一种基于灰关联和Sobel算子的完全非结构化道路边缘检测方法
2013-08-11胡晓辉孙苗强
兰 丽,胡晓辉,孙苗强
(兰州交通大学 电子与信息工程学院,兰州730070)
0 引 言
智能车辆自主驾驶系统的关键技术之一是基于视觉的道路检测.近年来,自主驾驶系统的研究,随着计算机和机器人技术不断发展,也得到了飞速的发展.其中,怎样在各种复杂自然环境下准确识别前方道路是自主驾驶系统的一个难题[1].
自主驾驶系统实际中的道路处于完全真实的室外环境,因此道路结构尤其复杂.除了高速道路、街道、乡村公路等有明显车道线和边界的结构化道路,还有山路、乡间小路、泥土路等无明显车道线和边界不清晰的非结构化道路.对于结构化程度较高的道路,可将道路检测的方法一般简化为车道线检测.而非结构化道路,因受自然环境中季节、天气或者光照等的影响,例如树荫遮蔽、雨雪积水等,都会造成道路表面特征的改变,给非结构化道路检测带来一定的挑战性.目前,已有一些研究针对像校园道路这样部分非结构化道路[2-4],而针对山地环境这样完全非结构道路研究较少,本文研究对象是完全非结构化道路.
如何从彩色图像中获得道路的信息是基于视觉的道路检测的关键.由于道路处于真实的自然环境中,摄像机获得的图像往往受各种环境因素的影响而退化.另外,由于完全非结构化道路图像的某些特征,例如边缘、轮廓等本来就不是很明显,这使图像处理后序过程的信息提取受到直接影响.
灰色系统理论是由华中科技大学的邓聚龙教授于20世纪80年代初在国际上首先提出的研究少数据、贫信息不确定性问题的新方法,是一种现已广泛应用于社会、经济、科技、农业、生态、生物等各个领域[5],这一日趋成熟的新理论已赢得了国际、国内学术界的肯定和关注[3].利用灰关联分析对图像进行处理是近年来灰度图像处理领域出现的一种新方法,在边缘检测方面已经取得较好的效果[6-8].从检测的角度来说,完全非结构化道路彩色图像边缘信息是无法预知的,可以将它看作一个灰色系统.
把灰色关联分析引入边缘检测的实质是依据比较序列和参考序列的关联度大小来判断是否为边缘点,因此边缘点判断的准确与否与参考序列有很大的关系.Sobel算子是常用的检测图像边缘的算子,用它计算图像一阶梯度,而以它作为模板对图像进行空间域滤波,其极值就是图像的边缘,所以它在一定程度上可以反映图像边缘像素的分布特性.本文将灰色关联度引入完全非结构化道路彩色图像边缘的检测中,将由彩色空间的三维分量信息生成的比较序列与由Sobel算子形成的参考序列计算其灰色关联度,生成色彩分量灰关联度图像,然后进行道路彩色图像边缘检测.实验表明,该算法充分利用了实时彩色道路图像,具有较高的精确性和实时性.
1 算法原理与步骤
(1)图像预处理
在本文的基于彩色视觉的道路检测系统中,由于获得的初始图像分辨率较高.为了满足系统的实时性要求,本文首先在2×2的窗口内求平均,再对得到的图像进行二次抽样.但是平均会模糊图像,通过实验,我们发现当求平均窗口小到和二次样本间的距离相当时,这种影响就会减少.
(2)确定参考序列和比较序列
邓氏关联度是用于定量表征灰色系统各因素间关联度的常用方法之一,由邓聚龙教授最早提出的.在邓氏关联度中对灰色关联系数的定义为[5]:
设参考序列x0={x0(k)|k=1,2,…,N},比较序列xi={xi(k)|k=1,2,…,N},其中 N 表示参考序列和待比较序列中分量的个数,则关联系数的计算公式:

其中ρ称为分辨系数,一般情况下常取0.1、0.5,ρ值可以提高关联系数间的差异,其值越小,关联度分辨效果越明显,本文通过实验取ρ=0.205.δi,0(k)表示在第k个时刻比较序列xi与x0之间的相对差值,将其定义为序列xi对x0在k时刻的关联系数,它反映了不同序列在同一点与参考序列的相似序列.
由于完全非结构化道路彩色图像边缘信息是无法预知的,可以将它看作一个灰色系统,来进行灰关联分析.Sobel算子反映图像的一阶梯度,而以它作为模板对图像进行计算,若边缘点处达到极值,就是图像的边缘,因此本文采用Sobel算子作为参考序列计算图像中各点的关联度.由图1可得由Sobel算子形成的两个参考序列为:


图1 Sobel检测算子
本文选取符合人体视觉的HSI空间模型,利用HSI空间的H(色度)、S(饱和度)和I(亮度)分量图像,形成比较序列.假设每个分量图像的大小为N×M,则对每一个分量图中某一个像素xi,j点,其邻域的空间位置分布如图2所示.

