一种小型无人机的导航系统方法设计
2013-08-20丁梦雨芦利斌金国栋
丁梦雨 ,芦利斌 ,金国栋
(第二炮兵工程大学907教研室,陕西 西安 710025)
近年来,小型无人机(Mini-UAV)技术达到了迅猛发展,由于其结构简单、体积小、重量轻、机动性好、成本低、便于隐蔽等特点,使得小型无人机在军事和民用领域得到越来越广泛的应用。小型无人机的地面控制系统,即地面站GCS(Ground Control Station),是小型无人机的重要组成部分。它是小型无人机系统的指挥控制中心,可以实现对超小型无人机的监视、导航和控制,从而完成既定的任务。
小型无人机地面导航系统(以下简称导航系统)作为整个地面站系统的一个子系统,承担的主要任务是精确确定无人机在空间中的位置,能够进行航迹的实时显示及航拍图像的回放,并且使无人机能够实现既定航线的跟踪。针对某型小型无人机自身任务的特殊需求,对导航控制系统进行了全新的设计。
1 导航系统组成
小型无人机的导航系统一般由3个部分组成:微处理器、GPS以及空气数据传感器。微处理器是数据处理和飞行控制的核心部分;GPS部分可以选择性地过滤接收到的GPS信息,再将接收到的各类信息通过串口传输给微处理器,使其能够进行导航运算;空气数据传感器则选择采用半导材料的大气压力传感器来为无人机驾驶提供外界数据。整个系统原理框图如图1所示[1]。

图1 导航系统原理图Fig.1 Navigation system principle diagram
2 添加图层
矢量地图比位图地图的资源内容更加丰富,其原因是矢量地图有多图层。图层的读入和显示是所有地图操作的基础,在程序中通过地图文件路径与文件名将地图数(位图文件)读入内存,并利用Windows中绘图工具将位图绘于指定区域(即地图显示区)[2]。部分核心代码如下:
3 确定地图工具的功能以及经纬度信息
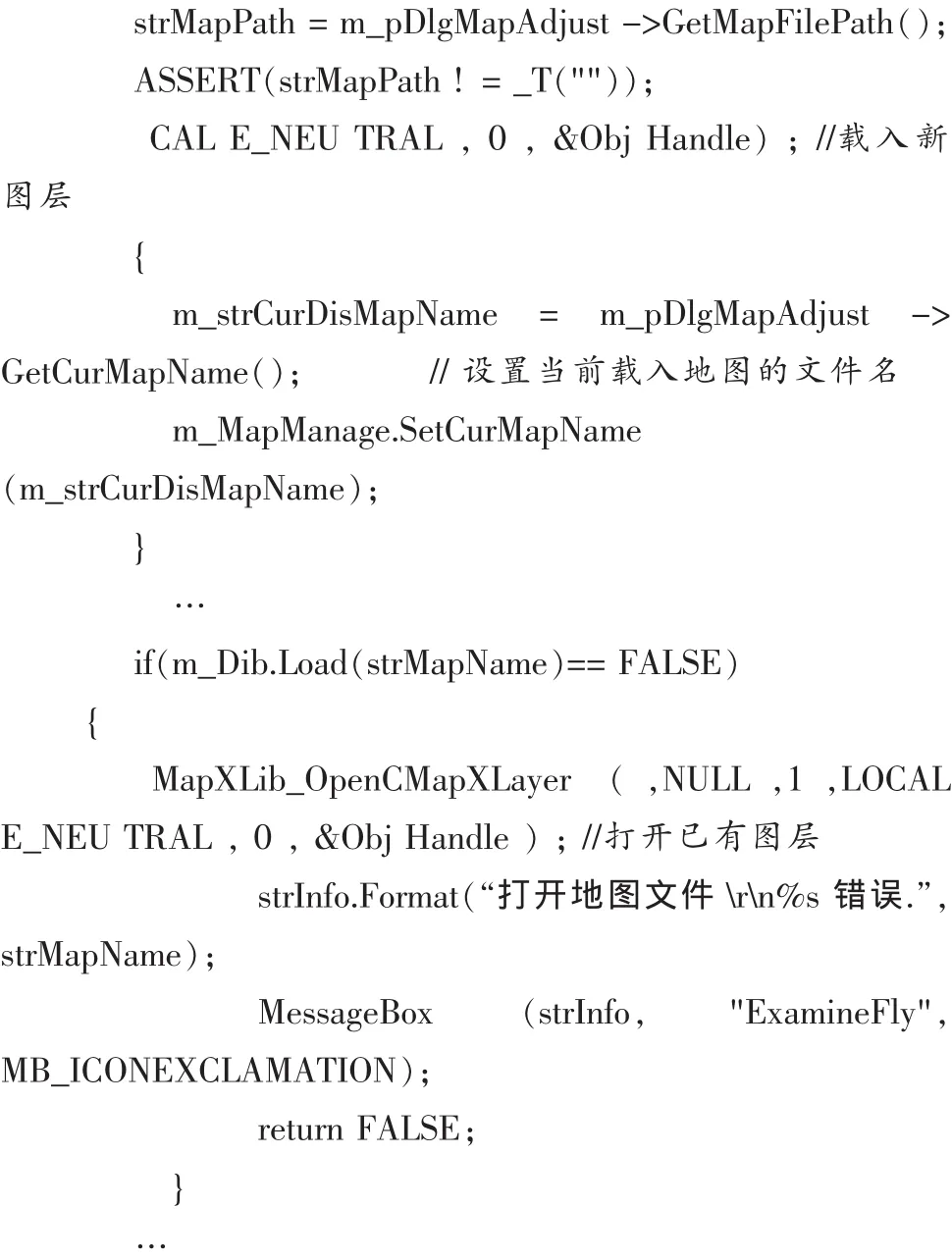
无人机地面站的地图工具的基本功能是指地图的指示箭头、放大和缩小、漫游和选择。无人机在发回给地面站的遥测信息中包含GPS定位信息,经过处理后可在二维地图里显示出无人机的实时位置。在地图操作时,若能显示用户操作的实际地理坐标,能够给用户提供指导信息,以便确定新添加的航路点位置。GPS采用的是世界大地坐标系(WGS-84),坐标原点是地球质心,z轴指向 BIH1984.0定义的协议地极CTP(Coventional Terestrial Pole),其 x轴指向 BIH1984.0 的零子午面与CTP相应的赤道的交点,y轴与x轴、z轴构成右手坐标系,如图 2 所示[3-10]。
图2 WGS-84坐标系Fig.2 WGSs-84s fastens by mark
