石油钻机综合性测试实验装置研制
2013-08-12职黎光魏航信
职黎光,魏航信
(西安石油大学 机械工程学院,西安 710065)
现代石油机械的设计及制造是西安石油大学机械设计制造及自动化专业教学与科研的重点任务,也是石油院校的一个具有特色的专业方向。为满足教学和科研方面的需要,学校机械工程学院自主研制了新的石油钻机综合性测试实验装置和配套测试仪器。既满足了本专业本科生和研究生有关的实验教学,又成为一个功能较为齐全的科研平台,为更好设计和检测各种不同类型石油钻机的井架结构与钻机自动送钻方面提供了有效的方法和措施。
1 实验装置介绍
我们在ZJ-32 钻机1∶8 的模型基础上,增加了一套由计算机控制的电液伺服自动加载装置和由计算机控制的电液伺服自动送钻装置、交流变频自动送钻装置各一套,以及若干套配套测试仪器。使用时通过自行编制的系统软件在计算机上进行操作,数字化测试,可实时显示数据和曲线,测试数据既可以显示为数据列表,也可以显示为图形,并具有存储打印等功能。
该钻机实验装置的总体结构如图1 所示。
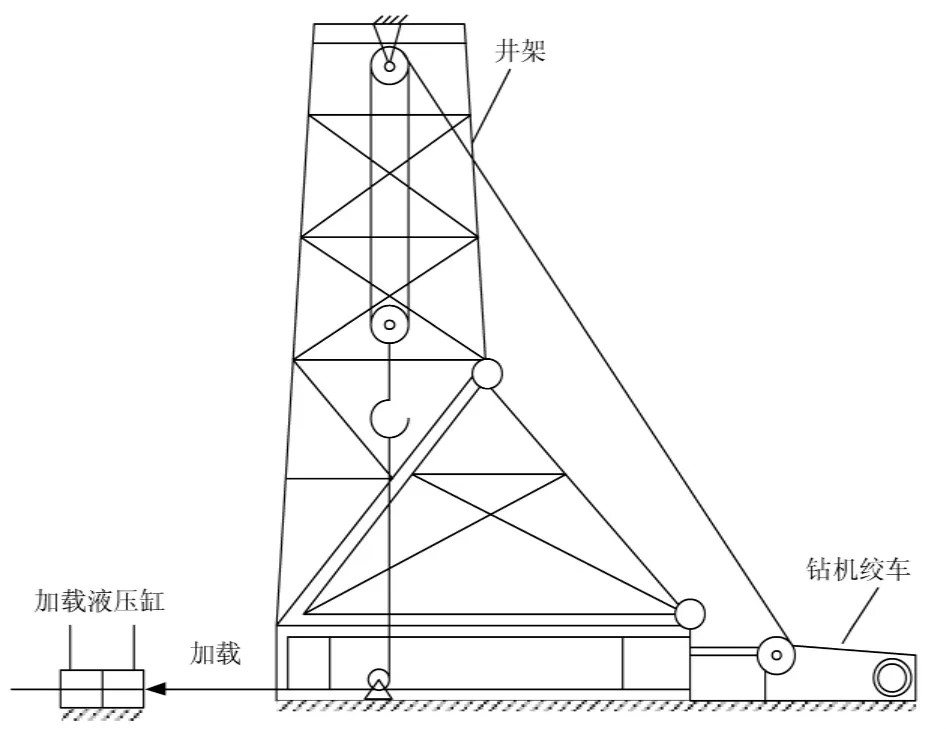
图1 钻机实验装置总体结构简图
由图1 可知,该实验装置是以一台可整体起升的塔形井架为主体并配备有动力系统、传动系统、提升系统、加载系统、自动送钻系统和底座所构成的综合实验装置。
2 实验装置的结构及特点
2.1 加载系统
加载系统的主要功能是为实验台提供模拟的大钩载荷。由于实际钻机大钩载荷随不同钻井工况而变,为了更好地模拟实际钻井工况,加载系统采用计算机控制电液伺服系统,系统工作原理如图2 所示。

图2 加载系统工作原理图
系统主要由计算机、D/A(A/D)转化板、伺服控制器、伺服阀、伺服液压缸、拉力传感器、液压油源和钢绳滑轮组成。
系统的工作原理为:通过计算机输入给定的加载信号,D/A 转化板将数字信号转换为模拟的电压信号输入伺服控制器,伺服控制器将电压信号转换成电流信号以控制电液伺服阀阀芯的动作,进而控制伺服液压缸活塞杆的运动,牵引钢绳对钻机大钩加载。安装在伺服液压缸活塞杆与钢绳间的拉力传感器把拉力信号转变为电压信号,利用A/D 板转换成数字信号,经串行通信口送入计算机,与给定的加载信号相比较,按一定的控制算法计算后调节控制信号的输出值,构成闭环控制,使大钩上的载荷与给定的加载信号一致。而加载信号的形式可根据需要随时变化,如恒定载荷、阶跃式载荷、正弦式载荷等多种形式。这样可以更真实地模拟钻井工况。为实时监控大钩载荷的变化,由数字显示器及时显示大钩载荷数值。
2.2 自动送钻系统
