布点时沿道路方向每2.8 m布置测点;在每条车道横向可布置3个点,即采用与照度测量相同的布点方法,如图1所示。
亮度测量应采用不低于一级的亮度计。本测量的亮度测量仪器选用经过标定的LM–3瞄点式亮度计,其主要技术参数见表2。

表2 LM-3瞄点式亮度计技术参数
根据各测点的路面亮度值可以计算得到测试路段路面平均亮度值Lav为1.86 cd/m2,达到了我国现行行业标准CJJ 45—2006《城市道路照明设计标准》对次干道亮度标准值的要求(该标准规定的平均亮度低档值为 0.75 cd/m2,高档值为 1.0 cd/m2);计算得到的路面亮度总均匀度UO为0.42,超过了CJJ 45—2006规定的次干道路面亮度总均匀度0.4的标准值。
3 发现距离的测量
对于LED路灯照明效果还可以利用安全停车视距法评价驾驶员对小目标物的发现距离进行测量。所谓发现距离是指驾驶员驾车时在距离小目标多远的位置可以发现小目标。如果发现距离较短,驾驶员发现小目标后可能来不及采取必要的规避措施,可能发生交通事故。一般情况下,如果发现距离大于一个停车视距,驾驶员则有充分的时间采取规避障碍物的措施以保证交通安全。
驾驶员驾车行驶时发现路面上障碍物的距离难以直接测量,但利用iView X眼动仪可以记录驾驶员驾车过程中的视觉行为和驾驶员观察到的视觉环境,利用配套的视觉行为分析软件BeGaze可以分析出驾驶员发现障碍物的时刻t1及汽车经过障碍物的时刻t2,如果还知道汽车的行驶速度v,即可利用时间与速度的乘积计算得到驾驶员发现障碍物的距离S。
由于驾驶员发现障碍物的时刻t1和汽车经过障碍物的时刻t2都可以利用视觉行为分析软件BeGaze读取,确定汽车行驶的速度即成为测定发现距离的关键。作为指导道路照明设计的驾驶员对障碍物的发现距离,应该是汽车按照道路的设计速度通过时的发现距离,所以实际测试时,只需驾驶员按照道路的设计速度通过道路即可,上述的 v也取道路的设计速度。
驾驶员驾车过程中的视觉行为和观察到视觉场景用德国SMI公司生产的iView X HED眼动仪记录。眼动仪系统由头盔和一台笔记本电脑组成,头盔上安装了2个摄像头,1个摄像头通过记录驾驶员眼睛的数据来记录驾驶员的视觉行为,另外1个摄像头记录驾驶员观察到的场景,摄像头记录的数据通过数据线利用笔记本电脑的USB接口传输到笔记本电脑中,笔记本电脑中安装有设备专用的数据记录软件。眼动仪的佩戴见图2。

图2 iView X眼动仪的佩戴
测试用车使用本田CR-V,测试用车车况良好,前挡风玻璃及前排车窗清洁无污染,虽有贴膜但不影响驾驶员的安全驾驶。
被测人员要求具有一定的代表性,驾驶员应对测试用车的车况及操作较熟悉。被测人员均无色盲、色弱,矫正视力均在5.0以上。
由于驾驶员对障碍物的发现距离难以直接测量,本研究采用记录驾驶员从发现障碍物到驾车经过障碍物的时间,并根据该时间和汽车的行驶速度计算发现距离的方法间接测量发现距离。具体测试步骤如下:
1)对参加测试的驾驶员进行交底,告知他们测试的目的、测试过程中需要注意的问题,以使驾驶员了解测试的过程,消除其紧张感,使测试获得的数据更具有代表性。驾驶员要将汽车的行车速度保持在道路的设计行车速度40 km/h。
2)驾驶员按照正常的驾驶姿势坐在汽车驾驶座位上,戴上眼动仪头盔,调整头盔和头盔上的摄像头,使驾驶员感到舒适且摄像头能正常工作;眼动仪操作人员坐在汽车驾驶员后面的座位上,以确保操作人员的工作不会影响驾驶员的驾驶操作;将眼动仪的数据线连接到操作人员操作的计算机上,开启眼动仪的操作软件对眼动仪进行调整和校正。
