高精度GPS/GIS定位技术在机动车道路考试系统中的应用研究*
2013-08-21吴业福潘世刚吴超仲
吴业福 潘世刚 康 壮 吴超仲
(1.武汉理工大学计算机科学与技术学院 武汉430063;2.武汉理工大学水路公路交通安全控制与装备教育部工程研究中心 武汉430063)
0 引 言
目前有少量的计算机化的科目三路考系统投入使用。但是现有的科目三路考系统缺少对骑压中心实线、长时间骑压车道分界线、靠边停车时车身与右边缘线距离是否大于30cm等与车辆位置有关的评判项目的自动评判。究其原因是系统无法精确、实时显示考试车辆的位置。GPS/GIS利用实时动态差分法(RTK)技术,定位精度可达分米级[1],从而给现有路考系统与车辆位置有关的项目的自动评判提供了1种有效地解决途径。国家道路安全行动计划项目(课题编号:2009BAG13A05)支持开发的新型科目三路考系统中,使用厘米级精度的GPS/GIS实现了与车辆位置有关的评判项目的自动评判。
本路考系统分为考试中心监控部分和车载端自动评判两部分[2]。考试中心监控部分安装在考试中心服务器上,车载端GPS/GIS评判部分安装在考试车工控机上。考试中心实现对考试车辆轨迹和考试过程的全程监视。车载端采集高精度的GPS位置数据,并实时与高精度的考试道路GIS数据进行拓扑关系运算,判断出考试车辆与道路标线或者特点区域位置关系,从而精确、实时确定考试车辆所处位置,进而实现相关考试项目的自动评判、车辆行驶方向的自动导航提示和车辆轨迹监视等功能[3]。
1 高精度GPS/GIS定位技术
GPS定位信息定位的基本原理为:利用空间距离后方交汇法以GPS卫星瞬时位置作为已知数据,解算待测点的空间坐标[4]。目前1个GPS的单点定位精度在15m左右[5]。因此,仅仅简单的利用GPS的单点定位实现机动车道路考试系统是不现实的,因为机动车定位精度要求远远达不到要求。为了解决这个问题,系统采用了1种更加精密得测量技术——载波相位差分技术(real time kinematic,RTK)。RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果[6],并达到厘米级精度。在RTK作业模式下,高精度的GPS测量采用载波相位观测值,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不到1s。
本系统的高精度GPS采用RTK技术。定位设备分为基站和流动站。基站架设在车管所楼顶,基站GPS采用的是TRIMBLE R8GNSS系统。除此之外,基站还配置有电台和避雷针。流动站GPS采用的是TRIMBLE 5700,该GPS接收机架设在车顶上,并且处在车辆4个轮子构成矩形的对角线中点。基站系统采用西安80坐标系。R8加上5 700的组合能使RTK精度达到2~6cm。
2 车辆位置精确定位的实现
机动车道路考试系统通过使用高精度GPS/GIS技术,实现对车辆的实时监控。系统将高精度GPS定位信息,与高精度GIS电子地图结合在一起,以图片、文字、位置状态量等形式实时描述出车辆具体位置和当前状态。通过这些位置信息,考试监控中心的监控人员可以实时观测到考试车的运行及进行车辆信息的查询,车载端评判系统可以实时进行与车辆位置相关考试项目的自动评判、车辆行驶方向的自动导航提示。系统的GPS/GIS模块最重要的技术是车辆形状建模、车辆行驶方向判断模型的建立以及GPS/GIS评判模块的实现。
2.1 车辆形状建模
要利用高精度GPS/GIS判断车辆位置关系,首先需对车辆形状进行合理建模。车辆外轮廓可以看做1个规则的矩形,而矩形长和宽的选取直接影响着系统评判的准确程度。在与车辆位置有关的评判项目中,与车辆矩形宽有关的评判项主要涉及到车辆的压线判断,比如压中心实线或边缘线等。车辆宽度即使有1cm误差就也对评判结果产生影响。而与车辆矩形长有关的评判项则是涉及所在区域的判断,比如禁止停车区域等。本系统采用车辆4个轮子外侧的中心点连接而成的矩形框作为车辆的外部轮廓。如图1所示,取车轮外侧中心轴线垂直向下,并与地面刚好接触的一点作为测量点,前后2点的连线长度作为车长,左右2点的连线长度作为车宽。这4点构成车辆矩形,GPS接收机则需放置在矩形的中心点。在实地测量车辆外形数据时,确定好4点后车长和车宽可以直接通过皮尺进行车辆,而GPS接收机位置相对麻烦。GPS解算的定位数据正式GPS接收机的坐标,所以GPS接收机位置的偏移会严重影响评判结果。系统通过定位4个车轮垂直与水平方向的中心点,将其作为GPS接收机位置。

