电力推进船舶功率管理系统设计和研究
2013-08-10柯常国王劲杨俊飞
柯常国, 王劲, 杨俊飞
(武汉船用电力推进装置研究所, 武汉 430064)
0 引言
电力推进技术的快速发展为船舶发展带来了革命性的变化,采用电力推进技术在机动性、可靠性、运行效率、布置灵活性、经济性、易于使用维护等方面的巨大优势,使得电力推进技术广泛应用于工程船、豪华游船、油轮等。电力推进装置作为船舶电力系统的最重要、最大的负荷,电力推进负荷与其他日用负荷共用同一电力系统,原动机就可以根据运行工况灵活配置,同样情况下可采用较少原动机运行于高效负荷段,可大大节省燃料和运营成本。
电力推进船舶主要用电设备包括:电力推进装置、侧推装置、日用变压器(日用负荷)、绞车、特种起吊设备、其它重载设备。相对于电力推进负荷,船舶电网的容量显得非常有限,电力推进负载稳定运行事关电力系统的安全,另一方面,电力系统的供电连续性直接关系到动力安全和船舶安全。因此,对船舶负载和能量的管理、系统组成、配置、以及运行控制和调度都提出了更高的要求,具船舶功率管理系统(PMS,Power Management System)应运而生。特别是装备有动力定位系统的船舶,为了确保各种环境下的定位能力和机动性,船规要求,DP-2或DP-3系统必须配置功率管理系统。
功率管理系统可对船舶电能进行集中统一调度、管理、控制,是综合电力系统船舶的核心控制部分之一。尤其随着现代船舶的发展,电力系统的稳定性和故障后处理方法也更趋向复杂,对全船电能进行集中管理的要求更高,功率管理系统需要完成的功能也更趋复杂。
1 国内外现状及船规要求
1.1 应用现状
目前,各大电力推进系统集成商都具有各种成熟、可定制的功率管理系统。如西门子的PMA300,西门子功率管理系统 PMA300系统适用于具有 3~8台发电机的常规船舶和柴油电力推进的船舶,由西门子公司的标准化硬件设备所组成。每台发电机都设有一套独立的发电机保护和同步装置,通过PROFIBUS-DP连接,并设有操作面板用来设置修改参数、监视运行状态等。CONVERTEAM(原 ALSTOM)的功率管理系统主要有功率管理工作站(IPC)、功率管理系统控制箱、网络开关盒、配电板现场工作站等组成,通过双以太网网冗余连接。KONGSBERG公司PMS产品主要包括断路器控制器、柴油机安全停车保护单元、变压器控制器、柴油发电机控制器,通过双CAN总线进行连接。
1.2 船规要求
钢制海船入级建造规范 2009版明确指出,DP-2的船舶,在出现单个故障(不包括一个舱室或几个舱室的损失)后,可在规定的环境条件下,在规定的作业范围内自动保持船舶的位置和首向。对于PMS来讲,应对分断的母线分别设置独立的PMS系统,或者采用冗余的控制器,单个的PMS控制器故障不至于影响其他PMS控制器。船规要求,在无人值班周期内,自动化系统应能保证电站及其他机电设备,如空气压缩机、舱底水系统(包括油水分离器)、与遥控有关的阀、燃油系统以及 CCS 认为有必要进行自动化监控的其他机电设备。对于PMS来讲,机组备车置于遥控位,各空压机、分油机、燃油泵等设备处于遥控状态,PMS可自动协调这些辅助设备和机组启停、运行,无需人工介入,并可将控制通过网络延伸到机舱集控室控制站或驾驶室控制站。
对于供电连续性,单机供电时,采取分级卸载、自动启动备用机组、推进功率限制等措施来确保。多机并联工作,采用分级卸载、自动启动备用机组、推进功率限制、汇流排分段工作等措施来确保。失电时,备用机组自动启动自动合闸连接到汇流排。失电恢复后,重要负载(推进辅机、舵等)顺序合闸。
2 功率管理系统功能设计
2.1 主要功能设计
2.1.1 功率管理模式
