某雷达航迹仿真系统设计和实现
2013-08-20郭灵波李璋静
郭灵波 李璋静
(中国电子科技集团公司第二十八研究所 江苏 210007)
0 前言
系统仿真是一门综合性很强的新兴技术学科,它涉及多个领域的相关专业理论与技术,诸如系统分析、控制理论、计算方法和计算机技术。系统仿真是指通过对系统模型的试验去研究一个已经存在的或正在设计中的系统的过程。
计算机仿真具有精度高、重复性好、通用性强、价格便宜等多重优势。随着计算机硬件与软件的发展,计算机仿真技术也迅速发展起来,已广泛地应用于生产管理、工程技术、军事研究、科学试验、国民经济以及社会科学和自然科学等各个领域,其效果是十分显著的。特别是在重大国防武器系统研制或者关键技术的研究中,计算机仿真技术水平的高低将直接关系到它们的先进性、研制周期、经费开销,甚至关系到所研制系统的成败。
雷达航迹仿真技术是计算机仿真技术与雷达技术相结合的产物,即在计算机上通过软件建立数学模型,复现雷达 航迹产生的动态过程。根据实际需求,调整数学模型及其参数并不断完善系统,无疑将大大节省人力和物力,缩短研制周期。本文提出了一种雷达航迹仿真系统是以数学建模为核心,研究并解决了系统建模、仿真运行、可视化、通信及其实现等一系列方法和技术。
1 仿真系统组成
1.1 系统物理组成
基于高层体系结构(HLA)技术构建的仿真系统由联邦控制成员(对空雷达模拟器、对海雷达模拟器、飞行姿态模拟器和剧情模拟器等)、仿真资源数据库和航迹综合显示席位等组成,如图1所示。图中TCP为传输控制协议,IP为网络互连协议,RTI为运行时支持系统。

图1 仿真物理结构
应用HLA架构雷 达航迹仿真环境,解决了仿真环境中多个仿真器(联邦成员)间互操作性问题,提高仿真器的复用性。
1.2 系统软件架构
将雷达航迹仿真系统分解为实现不同功能的联邦成员,每个联邦成员实现系统的一部分功能。各联邦成员之间的数据传输和交互完全由仿真平台来解决,通过联邦成员之间的互操作实现系统整体的功能。在实现每个联邦成员功能时,仅需考虑和其他联邦成员的接口关系,联邦成员内部功能具有封装性。这样的仿真开发模式不仅使仿真系统的开发变得简单灵活,并且开发出来的仿真系统具有极大的扩充性和重用性。
雷达航迹仿真系统软件总体功能模块如图2所示。
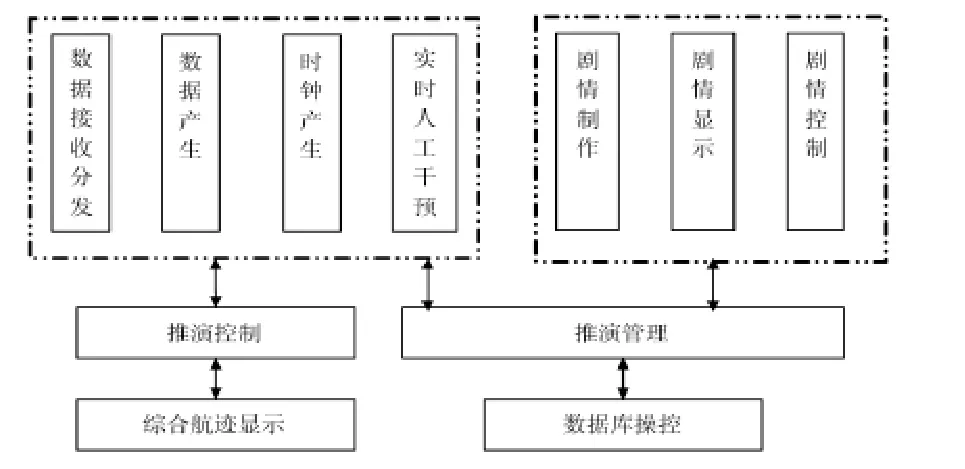
图2 仿真软件架构
数据产生模块是其中的核心模块,此模块根据剧情的部署情况及其航路规划,通过交互多模型(IMM)及多普勒跟踪滤波等算法实现对目标的稳定跟踪与管理,产生模拟目标航迹信息。它主要由三部分组成:跟踪管理类,用于对目标跟踪计算的类进行管理并提供输出接口;目标跟踪计算类,每一个待跟踪的目标对应一个该类型的对象,在目标录取成功后由该对象分配其空间;滤波计算类,用于外推目标航迹,当用点迹目标进行录取时,如果录取成功,在数据进行检测凝聚后,按扇区方式进行目标的跟踪计算及其显示输出。推演管理模块对当前模拟推测进行干预,包括开始、暂停、恢复和步长控制等;推演控制模块对目标数据进行控制操作,包括目标消失、分批、合批、定向定速等。
2 仿真系统建模
2.1 目标状态方程
本系统仿真基于目标状态方程来产生雷达航迹的基础数据,利用最优控制理论,考虑目标的运动特性以及目标运动过程中的误差。目标运动状态方程表示为:

其中,F(tn),G(tn),C(tn),D(tn)为随时间变化的系统矩阵,H(tn)为量测矩阵,W(tn)和V(tn)分别为系统噪声矢量和测量噪声矢量,且都是均值为零,方差分别为σw,σv的白噪声。
当利用目标运动的状态方程进行航迹模拟时,首先对上述状态方程进行分析,如果x(tn)和u(tn)已知,那么x(tn-1)唯一确定。以此类推,当任意起始条件x(k)和控制序列{u(k),u(k+1),…}固定时,目标状态方程的解存在并且唯一确定。其解表示如下:
x(k)=F(k-1)…F(1)F(0)x(0)+G(k-1)u(k-1)+F(k-1)G(k-2)u(k-2)+…+F(k-1)…F(1)G(0)u(0)。
2.2 目标仿真控制
因为在雷达目标航迹模拟中,一般可知目标的起始点和终止点,根据目标状态方程,可以求出控制序列。考虑最优控制理论中起始点和终止点已知情况,假设:

经过适当的矩阵变换计算后,可求出控制序列u(0),u(1),…,u(k),即可实现航迹的模拟控制。
在航迹推测过程中,系统根据仿真雷达扫描得到数据信息,获得当前目标的坐标、航向和速度信息,将当前目标位置作为新的起始点重新推算,同时更新之前的统计数据。对于任意一个正在跟踪的目标,如果其跟踪质量下降到一定程度,系统将自动删除该目标及其相关显示信息。同时用户也可实时删除指定的任意一个或全部目标,跟踪及航迹显示也将相应地自动调整。
3 仿真关键技术
3.1 高层体系结构
高层体系结构(HLA)属于分布交互仿真技术范畴,其目的是解决绝大多数仿真器的应用实现较为独立,仿真器之间的互操作性和重用性差,开发维护和使用费时且成本高,有效性、可验证性和置信度较差等问题。分布交互仿真技术以计 算机网络为基础,把分散在不同地点的软硬件设备及有关人员联系起来,生成人工合成的这样一种电子环境。
分布交互仿真系统除了具有分布性、交互性的特点外,还有以下特点:
3.1.1 实时并发性
接入的仿真系统都要求实时,要能实时传送人工干预信息,对分布在不同地点、不同层次的仿真对象进行并发运行,实现时空一致性。
3.1.2 灵活性
系统功能可按模块结构单元分割,系统单元可容易地从系统网络中移出或加入,易于动态管理,组合成不同的仿真任务。
3.1.3 可靠性
系统按功能分割,各子模块或子系统可靠性容易保证,当某一部分出现故障时,不影响整个系统。
一个典型的分布交互仿真软件体系结构如图3所示。
3.2 航迹转弯点平滑处理
在航迹模拟数据产生中,目标运动状态在转弯时需要平滑处理,在建立目标运动模型的基础上,根据目标的运动特性产生出理想航迹。目标并不是刚好到达转弯点处才开始机动,往往是在距离转弯点一定距离开始的。因此,用转弯半径R来描述目标在转弯处的运动特征,若目标的运动速度为v,转弯时的坡度为β,当地的重力加速度为g,则目标转弯半径R的计算公式如下:

图3 仿真软件体系结构图
R=v*v/g*tan(β),
依据经验,β一般取π/4,此时,速度与转弯半径的关系如下表:

表 1 目标速度与转弯半
转弯点的雷达航迹经过平滑处理后,目标航迹以转弯角平分线上的某点为圆心,绕转弯点作圆弧运动的平滑曲线。
3.3 随机二维正态数据生成
雷达在探测过程中由于受到自然界的干扰,以及设备精度的影响,探测得到的量测信号是带有一定噪声的随机变量,这些随机变量是均值为零,特定方差的高斯白噪声,因此,模拟雷达航迹应该在理想航迹数据的基础上加上测量噪声,其公式如下:

4 总结
对雷达航迹的目标状态进行了仿真建模,考虑到目标转弯时的运动特征,对航迹进行了平滑处理。该建模方法实现了雷达航迹的功能级仿真,形成雷达探测情报,为雷达情报处理中心提供了功能级的信息源数据。结果表明,在验证和测试雷达情报处理功能方面具有应用价值。
[1] 王国玉,等.雷达电子战系统仿真与评估[M].国防工业出版社.2004.
[2] 徐学文,等.现代作战模拟[M].科学出版社.2001.
[3] 王惠刚.计算机仿真原理及应用[M].国防科技大学出版社,1994.
[4] 毛少杰,居真奇,李玉萍等.C4ISR系统仿真试验技术[M].军事科学出版社,2011.
[5] 楚威,雷鸣,崔鹏.仿真与C4ISR系统的集成[J].指挥信息系统和技术,2011.
[6] 邹月娴,肖先赐,韩春林.ESM环境计算机仿真算法及软件设计[J].电子科技大学学报,1995.
[7] 何友,修建娟,张晶伟,等.雷达数据处理及其应用[M].电子工业出版社,2006.