图1 车辆矩形长宽及GPS接收机Fig.1 The position of the GPS receiver assembled on the vehicle
2.2 车辆行驶方向判断
系统的车载端GPS接收机采用天宝公司的Trimple 5700。该GPS属于单天线GPS,只能定位车辆位置坐标,而无法获取车辆当前朝向。在中心点确定的情况下,车辆的朝向的变化会使车辆轮廓矩形错位,从而直接影响着车辆信息的精确定位。当车辆运动时,可以通过前后两点的坐标值来确定车辆行驶方向。而车辆矩形的长和宽可以通过定位关键点得到。通过中心点坐标、车长、车宽和车辆方向,就能确定车辆矩形四个顶点的坐标值。
虽然本系统RTK精度只有2~6cm。但当车速过慢时,GPS误差带来的巨大影响就会凸显出来。如图2所示,A车以3.6km/h的速度行驶,B车以36km/h的速度行驶。黑色箭头为A车和B车行驶方向。系统采用的GPS为10Hz,即0.1s就有1条GPS数据发送过来。A车0.1 s可以行驶0.1m,假设 A车0.1s走到了(X1,Y1)点,由于GPS存在这几厘米的误差,接受到的坐标变成了(X1,Y1-Δd)。式中:Δd为偏移量。同样,B车1s可以行驶1m,B车走到(X2,Y2)点,而实际接受到坐标变为(X2,Y2-Δd)。由于误差的影响,A车与B车的方向与实际方向都有偏差。由图2可见,A车方向偏离的程度大于B车。一般来说,误差值一定的情况下,速度越快的车辆0.1s内行驶距离越长,误差对车辆方向的影响就越小。因此,几厘米的误差对快速行驶的车辆来说可以忽略不计,而对与刚起步或是靠边停车阶段的车辆来说,会引起车辆方向的偏移,从而严重影响对车辆是否压线或是离道路边缘线距离的判断。

图2 车速对车辆方向的影响Fig.2 The effect of the vehicle’s direction with the vehicle’s speed
为了在现有设备,现有精度的前提下提高系统评判的准确性,系统采用了取平均值的方法来确定车辆行驶方向。如图3所示,系统用数组记录本条GPS数据之前的4个坐标值,分别计算出每2点之间方向角度,然后对这些角度取平均值,得到车辆的平均方向作为车辆矩形的方向来进行评判。经过实地测试,仅仅采用2点作为车辆方向时,车速较慢时系统误差在0~20cm,而取平均方向时,系统误差在0~10cm。实验证明取平均方向的方法大大提高了GIS评判模块的准确性,如图3所示。

图3 车辆平均方向Fig.3 The average movement direction of the motor vehicle with the vehicle’s speed
2.3 GPS/GIS定位相关评判模块的实现
GPS/GIS定位相关的评判模块在车载端评判系统中起着非常重要的作用。与GPS/GIS定位相关的评判项主要分为2类,一类以GPS/GIS数据作为主要评判依据的评判项,另一类是以GPS/GIS数据作为辅助判断依据的评判项。第一类评判项主要与骑压道路线的判断有关,比如“车辆行驶中骑轧车道中心实线”。“车辆行驶中骑轧车道中心实线”项目的评判流程见图4。
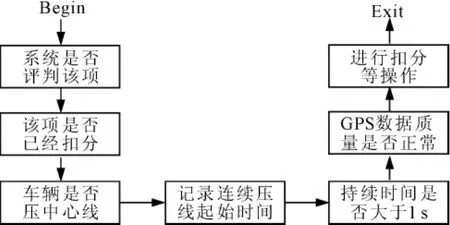
图4 “车辆行驶中骑轧车道中心实线”评判流程Fig.4 The evaluation process that the vehicle cross the road center line
评判项目“车辆行驶中骑轧车道中心实线”的关键评判代码如下:

