小功率宽调速范围开关磁阻电机控制系统设计
2013-08-10付玉红韦忠朝
付玉红,韦忠朝
(华中科技大学电气与电子工程学院,湖北 武汉430074)
开关磁阻电机(SRM)结构简单,可靠性高,调速范围宽,调速性能优异,在整个调速范围内都具有较高的效率,使得其在家用电器、电动车驱动等领域得到广泛应用[1].笔者设计开发一套500W三相(6/4极)结构的开关磁阻电机.根据SRM的工作原理和电动机运行时能量传递分析,设计了合理的驱动控制系统.将这套开关磁阻电机控制系统装置应用在料理机中,经过实验研究,证明了该套开关磁阻电机在小功率,宽调速范围内的可行性和可靠性.
1 开关磁阻电机驱动系统介绍
开关磁阻电机驱动系统主要由开关磁阻电机、功率变换器、控制器和检测器组成(图1).

图1 开关磁阻电机驱动系统结构框图
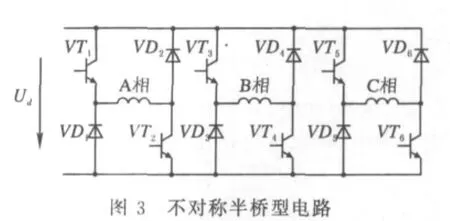
开关磁阻电机选用三相(6/4极)结构.它遵循磁通总是沿着磁导最大的路径闭合的“磁导最大原理”,产生磁拉力形成磁阻性质的转矩,使转子转动.它在结构上的构成原则是转子旋转时,磁路的磁导要有尽可能大的变化[2].因此,开关磁阻电动机一般采用凸极定子和凸极转子形式(图2).功率变换器是开关磁阻电机运行时所需能量的供给者,是连接电源和电动机绕组的开关部件.功率变换器主电路的结构型式与供电电压、电机相数及主开关器件的种类有关.图3所示为系统所采用的功率变换器主电路—不对称半桥型电路.

位置变换器采用的是光电式,用三个光电开关检测转子位置,并由此信号计算电机转速.控制芯片采用单片机C8051F360芯片[3].它综合位置传感器、电流传感器所提供的转子位置、速度和电流等反馈信号及外部输入的命令,然后通过分析处理,决定控制决策,向功率变换器发出驱动信号,控制开关管导通和电机运行[4].
2 开关磁阻电机的控制策略分析
2.1 开关磁阻电机运行机分析
假定电动机磁路不饱和,认为相绕组电感L(θ)的大小与绕组电流无关,据此建立电动机的线性化模型,然后分析开关磁阻电动机的基本电磁关系.
对某一相分析,在绕组通电期间,相应的电路方程为

定义绕组电感为L,即有
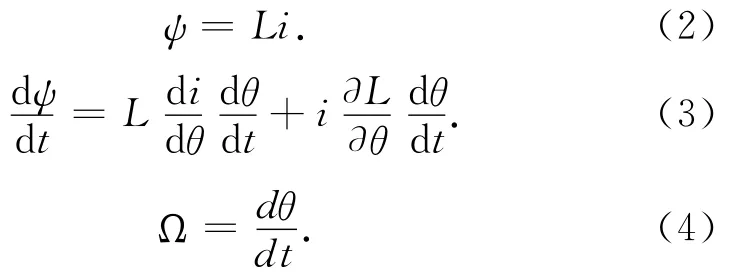
代入(1)可得

在忽略电阻损耗假设条件下,将上式两边乘以电流i并进行微分变换,得

由上式可以看出,当相绕组开关S导通时,单位时间内从电源输入的电能ui中,一部分用于增加磁场储能,一部分转换为机械能输出当绕组开关S在电感增加区域内关断时,有机械能输出,磁场储能只有一部分返回给电源,另一部分转换成机械能.若开关S在电感最大区关断,此时磁场储能全部返回电源,没有机械能输出,若S在电感下降去关断,有部分机械能转换为电能反馈回电源.
由以上分析可得:可以通过控制开关管的导通,仅在电感上升区给对应相绕组通电,使电机获得最大的机械能输出.结合三相绕组的电感变化曲线,再根据实际光电开关的安装位置,可以得到6个开关码所对应的绕组的导通情况,以此来控制各相绕组开关管的导通顺序.
2.2 系统具体软件控制算法分析
开关磁阻电机有4个可控参数:开通角θon、关断角θp、相电流幅值Imax和直流电源电压U.改变主开关器件的触发导通时间可以改变对电流大小和波形的控制,从而有效地调节电动机的转矩、转速和转向.光电开关的位置决定了主开关器件的触发导通时间,所以要合理安装光电开关的位置.系统选择光电开关H1位置为转子转到A相绕组下时H1刚好发生由高到低的跳变.三个光电开关分别相差15°,所以确定了H1的位置,另外两个光电开关位置也就固定了,结合三相绕组电感的变化曲线,6个开关码所对应绕组导通相也就确定了.依次对定子A→AB→B→BC→C→CA→A相绕组通电,电机逆时针方向运行,规定为正向运行.依次对定子C→BC→B→AB→A→CA→C绕组通电,电机顺时针方向运行,规定为反向运行[6].导通示意图由图4所示.

