一种汽车防撞报警系统的设计与Proteus仿真
2013-08-22吕德深梁承权
吕德深,梁承权
(1. 华南师范大学 物理与电信工程学院,广州 510006;2. 南宁学院,南宁 530200)
0 引言
随着经济的快速增长,人民生活水平不断提高,私家车的数量大幅度增加,造成道路拥挤,交通事故频频发生,对人们生命造成严重的威胁,给人们财产带来了巨大的损失。安全驾驶成为人们关注的焦点,其中汽车防撞报警器的设计显得非常重要与迫切。针对这种情况,本文设计一种汽车防撞报警系统。该系统采用超声波测距原理,在车辆行驶时自动检测前方的车距[1]和相对速度并通过液晶显示,同时根据车距和相对速度通过声光报警电路发出预警信号,实时提醒驾驶员安全驾驶。
1 超声波测距测速原理
超声波是一种频率高于20000赫兹的机械波,指向性强,能量消耗慢,常温下在空气中的传播速度为 v0= 3 40m/s。超声波测距原理如图1所示,其在空气中传播的距离L:

式中t为超声波在空气中的传播时间。
由图1中的三角形关系可知:防撞报警系统与障碍物之间的距离d:

式中S为报警系统中超声波发射头与接收头之间的距离。
超声波在空气中传播速度v0受温度影响较大,所以必须考虑温度对速度的影响,速度与温度的关系为:

式中T为防撞报警系统的环境摄氏温度[2]。
由式(1)、(2)、(3)可知,考虑了温度影响后,报警系统与障碍物之间的距离d:

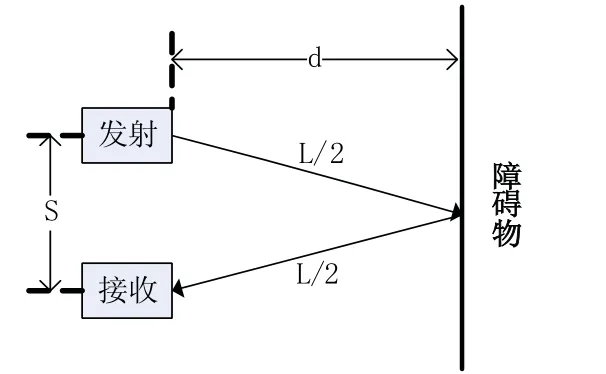
图1 超声波测距原理图
2 系统总体方案设计
该汽车防撞报警系统总体结构如图2所示,主要由主控制电路、超声波发射与接收电路、温度测量电路、液晶显示电路、声光报警提示电路等组成。主控制电路是该汽车防撞报警系统的核心组成部分,负责产生超声波发射电路所需的40KHz方波信号;同时对超声波接收电路检测分析的回波信号进行运算处理。温度测量电路主要采集环境温度,对超声波速度进行校正,提高测量精度。所测量的温度、距离、速度等信息最终通过液晶显示出来,同时系统根据所得的距离和相对速度进行控制声音报警提示电路和LED状态提示电路,达到提醒驾驶员安全驾驶的目的。

图2 系统总体框图
3 系统硬件设计
3.1 主控制电路设计
主控制电路一方面负责产生超声波发射电路所需的超声波信号;另一方面对超声波接收电路的回波信号进行处理,并控制声光报警电路进行预警提示。
系统采用ATMEL公司的AT89C51单片机作为主控制器。该单片机采用高密度、非易失性存储技术集成了丰富的片内外设资源,内含4K的flash,256字节的RAM,四组8位的IO口,2个外部中断,2个定时计数器和一个串行中断[3]。本系统主控制电路主要包括AT89C51单片机、时钟电路、复位电路等,其电路如图3所示。