地图功能和经纬度信息的实质是在GPS坐标系和显示器屏幕坐标系中建立相应的关系。屏幕坐标系是以显示像素作为绘图单位,通过计算地图上两个配准点之间的经、纬度差和屏幕坐标、方向上两点之间的像素差,定出实际距离与显示设备坐标的比例关系,就可以计算出每一个像素相当多少经度或纬度,根据他们的相对距离的差值就可以根据配准点计算出某一点的位置坐标[4]。在实际的地图绘制过程中,由于受屏幕显示器区域的限制,地图只有部分会被显示,若想观察未显示的部分则需要移动显示区域,此时,屏幕坐标与地图坐标是不相同的。如果是从屏幕坐标获得地图坐标或还需要进行一次坐标的转换。其原理比较简单,只需要使地图坐标等于屏幕坐标与移动坐标之和。
部分核心代码如下:

经过地图配准后,通常采用Windows中图形设备接口GDI(Graphics Device Interface)通过寻找屏幕坐标进行点线的绘制实现飞行航迹显示、航点预定和航迹规划。
4 航路规划
地面站导航系统的航迹规划、回放功能可以直观的反映出无人机的飞行状态,下面对航迹规划功能进行说明:用户单击“航点规划”后,即控制客户图层绘制的标志量,再点击刷新图层,准备接收用户鼠标点击的航点坐标,随后在MapX的鼠标弹起消息处理函数时进行以下操作:鼠标左键弹起一次,表示确定一个航点,依此类推。在记录规划航点数目变量的同时,将新的航点坐标存储到经纬度数组相应的存储单元,同时移动鼠标,指针所指位置的经纬度将实时地显示在状态栏里,以便用户进行查看。但是需要注意,在每次确定新航点后,都必须立即刷新客户图层,并将当前所有航点按编号次序连接成一个闭合的多边形,以便让用户参考的航迹是符合航迹规划的。若完成本次规划,单击“规划完毕”菜单,航点将立即被编码、发送;若放弃本次规划,单击“取消规划”菜单;若对已规划的某个航点位置进行修改,单击“修改航点”。
航迹规划是基于绘制客户图层以开关变量控制不同任务的重要导航子系统,在实际应用中发挥着至关重要的作用。
5 运行测试结果
通过实验室测试和户外飞行试验,表明该小型地面站的导航系统能够正常工作,下面给出实验室测试结果,如图3所示。
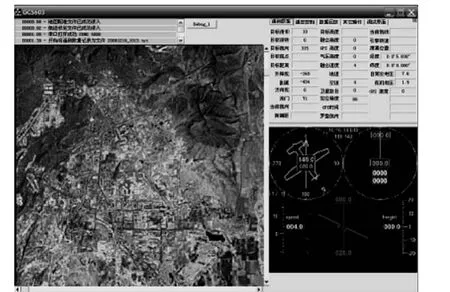
图3 导航系统运行结果Fig.3 Navigation system circulates a test result
由于实验室条件的限制和测试项目的选择,并不是所有的数据都能显示出来,所以图3中一些数据栏并没有显示数据,如高度标尺等没有显示。
6 结束语
文章主要讨论了导航系统组成、图层的添加、确定了地图工具的功能以及经纬度信息以及航路的规划。通过地图配准建立了GPS定位信息与屏幕显示坐标之间相互对应的关系,然后根据寻找屏幕坐标进行点线的绘制实现飞行航迹显示、航点预定和航迹规划,并给出相关内容的部分核心代码。
[1]楼超英,张鹏翼,李南翔.一种小型无人机导航系统的设计[J].科技资讯,2006(33):31-32
LOU Chao-ying,ZHANG Peng-yi,LI Nan-xiang.Design of the navigation system method for a small UAV[J].Science&Technology Information,2006(33):31-32.