图4 各相绕组导通示意图
根据系统性能要求,开关磁阻电机转速控制分起动阶段、低速段、高速段三部分.具体各阶段下定转子导通方式和导通角调节流程如图5所示.

图5 定转子结构的导通方式与导通角调节的流程图
2.2.1 开关磁阻电机起动运行程序分析 为了保证开关磁阻电机的可靠运行,一般在低速(包括起动)时,采用电流斩波控制,确保磁链和电流不超过允许值.但在本系统中,实际测得电流为1A左右,而选用的开关管为16A,所以低速段不采用电流斩波控制,而采用步进程序控制,这样降低了程序的复杂性.位置信号用于电流的给定判断,同时用于负载的大小判断,而电流控制方式为标量方式,电流闭环为滞环控制.
根据光电开关反馈回来的转子位置,确定了起始导通相,然后进入步进程序,不再根据光电开关反馈信号改变导通相,而是每隔32ms换一次相,正向旋转式按照正向绕组通电顺序A→AB→B→BC→C→CA→A进行换相.反向式按照反向绕组通电顺序C→BC→B→AB→A→CA→C进行换相.在转速达到200r后结束步进程序,进入正常运行程序.
2.2.2 开关磁阻电机低速(200~2 600 r/min)运行程序分析 低速段和高速段均采用脉宽调制的斩波控制和闭环控制.通过对直流电源电压U 的调节,可以实现对开关磁阻电动机的转矩、转速进行调节.根据相邻两个光电开关反馈信号的间隔时间来求得电机实际转速,然后根据转速给定信号比较来确定实际输出PWM波占空比.系统闭环采用查表法,绕组为导通方式为单、双拍六拍导通方式.
2.2.3 开关磁阻电机高速(2 600 r/min以上)运行
实验测得在2 600r/min转速下时采用六拍导通可以获得良好的转速特性,在2 600r/min以上采用六拍导通控制,会出现负转矩.六拍导通情况下,每个导通周期中每相绕组导通45°的机械角度,在转速比较高之后,电流下降比较慢,导致在对应相电感已经处于下降区时该相仍有电流,此时会出现负转矩,影响高速性能.
根据图4所示绕组导通图,可看出每相绕组在每个导通周期中导通45°机械角度.为了避免高速时出现负转矩,可改变系统程序,使得开关管提前关断15°,如图4所示尾部的15°区间,这样每相绕组在每个导通周期中导通30°机械角度,绕组正向旋转时按A→B→C通电顺序给绕组通电,反向旋转时按C→B→A通电顺序给绕组通电.实验证明系统电机转速可达到11 000r/min.
2.2.4 开关磁阻电机制动运行 由开关磁阻电机运行机理分析可知,若每相绕组的电流主要在电感下降区存在,将产生负的磁阻转矩,即制动转矩.它与轴的负载转矩方向相反,可以达到限制或降速的目的.在电源供电时,则电源输入的电能和外界输入的机械能均转换成磁场储能;在续流时,则磁场储能转换为电能通过外接制动电阻消耗掉,电机运行在制动状态.