图3 主控制电路图
3.2 超声波发射与接收电路设计
发射电路与接收电路在距离测量中至关重要。发射电路功率较小,或者频率不对,接收电路将难以接收到回波;接收电路放大倍数不够,或者周围环境干扰太大,容易造成接收不到回波信号或接收错误回波信号。
3.2.1 超声波发射电路
超声波产生的方式主要有:电气方式和机械方式,本系统采用电气方式的压电型超声波传感器,其主要利用压电晶体谐振工作,超声波发射电路如图4所示。单片机由定时器产生40KHz的方波信号经74HC04后送入转换器,最终以超声波形式发射出去。

图4 超声波发射电路
3.2.2 超声波接收电路
由于超声波在空气中传播受到空气阻碍作用,距离越远,反射回来的回波越弱。因此,接收到的回波信号必须进行放大、滤波、整形等处理。为了使电路简单可行,综合各方面考虑,本系统采用CX20106A为接收电路的核心器件[4],其芯片及外围电路如图5所示。CX20106A是索尼公司生产的一款红外解码芯片,解码中心频率由R14阻值决定,其内部集成了前置放大、限幅放大、宽频带滤波器、检波及比较器、整形、滞后比较器等电路。系统采用CX20106A,大大降低了接收电路的复杂程度。

图5 超声波接收电路
3.3 温度测量电路设计
由于超声波在空气中传播的速度受温度影响较大,在温度变化较大的场合必须考虑温度对速度的影响[5]。为了得到较高精度的温度,系统使用DALLAS公司的单总线数字式温度传感器DS18B20。其优势明显:抗干扰能力较强;外围电路较少,只需一个10kΩ的上拉电阻;单片机只需一个IO口就可对其读写。DS18B20传感器的电路如图6所示。

图6 DS18B20测温电路
3.4 液晶显示电路设计
传统电子设备通常采用LED数码管显示,其亮度高、价格低等优势而得到广泛应用。其缺点却很明显,显示内容较少、线路复杂,部分应用领域已被近年兴起的LCD液晶逐步取代。LCD液晶显示内容丰富、亮度均匀、性价比较高。本系统采用LCD12864液晶对温度、距离、速度、提示语进行显示。其电路接口如图7所示。

图7 LCD12864显示电路
3.5 报警提示电路设计
该防撞报警系统的报警提示电路如图8所示。当报警系统检测到障碍物距离大于5米并相对速度小于1m/s时,单片机控制蜂鸣器关闭,绿色LED亮,液晶上显示“安全”字样;否则,蜂鸣器发出报警声音,红色LED开始闪烁,液晶屏上显示“危险”字样;同时,距离越小,相对速度越大,报警声音频率越高,红色LED闪烁越快,从而起到提示驾驶员注意保持车距安全驾驶的作用[6]。
4 系统软件设计
4.1 总体软件设计
该防撞报警系统软件设计主要包括:超声波信号产生子程序、超声波接收中断和超时中断子程序、温度测量子程序、液晶显示子程序、预警处理子程序、距离修正子程序。系统软件流程图如图9所示。系统一开始进入初始化程序,包括LCD12864初始化、外部中断与定时器中断初始化、单片机IO口初始化等。单片机发送10个40KHz的方波后,单片机等待外部中断或定时器中断的发生。若单片机发生定时器中断,变量Test=2,说明超声波接收超时,此时定时器数据无效。若单片机接收回波的IO口P3.2发生外部中断,Test=1,此时读取定时器寄存器TH0、TL0的值,即可得到(4)式中的t,并根据t计算出报警系统与障碍物间的距离d。