3)测试人员将模拟障碍物的小目标随机地放在测试路段路面的任意位置,并确保驾驶员在驾车经过之前不知道障碍物放置的位置。
4)为确保汽车能以设计的行车速度40 km/h接近并通过障碍物,驾驶员从距测试路段200 m以外的地方启动汽车,并尽快将汽车加速至40 km/h,保持该行车速度按照正常行车状况驾车接近测试路段;汽车启动后,眼动仪操作人员操作软件开始记录驾驶员的视觉行为;为减小测试误差,驾驶员在驾车接近测试路段的过程中,发现路面上的障碍物后可以采取躲避障碍物的操作,但不得降低汽车的行驶速度;驾驶员驾车经过障碍物后,眼动仪操作人员停止记录眼动仪的数据。
5)在测试过程中,每换一名驾驶员,都要进行一次眼动仪的调整和校准工作;眼动仪校准好后若头盔在驾驶员的头上发生了移动,也要重新进行校准。
从眼动仪记录的数据文件中读取驾驶员从发现障碍物到驾车经过障碍物的所经历的时间,可以使用以下3种方法。
1)使用通用视频处理软件逐帧分析视频数据。
根据驾驶员在发现障碍物前后视觉行为的明显不同,利用通用视频处理软件逐帧读取视频图像,可以读出驾驶员发现障碍物的时刻t1,并能读出驾驶员驾车通过障碍物的时刻t2,据此即可计算出驾驶员从发现障碍物到驾车通过障碍物所经历的时间。该方法的优点是简单易行,不需要专业的数据处理软件即可完成;但该方法也存在明显的缺点:驾驶员发现障碍物的时刻依靠数据处理人员的人为判断,数据处理人员的经验、心情等主观因素对结果的影响较大。
2)利用BeGaze软件的grid AOI功能处理数据。
该方法操作过程简单,数据分析结果能以数据的形式精确表达。但该方法需要用到专业的视觉行为分析软件BeGaze,且所用的grid AOI功能只有该软件的专业(Professional)授权版本才具备。由于该方法主要通过分析受试者视觉关注点的变化来确定驾驶员发现路面上障碍物的时刻,如果路面上还有其他能吸引驾驶员注意力的视觉目标,则可能造成判断驾驶员发现障碍物的时刻出错。
3)利用BeGaze软件的动态AOI功能处理数据。
该方法操作过程简单,虽然也需要用到BeGaze软件,但分析过程中用到的软件功能是非专业(Professional)授权版本也具备的。用该方法分析数据得到的结果也能以精确数据的形式显示出驾驶员发现障碍物的时刻。
在对各种数据处理方法的优缺点及适用性进行对比分析的基础上,测试利用BeGaze软件的动态AOI功能对试验数据进行处理。数据处理结果显示,测试路段驾驶员的对小目标的发现距离为55~67 m,远大于40 km/h的停车视距26 m。因此,从测试数据来看,该测试路段安装LED路灯的照明效果能保证正常行车的交通安全。
4 小结
文章通过工程实例探索了LED光源应用于城市机动车交通道路照明时的照明效果评价方法,其中照度和亮度的测量采用我国现行GB/T 5700—2008《照明测量方法》中规定的方法。在照度和亮度指标之外,提出了对小目标发现距离这一评价指标,并提出了该指标的测量方法,该指标可以直接评价照明效果对行车安全的影响,在进行照明效果评价时可以作为照度和亮度指标的补充。
[1] 科技部启动“十城万盏”半导体照明应用工程试点[EB/OL].(2009-05-11)[2011-12-06].http://www.gov.cn/gzdt/2009 -05/11/content_1310133.htm
[2] CJJ 45—2006城市道路照明设计标准[S].北京:中国建筑工业出版社,2006
[3] GB/T 5700—2008照明测量方法[S].北京:中国标准出版社,2008