PMS实现半自动、自动、越控三种控制方式。在半自动模式下,机组起停控制依据人工操作指令进行,自动进行负载分配,自动完成机组主开关的合闸、分闸控制。自动模式下,根据实际负荷情况自动完成机组增减机起停控制,自动进行负载分配,自动完成机组主开关的合闸、分闸控制。越控模式适用于负荷变化较快的运行工况,根据实际负荷情况自动完成机组增机启动控制,自动进行负载分配,自动完成机组主开关的合闸控制。越控模式能切除自动减机程序,使发电机组全部或按要求台数投网运行。
2.1.2 根据负载自动增机/减机
根据负载情况自动增机/减机机组有三种模式。
1)固定负荷率增机减机管理模式:该原则是指设定增加和减少运行机组的负荷率值。一般运行机组的总负荷率大于75~95%额定值时,增加机组;运行机组的总负荷率小于30~40%时,减少机组。
2)优化的固定负荷率增机减机管理模式:该原则是指设定增加和减少运行机组的负荷率值。一般运行机组的总负荷率大于 75~95%额定值时,增加机组;预先估算待解列机组解列后的总负荷率小于45~65%时,减少机组。这种方法适用于机组容量相同或不同容量机组的电力系统,不会出现多台机组低负荷并联运行工况,经济性较好。
3)固定储备功率增机管理模式:该原则是指设定储备功率为恒值,一般为单机组额定功率的1/3,根据并联机组数不同,计算出增机平均功率值。该模式确保系统时刻保持一定比例的储备功率,适用于机组容量相同的电力系统,且负荷越高越经济。
这三种模式都按事先设定的优先顺序来起动和停止发电机组。目标是通过配置适当的发电机组数实现能量效率最佳,并确保负载用电需求。考虑柴油机燃油的消耗、磨损、维修,柴油机最佳的运行条件为其最大连续输出的 85%,PMS应使柴油机在较大负载运行,并通过控制投入电网的柴油发电机组的台数,满足负载的功率需求,从而使柴油发电机组有较好的运行性能和好的经济性。显然,根据本系统的多种机组容量,该选用优化的固定负荷率增机减机管理原则。
2.1.3 机组投入和并联运行
母线无电时,待用机组在达到一定电压和频率后立即投入。母线有电时,待并机组可自动同步,自动合闸。有预防措施,以避免两个或两个以上发电机组开关同时合闸。机组投入运行后,频率调节精度为50±0.5 Hz。当电网出现短路故障而造成在网发电机主开关脱扣时,在人工应答复位前防止各发电机组开关重新合闸。
自动并车主要技术指标:合闸频差可调范围为: ±0.1~0.5 Hz;合闸电压差: ≤ 5% UN;允许合闸相角差: 0°~10°。
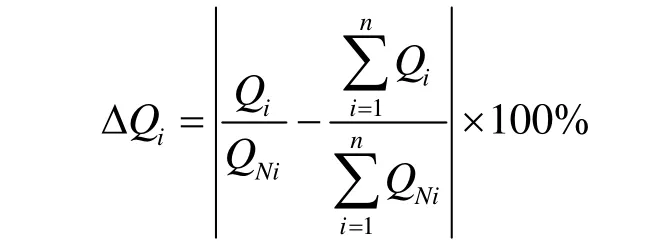
自动并联后,具有有功功率自动分配功能。在机组正常工作时,保证任意发电机组长期并联运行,当总负荷率在 20%~100%和功率因数在0.6~0.9(滞后)范围变化时,保证有功功率分配差度不大于5%(相同功率机组)或10%(不同功率机组的小机组),无功功率分配差度不大于10%。分配差度计算公式如下式,其中:
Pi—— 参加并联运行的第i台发电机组实际承担的有功功率,kW;
PNi—— 参加并联运行的第 i台发电机组的额定有功功率,kW;
△Qi—— 参加并联运行的第i台发电机组的无功功率分配差度;
Qi—— 参加并联运行的第 i台发电机组实际承担的无功功率,kVar;
QNi—— 参加并联运行的第 i台发电机组的额定无功功率,kVar 。

2.1.4 电力推进装置功率限制
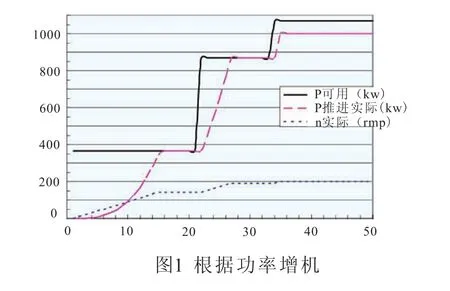
保证供电连续性及预防全船失电(Blackout)是PMS最重要的功能之一。全船失电是指船舶电力完全丧失,是电力推进船舶最严重的故障。发电机过载是导致全船失电的主要原因之一。多台发电机组并联供电的情况下,其中一台发电机组因为原动机严重故障跳闸,在网的其他发电机组势必过载运行,过载的发电机转速快速跌落,从而导致频率跌落,容易引起过载跳闸、欠频跳闸或逆功跳闸。因此发电机过载时,必须对电力推进装置功率进行限制,快速下降,确保发电机组过载时间较短不至于保护跳闸。因为在过载情况下,发电机组易于发生滑油低油压及高油温、冷却水高温、频率低等严重故障而跳闸,因此,要尽量缩短发电机组过载的时间。本系统通过基于可用功率的推进系统功率限制技术,配合电站异常跳闸等异常事件监测的快速降负荷设计,确保供电连续性,如图2。

