光线示波器的CCD 图像采集与处理研究
2013-08-12王锁明朱二旷
王锁明,侯 彬,朱二旷
(1. 燕山大学 理学院,河北 秦皇岛 066004;2. 东北石油大学 秦皇岛分校,河北 秦皇岛 066004)
随着CCD(电荷耦合器件)高速成像技术的不断发展,频率高、数字化的新型CCD 相机不断出现。结合相应光学系统的CCD 成像探测器可以对目标进行实时的观测和记录,提供各方面的相关信息进行分析、考察和使用[1]。CCD 器件及其应用技术在图像传感和非接触测量领域得到了广泛的应用。
对于光线示波器,由于光线光点的运动速度非常快,利用肉眼和普通相机进行追踪非常困难,使光点振荡信息的揭示有一定难度。但是,高速CCD 成像技术与计算机技术的结合,取代了激光点成像中的底片,避免了显影和定影的繁复操作过程,可以快速方便地实现波形再现的目的,同时也可达到对高速运动的激光光点进行快速跟踪拍摄的目的,这对激光光点运动规律的研究与揭示具有非常重要的意义。
本文拟以高速CCD 相机拍摄回来的图像集作为数据源,对图像进行一些关键性的处理。为了更好、更形象地对激光光点的运动轨迹进行完整拟合,在常规图像处理方法的基础上提出了基于CCD 光迹捕捉的图像叠加处理方法。
1 获取激光光点图像原理
光线示波振荡系统的装置结构如图1 所示。图中电磁振荡系统在周期性信号(由A、B 端输入)的激励下,振子可以在竖直面内以摆幅θ 角振荡,利用振动子偏转反射的光束在感光记录纸上记录一个或多个参数的瞬时值,以确定其波形。被测参数可为电流或电压等电量,或为已转变为电量的各种非电量,例如在机械工程中与应变片配合使用时,可测应力、应变、扭矩和振动等。光线示波器用光束记录,光束无惯性,光记录无摩擦,又可用增加光臂长度的方法来提高光学的放大作用。
2 图像处理
图像获取以后,由于外部环境和CCD 自身的原因,所获取的图像存在噪声的干扰,为了给后续的图像分析和图像理解奠定基础,在获取图像以后需要对所获得图像进行图像处理[2],即对图像进行各种加工以改善图像的效果,其主要目的是消除图像噪声、增强图像信息、消除非均匀性和改善图像质量等。
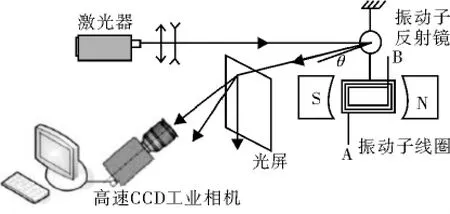
图1 光线示波器的测试系统
2.1 图像去噪处理
图像预处理使用的方法为图像平滑,这是一类简单但使用频率很高的图像处理方法。平滑处理的用途很多,常用于去除图像上的噪声或者减少线性失真[3]。图像的平滑处理视其噪声本身的特性而定,可在空间域或在频率域采用不同的措施[4]。一般情况下,在空间域采用中值滤波法对大多数类型的噪声就可以取得很好的效果,所以本研究采用中值滤波来消除噪声。