自动送钻系统有两种类型:(1)由计算机控制的电液伺服自动送钻装置;(2)交流变频自动送钻装置。受篇幅所限,只介绍类型(1),类型(2)见文献[1]。
电液伺服自动送钻装置安装在钻机绞车滚筒轴端的刹车机构上,刹车杠杆的运动受伺服液压缸的控制,系统工作原理如图3 所示。
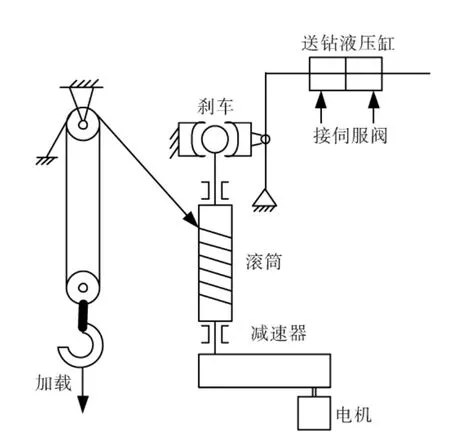
图3 自动送钻系统工作原理图
系统的具体结构与加载系统相同。信号采集由拉力传感器和称重仪组成,称重仪将拉力传感器采集到的大钩拉力信号,利用A/D 板转换成数字信号,一路通过串行通信口送入计算机,作为系统的反馈信号,另一路送到数字显示表,直接显示拉力值。电液控制部分由计算机、D/A 转换板、伺服控制器、伺服阀和伺服液压缸组成。
系统的工作原理为:当加载系统产生拉力载荷模拟井下钻柱载荷时,计算机将输入送钻信号与拉力传感器采集的拉力载荷相比较,按一定控制算法得出控制值,经D/A 转换板输入伺服控制器,伺服控制器将电压信号转换成电流信号以控制电液伺服阀阀芯的动作,进而控制伺服液压缸活塞杆的运动,拉动刹车杠杆,控制绞车滚筒的转动速度,使钻机在给定的送钻载荷下实现自动送钻[2]。
3 实验项目开发
3.1 井架强度、刚度、稳定性测试与分析实验
在钻机井架主要部件如底座、大腿、立柱、横梁、拉杆上贴应变片,选择不同加载型式对钻机加载,测出各点的动静态应力值,并分析不同载荷与井架强度、刚度之间的关系,验证理论计算和有限元计算的准确性,为钻机井架设计提供理论依据[3-7]。
3.2 井架整体起升应力测试
在钻机井架主要部件如底座、大腿、立柱、横梁、拉杆上贴应变片,将钻机井架整体放倒,用绞车起升将井架竖起,在起升和下放的过程中测出各点的动态应力值,验证理论计算和有限元计算的准确性,搞清井架起升过程杆件内力变化的规律。
3.3 钻机自动送钻控制实验
1)应用加载系统:掌握加载系统工作原理,了解加载系统的控制软件编制方法和控制算法的原理,能准确将不同类型、不同大小的力施加到钻机大钩上。测试加载载荷变化数据,验证加载系统的准确性和稳定性。
2)应用自动送钻系统:掌握自动送钻系统工作原理,了解自动送钻系统的控制软件编制方法和控制算法的原理[8-9],正确操作自动送钻系统,测试自动送钻系统输出载荷变化数据,验证自动送钻系统的准确性和稳定性。
4 实验测试与效果
本文以钻机自动送钻控制实验为例,将整台实验装置各个系统联合运行。首先,启动自动送钻系统,用送钻伺服液压缸制动刹车机构,使绞车不能转动,再启动加载系统对钻机大钩加载,产生模拟的钻柱载荷;然后输入希望的钻压值;同时,计算机开始采样,采样周期1 ms,控制算法根据偏差和偏差变化率输出控制量,使系统进行自动送钻实验。