如图3,当两台发电机组G2、G3并联供电,t=0.8 s时,G2因为故障保护跳闸,G1负荷率突加超过 150%,通过计算可用功率并对推进功率进行限制,可快速降低电力推进装置的电功率,使在网机组的负荷率恢复到额定功率以下。通过实际试验验证,机组过载时间控制在1 s以内,推进功率快速下降时间控制在150~200 ms内。
2.1.5 全船失电恢复
全船失电恢复即是,一旦全船失电,PMS将在较短时间内自动恢复正常的电力系统功能。万一发生全船失电,PMS将在同一时间起动所有可用的发电机组,率先启动成功的发电机组投入运行。所有变压器、配电断路器和母联开关将根据当前的运行模式按照设定好的次序依次闭合,实现船舶电力系统的重新配置。
2.1.6 重载询问
在启动大容量的用电设备之前,用电设备应先向 PMS发出启动请求,PMS根据机组在网情况,判断是否能满足它们的用电和起动要求,若能够满足时,则发出启动允许信号,允许启动;若不能满足时,则应在一台备用发电机组启动、并网且在网机组功率贮备足够时,才发出启动允许,允许它们投入电网用电。
一般应将额定功率大于等于主发电机单机额定功率15%~20%的负载视为大容量用电负载。重载设备的启动情况,应系统设计中予以充分考虑。
若功率管理系统处于具有自动增机功能的模式时,则在进行重载询问判断电站现时供电发电机的功率贮备是否能满足大容量用电设备的用电要求时,应使大容量用电设备起用后的电站总负载量不超过重载判断条件中的临界值。在无备用发电机组可用的情况下,不得发出启动允许。
若需要进行重载询问的大容量用电设备不止一个,则在某一大容量用电设备正在进行重载询问时,应对其他大容量用电设备的重载询问通道实施闭锁(或记忆性闭锁),并直到先行询问的大容量用电设备接入电网稳定运行后才能解除这种闭锁,以避免两个或两个以上大容量用电设备的同时起用。
若某一大容量用电设备属于重要设备,则在紧急情况下应能实现对其重载询问功能的越控。
2.1.7 自动分级卸载及分级启动
当电网在线负载的总用电量超过供电发电机的额定输出能力,并持续一定的时间之后,应能自动将在线负载中的次要负载以一级或分作几级的方式从电网分断,以确保对重要负载的连续供电。分级卸载应根据被卸负载的相对重要性,确定分断的先后顺序。当发电机发生单相或两相持续过载时,自动分级卸载装置也应能发出卸除次要负载的指令。断电电网自动恢复供电之后,应实施负载的自动分级起动,以限制起动冲击电流,防止出现电网电压跌落过大或恢复时间过长。实施负载的自动分级起动,应根据紧急情况下各用电负载的重要性以及它们起动电流的大小进行排序和分级,并应按重要负载先行起动和每级起动电流尽可能均等并接近允许限值的原则安排合理的起动程序。各用电设备的重要性排序应与考虑由应急发电机供电的负载优先顺序相同。应根据供电发电机的性能及负载的分组情况合理地确定各级负载间的起动时间间隔,一般相邻两级负载的起动时间间隔可取3~5 s。实施负载分级起动时,应注意对投入负载总容量的限制,以防供电发电机组过载。实施分级卸载后的电网,在备用发电机组自动起动、并网成功后,应对先前卸除的次要负载实施自动分级投入电网。被卸负载投入电网的顺序应同卸载时的顺序相反。级数的确定和过程的控制还应注意防止电网较大浪涌电流的出现。
2.1.8 不断电船电/岸电转换