2.2 中值滤波
中值滤波是一种非线性的运算,对随机输入信号的严格数学分析比较复杂,但在确定性信号中进行中值滤波还是比较方便的,因为在实际运算过程中并不需要图像的统计特性[5]。其基本原理是:确定一个包含有奇数个像素的序列,按像素的灰度值从小到大或者从大到小排列起来,然后用中间灰度值来代替原排列的中间位置像素的灰度值。但考虑到一般图像在二维方向上均具有相关性,所以,采样窗口一般选择为二维窗口,其形状可以不同,如方形、十字形、菱形等。中值滤波最核心的问题是如何有效地选择一个最有可能代表领域特征的像素灰度,一般来说,邻域像素中灰度大小居中的点通常能很好地描述邻域的属性。因此,中心像素的灰度是通过对邻域内像素灰度排序然后取中值来确定的[6]。
实现算法:
1)确定某种结构的二维滑动模板,将板内像素按照限像素值的大小进行排列,生成单调上升(或下降)的二维数据序列。
2)二维中值滤波输出为:

其中,F(x,y)和G(x,y)分别为原始图像和处理后图像;W 为二维模板。
2.3 灰度变换
由于CCD 成像时可能存在曝光不足或过度,以及CCD 的非线性动态范围太窄等因素,使采集回来的图像存在对比度不足的现象,一些激光光点图像可能不太清晰。为了修补这种缺陷,在图像去噪之后,采用灰度切分(即将某个范围的灰度值突出,将其余的灰度值变为某个低灰度值)进行处理,增加图像的对比度,从而能使激光光点的图像更加清晰。
1)基本原理
假设源图像F(x,y)的灰度范围为[A,B],感兴趣的图像的灰度范围为[C,D](其中,A ≤C≤D ≤B),希望变换后图像G(x,y)中感兴趣的图像的灰度为M,背景图像的灰度为N。其关系式如下:

2)实现算法
(1)读入去噪后的图像,对该图像的像素灰度进行分析,寻找出灰度分布在区间[C,D]的像素。
(2)对图像进行灰度变换,变换后激光光点图像G(x,y)= M,背景图像G(x,y)= N。
在本次研究中发现,激光光点图像与背景图像的对比度越高越利于实现对激光光点图像特性的研究。所以,M 和N 的值分别取0 和255。图2(a)为CCD 所拍摄的图像,经过滤波与灰度变换效果如图2(b)所示。
3 目标图像位置坐标提取
