缝纫线自动初绕装置的设计与研究
2013-08-22冯关明章建军陈水明
柯 良,冯关明,章建军,陈水明
(浙江工业职业技术学院,绍兴 312000)
0 引言
缝纫线绕线机主要应用于缝纫线制线工艺的成型环节。缝纫线绕线机在缝纫线绕制过程中,需把缝纫线线头抓住,将线头在缝纫线管上缠绕几圈,这一过程称为缝纫线初始绕制,简称初绕。初绕完成后,绕线机主轴正转,带动主轴上的缝纫线线管同步转动[1]。因为缠绕在线管上的缝纫线与线管间存在摩擦力,便会随着线管一起旋转,缝纫线便会不断缠绕到线管上,从而完成缝纫线的绕制。目前,国内制线业使用的缝纫线线支卷绕设备,90%以上为普通绕线机,需要由人工方式完成初绕这个工序,工人的劳动强度大,绕线效率较低,而且对操作者熟练程度要求高。据统计,初绕工序的停机时间占到生产时间的20%-30%。本文提出一种能够自动完成抓线、断线、缠绕功能的缝纫线自动初绕装置,能够有效减轻工人的劳动强度,提高制线过程的自动化程度,提高绕线制线的效率[2]。
1 自动初绕装置的工作原理
缝纫线绕线机在绕制缝纫线的过程中,首先需要将空线管装到绕线机主轴上,拧紧压紧螺母后,自动初绕装置的抓线机构将4个缝纫线线头依次抓住,移动抓线机构使线头与压紧螺母接触,驱动主轴正转,利用缝纫线与压紧螺母表面的摩擦力,将缝纫线缠绕到缝纫线管上,当绕线圈数达到设定圈数时,主轴停止转动,如图1所示。绕线完成后,松开压紧螺母,取下绕制完成的线管,完成缝纫线绕制过程[3,4],自动绕线机工作流程如图2所示。

图1 缝纫线绕线机的机械结构简图
2 自动初绕装置结构组成
缝纫线绕线机自动初绕装置主要包括移动机构、抓线机构、断线机构。