图2 xi,j及其八邻域的空间位置
根据图2,利用像素xi,j的八邻域分量值可形成像素xi,j比较序列为:

其中,i=1,2…N;j=1,2…M.为了描述方便,用xq表示第q个比较序列xi,j,其中q=1,2,…,N×M.
(3)生成彩色灰关联度图像及图像合并
按(2)所述方法,分别作用于HSV空间上的两个分量H、S上,得到两张边缘检测图像D1和D2,然后按或运算合并方式得到彩色道路图像边缘.
2 实验结果与分析
为了验证本文所提算法的有效性,本文在山地拍摄多副彩色道路图像,图像采集设备为CANON EOS 5DMark II数码像机,图像尺寸320×400.利用matlab7.0仿真本文提出的检测算法.图像经过2×2窗口内平均值及二次抽样,最终大小为80×100.
实验检测了四种自然情况下的实地山地图像,如图3所示,图3(a)为边界退化常规道路图像;图3(b)为存在大片水迹干扰的道路图像.
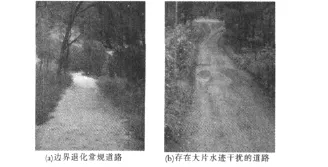
图3 实地采集部分山地图像
图4展示了对上述图像的检测效果,上排为直接利用Soble算子,下排为本文算法.

图4 道路边缘检测结果
从检测结果可以看出,直接利用Sobel算子进行边缘检测得到的图像边缘很模糊,对于边缘退化的道路有较大面积的间断区域,对于有水迹干扰的道路边缘有误判断.而利用本文算法对图像进行处理,得到的图像比直接利用Sobel算子对图像处理得到的结果好,图像的边缘轮廓比较清晰,且对于水迹干扰的道路边缘也能做出较好的检测.
3 结 论
目前针对完全非结构化道路边缘检测还没有成熟的检测方法,用传统的边缘检测算子进行检测适应性差.与之相比本文提出的基于灰关联和Sobel算子的完全非结构化道路边缘检测方法不依赖于道路形状和假设,算法实时性好,边缘检测结果清晰.实验结果证明了在非结构道路边缘检测中,灰关联分析是可行的,而且是高效的,为非结构化道路的检测提供了一种新思路,具有理论和技术参考价值.
[1] Miguel Angel Sotelo,Franeiseo Javier Rodriguez,Luis Magdalena,Luis Migue Bergasa,Lueiano Boquete.A color Vision-Based Lane Tracking System for Autonomous Driving on Unmarked Roads[J].Autonomous-Robots,2004,16:95-116.
[2] Jeong H,Oh Y,Park J H.Vision-based Adaptive and Recursive Tracking of Unpaved Roads.Pattern Recognition Letters[J].2002,23(13):73-82.
[3] 郝志帅.复杂环境道路检测技术研究[D].南京:南京理工大学硕士论文,2009.
[4] Li Dajie,Chai Yi,Yin Hong-peng,etal.Method of Road Recognition Based on Color Image Edge Detection[D].Computer Engineering and Applications,2008,44.
[5] 邓聚龙.灰理论基础[M].武昌:华中科技大学出版社,2002.
[6] 马 苗,樊养余,谢松云等.基于灰色系统理论的图像边缘检测新算法[J].中国图像图形学报,2003,8(10):1136-1139.
[7] 马 苗,郝重阳,韩培友,等.基于灰色关联分析的图像保真度准则[J].计算机辅助设计与图形学学报,2004,16(7):978-983.
[8] 钟都都.红外图像处理与仿真技术应用研究[D].西北工业大学硕士论文,2006.
[9] R.Bajcsy,SW.Lee,A.Leonardis.Dectection of Diffuse and Specular Interface Reflections by Color Image Segementation[J].Int.J.of Computer Vision 1996,17:241-272.