图8 报警提示电路
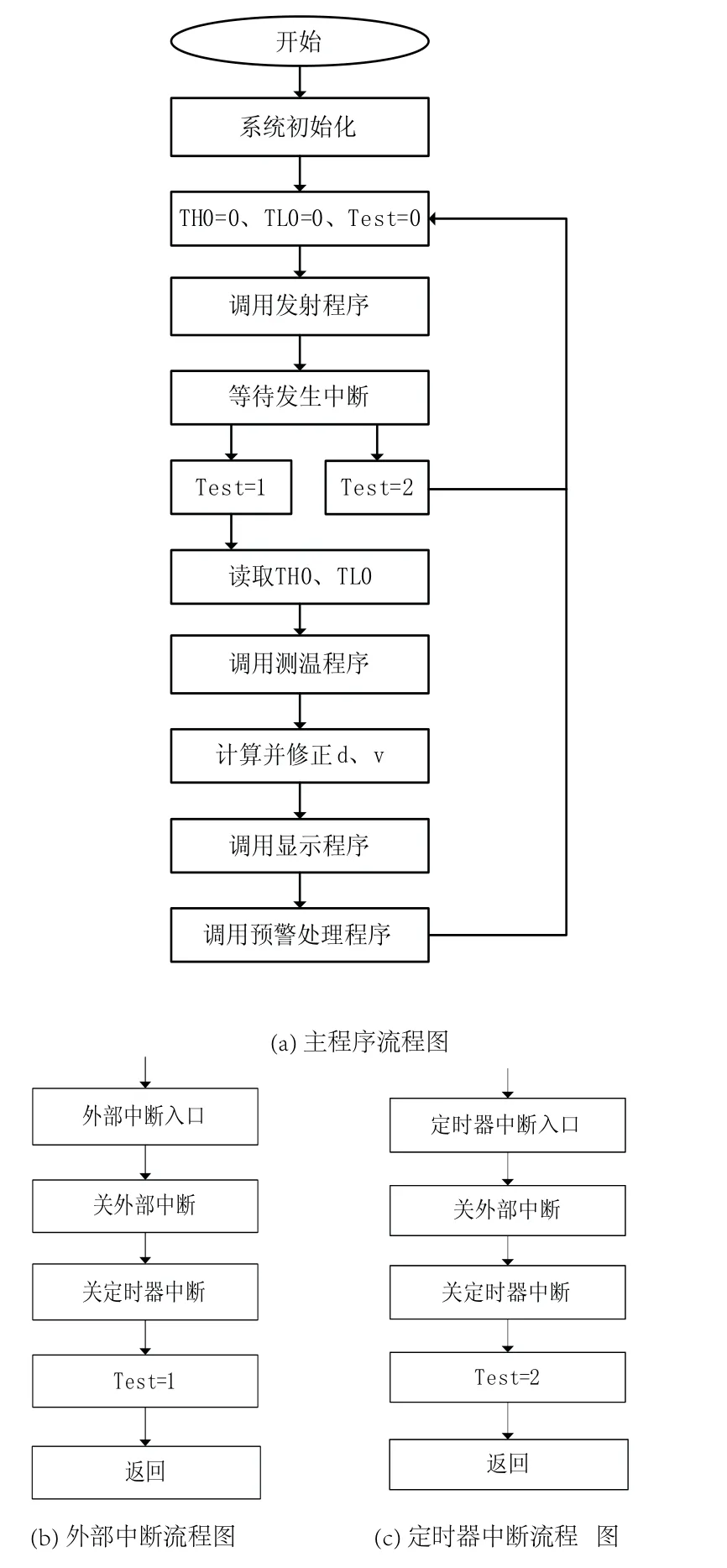
图9 系统软件流程图
4.2 系统数据修正处理
超声波反射的回波有一定的离散性,为了克服偶然误差,得到更精准的测量结果,系统采用递推中位值平均滤波法对测量结果进行修正。该方法是采用软件滤波对数据进行修正:采用递推的方法对每个测距点连续采样N个数据,去掉一个最大值和一个最小值,然后计算N-2个数据的平均值作为该测距点的测量数据。这样的处理能够克服偶然引起的脉冲性干扰,消除脉冲干扰引起的采样值偏差,使测量数据更准确可靠[7]。
5 系统测试与分析
为验证设计方案和程序设计的正确性,对系统进行了仿真测试和硬件测试。
5.1 系统仿真及测试
5.1.1 Proteus软件介绍及仿真元件创建
Proteus是一款非常出色的EDA工具,能够对常见的元器件进行准确仿真。该软件和大多数仿真软件一样,可进行元件创建及层次原理图的设计。Proteus元件库中没有超声波发射和接收电路,故本文主要通过自制元件生成相应的电路。具体实现步骤如下:1)利用常用工具箱中的2D Graphics Line Mode和Device Pins Mode工具绘出整个线路连接图;2)利用Make Device工具将线路连接图组合成单一的元件;3)编辑元件的子原理图。
本系统的超声波发射接收模块元件如图10所示,其子原理图是由NE555组成的单稳型压控振荡器,如图11所示。当单片机发送40KHz的脉冲到NE555的2脚时,触发压控振荡器工作,此时3脚输出一定脉宽的方波,调节5脚电压可输出不同占空比,即实现了不同距离的调节。