移动机构包括驱动电机、联轴器、丝杠、导轨、丝杠螺母座、水平支板、前支座、后支座,如图3所示。移动机构的前支座固定于绕线机上,驱动电机固定在前支座上,通过联轴器与丝杠相连,丝杠通过丝杠螺母副与丝杠螺母座相连。通过控制驱动电机正反转,便可实现丝杠螺母座的左右移动,实现抓线机构和断线机构直线移动。
抓线机构如图4所示,包括松下CX440光电传感器、垂直支板、上夹板、4个夹头电磁铁、电磁铁上支撑板、电磁铁下支撑板。抓线机构的垂直支板固定于水平支板上。4个夹头电磁铁固定于电磁铁上支撑板和电磁铁下支撑板之间。光电传感器固定于垂直支板上,通过移动机构带动抓线机构由左向右移动,当光电传感器检测到缝。纫线位于夹头电磁铁和上夹板之间时,夹头电磁铁得电,电磁铁夹头向上顶出,将缝纫线压紧,完成抓线功能。
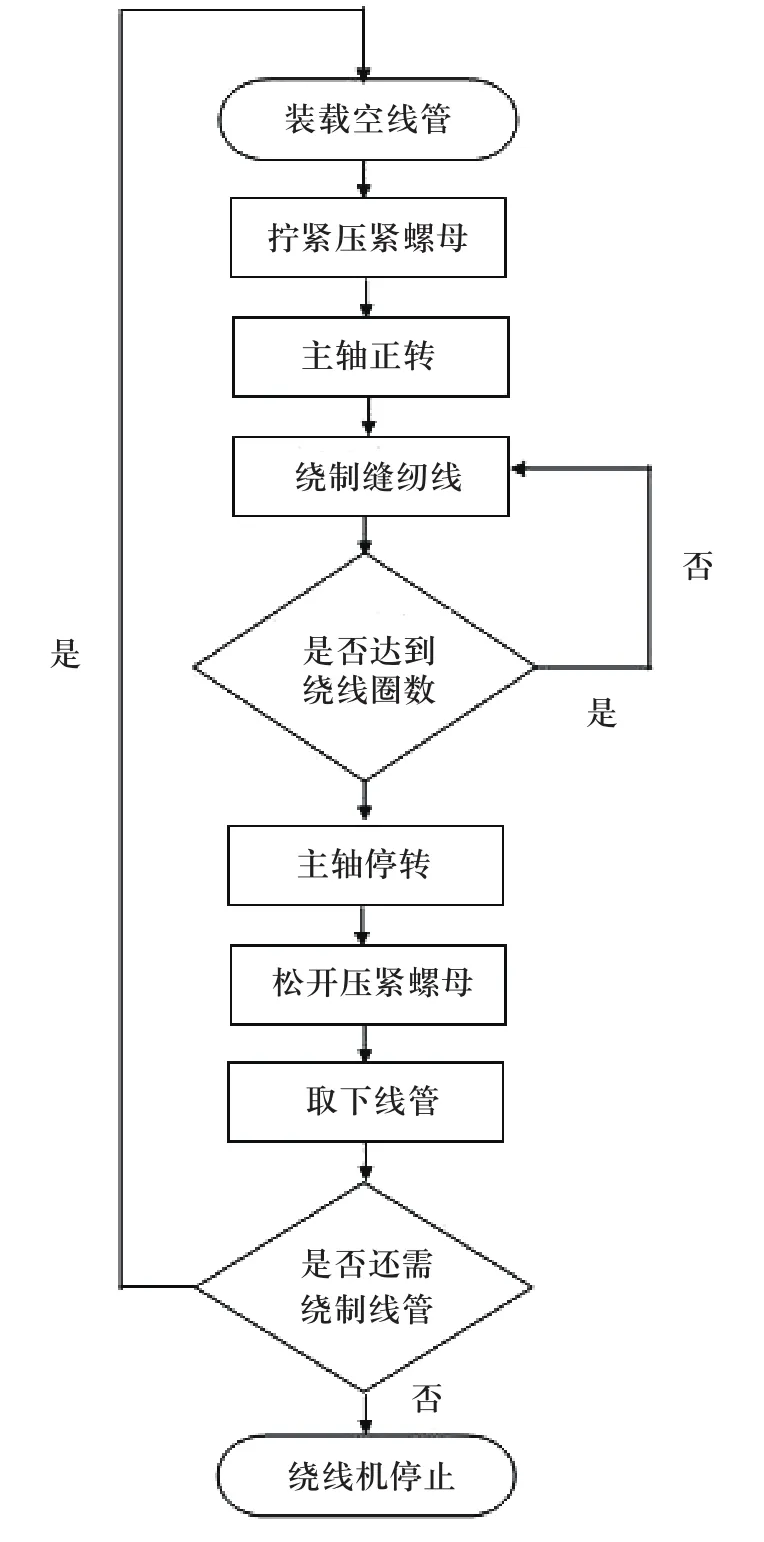
图2 绕线工作流程图

图3 移动机构机械结构简图
断线机构如图5所示,包括切断电磁铁、刀片、切断电磁铁支架。切断机构的切断电磁铁固定在垂直支板上,刀片通过螺钉1和螺钉2分别与垂直支板和切断电磁铁连接,当切断电磁铁得电后,电磁铁活动杆向下伸出,利用杠杆定律使刀片以螺钉为中心顺时针转动,切断夹在电磁铁夹头和上夹板之间有缝纫线,完成断线功能。

图4 抓线机构机械结构简图
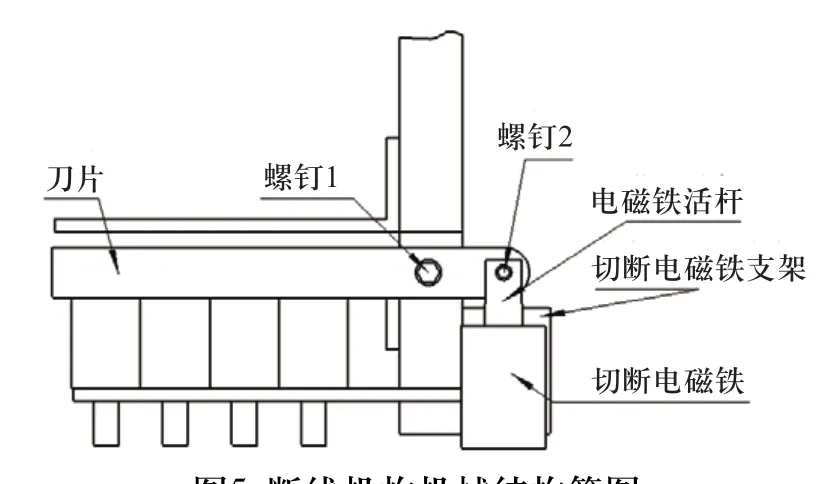
图5 断线机构机械结构简图
3 自动初绕装置工作过程
本系统选用三菱PLC作为控制元件,当绕线机完成绕线后,PLC 根据自动绕线程序发出指令,驱动初绕装置的驱动电机正传,通过丝杠螺母副的传动,带动抓线机构和断线机构向右运动,当松下CX440光电传感器检测到光电夹头电磁铁的夹头中心与缝纫线在竖直面内重合时,驱动电机停止转动,夹头电磁铁得电,电磁铁夹头向上伸出,与上夹板将的缝纫线夹住。