为了确定激光光点在高速运动时所经过的位置,依次读入各帧图像,根据激光光点图像和背景图像的灰度来确定激光光点图像各个像素的坐标,采用像素坐标平均法计算出激光光点的近似中心坐标,即求解像素体系质心的方法得中心坐标。经过多次实验测量,结果表明采用这种方法所得出的中心坐标与实际的中心坐标十分接近。
综上所述,像素坐标平均算法可以表示为:

其中,P(x,y)为激光光点位置的中心坐标;n 为灰度G(x,y)= M 的像素个数;Fn(x,y)为灰度G(x,y)= M 的第n 个像素的坐标,如图2(c)所示。
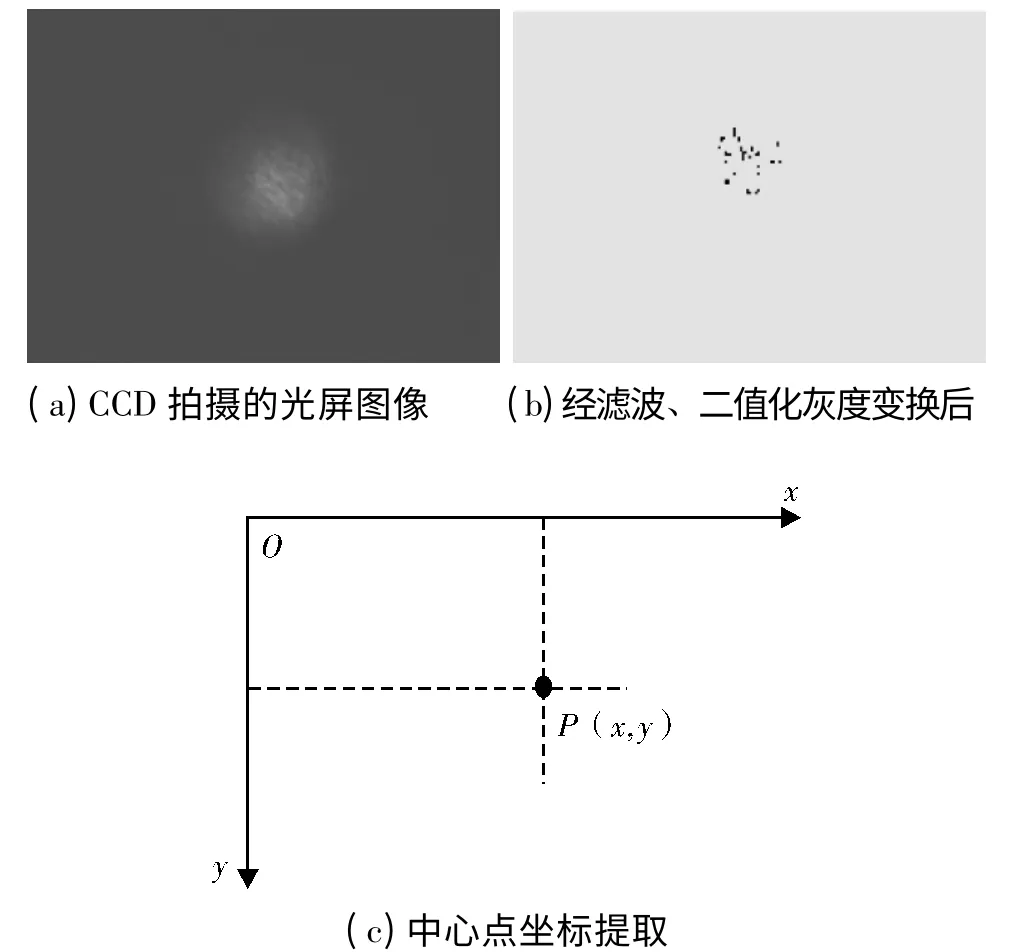
图2 光点图像处理过程
4 光迹轨迹拟合
前面已经将每一帧图像里激光光点图像位置的中心坐标提取出来了,在一张同等大小的空白图像中,将所有激光光点位置的中心坐标用点在相应的位置描绘出来,然后根据所采集的光点顺序依次把各点叠加显示,处理过程如图3 所示。根据振荡的周期,设置较佳的采集速度,由采集图像信息点的中心坐标最终形成连续、完整且近似于激光光点运动轨迹的曲线,通过程序处理给出信号的振幅、频率等信息。

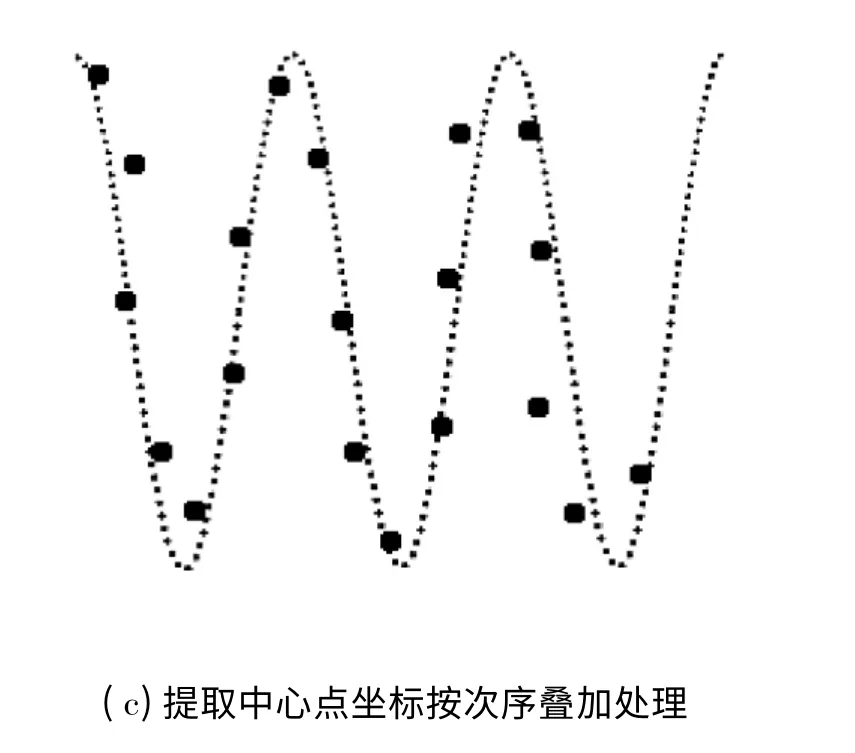
图3 图像集的光点提取处理及叠加
5 结束语
本文提出的采用高速工业CCD 光迹捕捉的方法,通过对所得图像集应用图像处理技术,实现光线示波器的计算机处理与显示。在实现手段上,首先通过像素灰度属性的分析提取图像的感兴趣部分,再使用中值滤波法对图像进行了去噪处理,然后利用激光光点图像与背景图像的灰度属性进行灰度变换,增强图像的对比度,方便了图像的叠加处理,最后经多项式插值拟合得到光滑曲线,实现了激光光点运动轨迹的重现以揭示电信号的波动性。
[1]王中平,张权,朱玲,等.CCD 成像辅助激光散斑实验[J]. 物理实验,2010,30(10):11-13.
[2]李睿,彭新德,闵军,等. 数字图像处理技术在大米外观品质分析中的应用[J]. 计算机系统应用,2011,20(4):194-198.
[3]李树涛,胡秋伟.OpenCV 在“数字图像处理”课程教学中的应用[J]. 电气电子教学学报,2010,32(6):26-28.
[4]景敏. 数字图像处理技术的应用[J]. 机械管理开发,2011(1):201-202.
[5]高守传,姚领田.Visual C+ +实践与提高——数字图像处理与工程应用篇[M]. 北京:中国铁道出版社,2006:52-69.
[6]左飞,万晋森,刘航.Visual C+ +数字图像处理开发入门与编程实践[M]. 北京:电子工业出版社,2008:436-439.