图10 超声波发射接收电路线路图
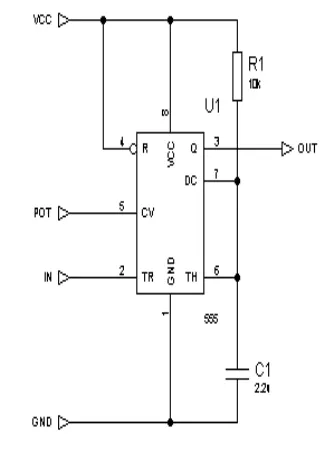
图11 超声波发射接收 电路的子原理图
5.1.2 系统仿真测试
系统仿真如图12所示,调节图中的RV1可实现模拟不同距离的测量。
仿真测试实现了:1)环境温度的实时测量及修正;2)两车间距离、相对速度的显示;3)根据距离与相对速度判断车辆是否在安全范围内,并给出相应的声音报警和LED提示。

图12 系统仿真原理图
5.2 系统硬件测试与分析
根据设计方案设计了如图13所示的实物,并进行不同距离和相对速度的测试。测试结果表明:1)当距离大于5m且相对速度小于1m/s时,绿色LED亮,液晶屏给出安全提示;否则,液晶屏给出危险提示,并且红色LED闪烁、蜂鸣器发出报警。2)实际距离越大,偏差越大。在10m范围内测量数据较准确,能很好地提醒驾驶员安全驾驶,超出10m系统误差大。
报警系统与障碍物的实际距离较大时,反射的回波较弱,容易受周围环境影响而导致偏差较大,但相对误差较小。

图13 系统实物图
6 结束语
本文设计的汽车防撞报警系统采用AT89C51为主控器,实现了实时的超声波测距、测速,并将所测距离和相对速度显示,同时系统根据距离和相对速度判断汽车是否在安全范围内,若不在安全范围内系统将进行声音报警和LED状态提示。系统进行了Proteus仿真和硬件测试,验证了系统的可行性和可靠性,此外,系统成本低,使用方便,能有效提醒驾驶员小心、安全驾驶,避免汽车相撞事故的发生,具有较大的实用价值和市场价值。
[1] 王业琴.基于AT89C52单片机的煤矿电机车防撞预警系统设计[J].煤矿机械,2013,34(3):248-250.
[2] 卜英勇,王纪婵,赵海鸣,等.基于单片机的高精度超声波测距系统[J].仪表技术与传感器,2007,(3):66-68.
[3] 李录锋.基于AT89C51超声波测距控制系统设计[J].制造业自动化,2012,34(4):45-47.
[4] 秦伟,颜文俊.基于CX20106A的超声波倒车雷达设计[J].压电与声光,2011,33(1):161-164.
[5] 苏炜,龚壁建,潘笑.超声波测距误差分析[J].传感器与微系统,2004,23(6):8-11.
[6] 袁佑新,吴妍,刘苏敏,等.可视汽车倒车雷达预警系统设计[J].微计算机信息, 2007,23(5):268-270.
[7] 张俊.匠人手记[M].北京:北京航空航天大学出版社,2008.