当进行岸电转船电时,根据所选的左舷变压器和右舷变压器,最后合闸的开关将是LCB1或LCB2,当进行船电转岸电时,最后合闸的开关将是11CB12,如图3。最后合闸的开关的合闸都是需要进行同步检测的并车过程,因此,390 V母线需要设置三个同步点,需要为这三台开关配置了相应的同步监测并车模块,而且为了确保发电机组与岸电并联运行时不逆功不过载,我们增加了3个PPU,并设计了以下的工作流程。
船电转岸电流程:
1) 接收到转换指令,在线发电机组工作于定频模式;2) 比较机组频率、岸电频率,若机组频率小于岸电频率,则增加机组频率给定,直至机组频率大于岸电频率,向岸电 PPU发出同步指令;3) PU检测同步,控制岸电开关11CB12合闸;4) CB12合闸后,在线机组PP转换为定功模式;5) 机组 PPU功率设定斜坡下降,逐步降低机组的负载,待机组有功降到额定值的 5%以内,发出机组开关分闸指令;6) 主开关分闸后,发出机组停机指令;7) 机组停机,转换完成。

岸电转船电流程:1) 接收到转换指令,根据机组优先顺序选择一台启动;2) 机组启动成功主开关合闸后,机组工作于定频模式; 3) 根据左右舷使用情况,自动选择左舷(或右舷)变压器供电开关 ACB7(或 ACB8)合闸;4)比较机组频率、岸电频率,若机组频率小于岸电频率,则增加机组频率给定,直至机组频率大于岸电频率,向左舷(或右舷)PPU发出同步指令;5)左舷(或右舷)变压器出线开关LCB1(或LCB2)合闸后,机组PPU工作于定功模式,功率给定斜坡上升,直至岸电负荷降到 5%机组额定负荷,发出岸电开关11CB12分闸指令;6)岸电开关11CB12分闸后,在线发电机组工作于定频模式。

2.1.9 人机界面监测功能
对电力系统重要参数的实时监控是实现PMS功能的前提保障。PMS可以根据电网的运行状况、每套发电机组的运行情况,动态调整对机组的控制指令。
2.2 硬件设计和试验验证
我们采用西门子的S7-300作为控制主站,通过PROFIBUS-DP,下面挂接ET200M和PPU的方式,来设计本船的功率管理系统。其中S7-300可编程控制器作为主控制器,通过PROFIBUS-DP收集下层控制设备的信息,经过功率管理策略分析处理,将指令传送到下层控制器。S7-300置于并车屏内。每个发电机屏设有ET200M分布式I/O一台,ET 200M模块化I/O站,它可以用S7-300可编程控制器的信号、功能和通信模块进行扩展。主要是收集发电机组的现场状态信息,并执行来自S7-300的控制指令。另外3个PPU安装390V配电板内,用于实现岸电船电的不停电转换的信号检测和控制。在实船试验中,对上述功能进行了试验验证,表1为四台机组并联运行的试验原始数据和计算得出的分配差度。
3 结束语
功率管理系统为电力推进船舶提供了可靠智能化的电源系统,同时为操作人员提供了详尽的数据监控,有利于操作人员对功率管理系统作出正确的分析和决策,确保本船供电连续性,有利于本船的经济、稳定、安全运行。
:
[1]袁任光编著. 可编程序控制器选用手册, 机械工业出版社, 2002.
[2]Designer’s Reference Handbook. DIEF, Denmark,2009.
[3]Damir Radan. Energy management of marine electrical power systems-control of integrated autonomous power systems. NUTU, Norway, 2008.
[4]John J. May. Improving engine utilization on DP drilling vessels. Dynamic Positioning conference,2003.
[5]中国船级社. 钢制海船入级建造规范. 中国交通出版社,2009.