实验加载载荷为20 kN 恒压形式,送钻载荷要求稳定在15 kN,进行送钻实验。同时为了比较不同控制算法对自动送钻的控制效果,分别进行一般模糊控制、自组织模糊控制算法的实验研究,结果如图4 所示。
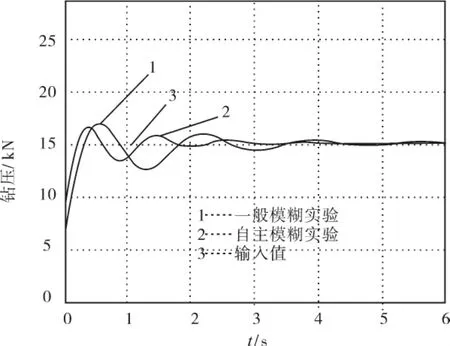
图4 自动送钻实验载荷曲线
实验结果表明,模拟实验系统工作稳定,能模拟实际自动送钻过程。一般模糊控制(曲线1)效果较差,最大超调24.7,最大稳态误差8.2,难以达到送钻要求。自组织模糊控制(曲线2)最大超调14.2,最大稳态误差3.8,峰值时间和动态调整时间分别为0.78 s 和2.7 s. 显然后者可满足自动送钻要求。完成这组实验后,实验人员可输入不同参数进行测试,检验自动送钻系统的稳定性和可靠性。
5 结束语
通过研制“石油钻机综合性测试实验装置”,改善了学校的实验教学和科研环境,经过几年的实验教学和科研实践,在该实验装置基础上不断开发出新的实验项目如“钻机振动测试及故障诊断”“各种拉压传感器、位移传感器应用实验”“电液自动控制实验”“交流变频器的应用实验”等[10-11]。并且开发出一种新型的“钻机变频控制装置”,已投入到油田使用,收到较好效果。
[1]魏航信,吴伟,职黎光. 变频驱动钻机自动送钻试验系统的研究[J]. 石油机械,2009,37(3):10-12,50.
[2]柳润青,朱小平. 石油钻机自动送钻控制系统研究[J]. 新技术新工艺,2008(12):89-91,3.
[3]马成刚,赖永星,刘敏珊. 载荷对石油钻机井架动力特性的影响分析[J]. 石油机械,2007,35(12):21-23.
[4]庄茁,由小川,廖剑晖,等. 基于ABAQUS 的有限元分析和应用[M]. 北京:清华大学出版社,2009:129-150.
[5]蒋薇,易先中,胡德祥.JJ225/42—KG 型石油钻机井架结构强度分析[J]. 石油机械,2012,40(2):22-25.
[6]胡朋,齐明侠. 半潜式钻井平台上钻机井架振动分析[J]. 石油机械,2010,38(11):1-4.
[7]谢占魁,谢锐. 动态应力测试实验装置的研制和实验项目的开发[J]. 实验技术与管理,2009,26(10):29-31.
[8] 胡寿松. 自动控制原理[M]. 北京:科学出版社,2007:28-56.
[9]阮毅. 运动控制系统[M]. 北京:清华大学出版社,2006:117-215.
[10]王定亚,孙娟. 交流变频钻机技术现状及发展建议[J]. 石油机械,2008,36(5):66-69.
[11]陈棣湘,潘孟春. 电工技术综合性实验的设计[J].实验科学与技术,2011,9(4):120-122.