系统在有任何错误产生的时候都会产生制动信号,程序在检测到制动信号后启动制动程序,在电感下降区给对应相绕组通电,产生制动转矩,此时由于电源输入的电能和外界输入的机械能均转换成磁场储能,当电压升高,程序检测到母线电压升高30V后,接通制动电阻将磁场储能消耗掉,降低转速.实验证明,电机可以在2.5s内迅速停机,满足项目要求.
3 控制系统应用在料理机中进行实验研究的实验波形及分析
电机是料理机的心脏,因此,料理机对电机的要求很高,一般要求电机具有运行平稳、很宽的调速范围、操作简单、噪声低等特点.而开关磁阻电机的优点使得其在料理机中得到越来越多的应用.本文将控制系统应用于料理机中并进行了实验研究.
实验记录了步进状态、2 000r/min、5 000r/min、10 000r/min转速下电机U相的电压、电流波形(图6),其中红色线条代表相电压波形,绿色的为相电流波形.
1)起动阶段相电压、相电流波形.
从以上步进状态下相绕组的电压电流波形与高转速下的电压电流波形对比可知:电机起动过程中电流上升很快,容易过流对电机造成冲击,而高速段经过PWM斩波后电机电流波形上升变缓,对电机冲击小.实验过程中,电机正常运转后,电机运行平稳,噪声较小.
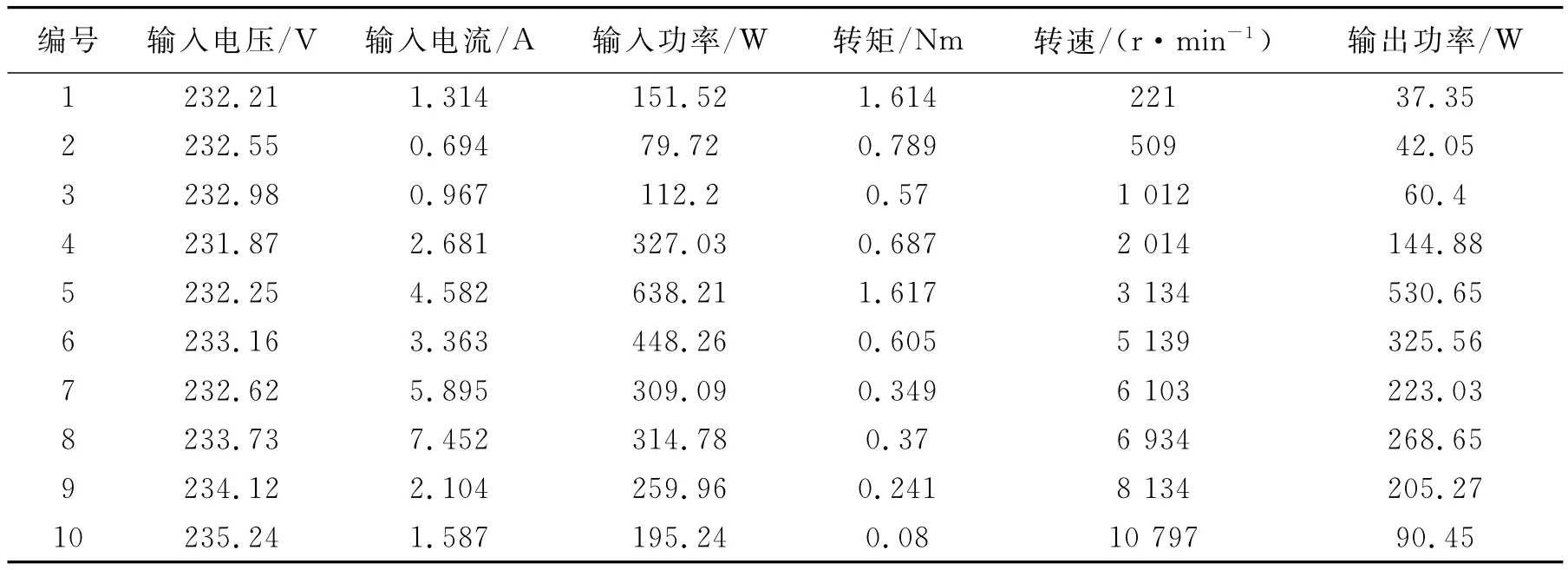
表1 实验数据记录
从表1数据可知,电机可以实现200~11 000 r/min的平稳运行,可以承载500W以下的负荷,实现了预期的目标.
4 结论
如何在给定的运行条件及功率等级下,通过优化设计和优化控制来提高电机的有效输出功率和效率一直是开关磁阻电机研究的重点.本文通过开关磁阻电机转速分段闭环控制和改变导通角度控制,实现了开关磁阻电机的宽范围调速.通过实验,这套控制系统装置较好地应用在料理机上,从而验证了开关磁阻电机控制简单、效率高、调速性能良好等特点,也证明了该宽调速范围控制系统设计合理性,以及在小功率、宽调速条件下的适用性.
[1]唐任远.特种电机原理及应用[M].北京:机械工业出版社,2010.
[2]吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
[3]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2007.
[4]张 强,吴红星,谢宗武.基于单片机的电动机控制技术[M].北京:中国电力出版社,2008.
[5]纪良文.开关磁阻电机调速系统及其新型控制策略研究[D].浙江:浙江大学图书馆,2002.
[6]Michael.Switched reluctance motor control-basic operation and example using the TMS320F240[R].American:Texas Instruments Application Report,2000.