完成抓线后,切断电磁铁得电,电磁铁活动杆向下伸出,刀片以螺钉为中心顺时针转动,切断夹在电磁铁夹头和上夹板之间有缝纫线,完成断线。驱动电机再次正传,继续带动抓线机构和断线机构向右运动,重复以上步骤,依次完成4根缝纫线的抓取和切断。
完成缝纫线的抓取和切断后,拧开锁紧螺母,将绕线机主轴上绕制完成的缝纫线线管取下,放上未绕线的缝纫线线管,拧上锁紧螺母,控制驱动电机反传,带动抓线机构和断线机构向左运动,到导轨的左极限位置,使垂直支板顺时针旋转45度,抓线机构夹住得缝纫线将与夹紧螺母接触。
控制绕线机主轴正传,由于缝纫线与夹紧螺母接触,表面具有一定摩擦力,通过绕线机主轴高速转动,将缝纫线缠绕到缝纫线线管上,完成缝纫线初始绕制。绕线机开始绕线,进入下一个工作循环。
4 结束语
本文针对缝纫线绕制过程中人工完成初绕工序耗时多,效率低的问题,通过创新性的研究和开发,初步完成了自动初绕装置的设计,本装置能够自动完成抓线、断线和缠绕等功能,可大幅提高绕线效率,改善绕线质量。
类似的装置还可应用于绣花线、尼龙线的绕制,满足高档服装、革制品、箱包、制鞋、拉链、绣花、家纺和领带等行业相关企业的绕线需求,具有广泛的市场需求和工业应用前景。
[1] 唐颖,孟宪松,刘军.自动环型绕线机的设计[J].林业机械与木工设备,2004,32(6):29-30.
[2] 魏俊波,胡国清.基于Pro/E的自动磁环绕线机虚拟设计与运动仿真[J].机械设计与制造,2011,(5):57-59.
[3] 赵晓东,董哲,王敏.全自动绕线机的研制[J].电子工业专用设备,2010,39(11):41-45.
[4] 刘洪玮,郭吉丰,孙云云,任军军.两轴伺服控制的绕线机系统[J].电气传动,2010,40(9):9-12.