[2]吴成富,王睿,陈怀民,等.无人机导航地面站软件研究[J].机械与电子,2009(4):7-9.
WU Cheng-fu,WANG Rui,CHEN Huai-min.Studyon software of UAV navigation ground station[J].Machinery&Electronics,2009 (4):7-9.
[3]李明峰,冯宝红,刘三枝.GPS定位技术及其应用[M].北京:国防工业出版社,2006.
[4]龚真春,宋执环,李平.超小型无人机GPS导航中的坐标转换[J].兵工自动化,2005,4(24):29-30
GONG Zhen-chun,SONG Zhi-huai,LIPing.Coordinate transform and its application in GPS navigation of SUVA[J].Ordnance Industry Automation,2005,4(24):29-30.
[5]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003:394-396.
[6]李明峰,冯宝红,刘三枝.GPS定位技术及其应用[M].北京:国防工业出版社,2006.
[7]YANG Hui,CHENG Zhi-ping,XU Shan-jia,etal.An unmanned air vehicle (UAV)GPS location and navigation system [C]//InternationalConference on Microwave and Millimeter Wave Technology Proceedings,1998:472-475.
[8]Sun Xiaorong,Xu Chunguang,Wang Yongsheng.Unmanned space vehicle navigation by GPS[J].IEEE Aerospace and Electronics Systems Magazine,1996(7):31-34.
[9]Parkinson B W.Global positioning system:theory and application[M].USA:AIAA Inc,1996.
[10]赵琦,张晓林.基于Windows平台的无人机导航地面测试软件的设计[J].北京航空航天大学学报,2003,1(29):17-19.
ZHAO Qi,ZHANG Xiao-lin.Design of test software in base station for navigation under windows environment[J].Journal of Beijing University of Aeronautics and Astronautics,2003,1(29):17-19.