第二类评判项主要与车辆行驶区域有关。首先GPS/GIS模块定位出车辆所在的区域。当考试车进入特定区域时,系统获取考生动作或车辆动作信息后进行进一步综合评判。比如对于评判项目“在学校区域不观察左、右方交通情况”,评判模块不仅仅需要高精度的GPS/GIS定位信息,还需要头部运动图像处理数据:是否观察左、右方交通情况。其评判代码更复杂。
2.4 系统运行效果
科目三路考系统已经在浙江、广东等10个城市示范应用。车载端GPS/GIS模块能为道路考试系统提供如下考试项目所需的车辆位置定位信息:考试车辆所在车道,是否行驶或停放在人行横道区域、交叉路口、学校区域、公共汽车站区域,是否行驶或停放在山区、涵洞、隧道、弯道、陡坡、高速公路等路段,当前道路限速值,考试车辆距离道路中心实线(双黄线、单黄线、白实线)的值、考试车辆距离道路右侧边缘线的值等。通过运用这些车辆位置定位信息配合其他传感器实时数据,可以完成以下与车辆位置有关的评判项目的自动评判:车辆行驶中骑轧车道中心实线或者车道边沿实线、停车后车身超过道路右侧边缘线或者人行道边缘、停车后车身距离道路右侧边缘线或者人行道边缘大于30cm、将车辆停在人行横道网状线内等禁止停车区域、长时间骑轧车道分界线行驶、通过路口前/人行横道/学校区域/公交车站未减速慢行、通过路口前/人行横道/学校区域/公交车站不观察左、右方交通情况等。
图5是采用高精度GPS/GIS技术实现的与车辆位置有关的评判项目的自动评判结果及车辆运行运行轨迹。图中显示出了与车辆位置有关的评判项目的实时扣分信息和扣分位置。

图5 车辆运行轨迹和实时扣分监控界面Fig.5 The monitoring interface of the vehicle running track and real-time deductions
3 结束语
GPS影响车辆位置精度的客观因素有很多,比如天气、楼房遮挡、卫星状态、地图误差等等[2]。本系统对GPS/GIS模块进行了系统测试。利用测试界面观察车辆状态值,与实际情况进行对比,记录每次观察结果。当车辆靠边停车时,用标尺测量车轮与边缘线距离,并按时间、天气进行记录和分析。除此之外,还进行了不同地方不同天气的测试,分别在武汉理工航海楼和嘉兴进行了长达3个月的测试。测试期间遇到了晴天、雷雨、多云、雪天等多种天气,也经历过不同高度楼房遮挡下。经过实地测试和分析,车辆压线判断的整体精度在0~10cm内,GPS/GIS相关评判项的准确率为99%,满足了机动车道路考试系统评判的基本需求。
虽然GPS/GIS较准确实现了车辆位置信息的判别,但相对来说成本较高。如果使用陀螺仪将会大大降低系统成本。陀螺仪通过测量载体的角速度,进而计算得到物体的运动姿态,惯性导航系统中的陀螺仪用来形成1个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度,再对时间的1次积分从而得到速度,速度再经过对时间的1次积分即可得到距离,即可通过这种方法获得车辆的行动轨迹。使用陀螺仪来进行高精度的车辆位置定位和考试项目评判,涉及到安装、寿命和精度等问题,这也是今后研究的方向。
[1] 王广运.载波相位差分GPS定位技术[J].测绘工程,1999,8(1):12-14.
[2] 贺 宜,吴超仲,吴业福.一种机动车驾驶人道路考试智能评判监测系统[J].交通信息与安全,2011,29(1):93-95.
[3] Wu Yefu,Li bo,Wu Chaozhong.Real-time automatic evaluation technology in vehicle road test system based on neural network[C]∥Wuxi,China:published by CPS,International symposium on distributed computing and Applications for Busineses Engineering and science,2011.
[4] Burrough P A,McDonnell.Principles of geographic information system[M].New York:Oxford University Press,1998.
[5] Shree S.Applications of geographical information system(GIS)for spatial decision support in aquaculture[J].Aquacultual Engineering,2000(23):243-245.
[6] 张照杰.网络RTK定位原理与算法研究[D].济南:山东科技大学,2007:24-28.
