烘干炉温度控制的研究与分析
2013-08-09李国林
李国林,杨 志
(中国电子科技集团公司第四十五研究所,北京 100176)
PID控制器及其改进控制器是工业过程控制中最常见的一种控制调节器[1]。PID参数的整定一般需要经验丰富的工程技术人员来完成,既耗时又耗力,加之实际系统千差万别,又有滞后、非线性等因素,使PID参数的整定有一定的难度。因此,研究PID参数整定技术就具有了十分重大的工程实践意义[2]。
本文首先阐述了PID控制器的理论基础,重点介绍了继电反馈的参数自整定算法的基本原理,并以PLC温度控制器为平台,利用温度传感器采集温度,通过设定温度值与采集温度值的大小比较来控制固态继电器的通断,实现对被控对象的控温。很容易在工业控制系统中实现,控制效果较好。
1 PID控制器基本原理
常规的PID控制系统的框图如图1所示,该系统主要由PID控制器和被控对象组成。作为一种线性控制器,它根据设定值r(t)和实际输出值y(t)之间形成控制偏差e(t),并将偏差按比例、积分和微分作用通过线性组合求出控制量u(t),从而实现对被控对象的控制。
PID控制器根据给定值和实际输出值构成控制偏差,即:偏差e(t)=r(t)-y(t),则PID控制器的时域微分方程为:

或者写成传递函数(频域)的形式:

式中:Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,U(s)为控制量,E(s)为偏差值。

图1 PID控制系统原理框图
PID控制器各个参数对控制性能的影响:
(1)比例作用对控制性能的影响。比例增益Kp的引入是为了及时地反映控制系统的偏差信号,一旦系统出现了偏差,比例环节立即产生调节作用,使系统偏差快速向减小的趋势变化。偏差越大,则纠正偏差的比例作用就越强。比例控制是最基本的控制,如果它过小,则基本控制作用就过小。当比例增益Kp大的时候,PID控制器可以加快调节,但是过大的比例增益会使调节过程出现较大的超调量,从而降低系统的稳定性,在某些严重的情况下,甚至可能造成系统不稳定。
(2)积分作用对控制性能的影响。积分作用的引入是为了消除系统的稳态误差,提高系统的无差度,以保证实现对设定值的无静差跟踪。积分项反映了对偏差历史值的积分,只要偏差不为零,积分项就持续变化,从而产生减小偏差的控制作用。从原理上看,只要控制系统存在动态误差,积分调节就产生作用,直至无差,积分作用就停止,此时积分调节输出为一常值。在一定范围内,积分作用的强弱取决于积分时间常数Ti的大小,Ti越小,积分作用越强,反之就越弱。然而,积分项对系统的控制作用也有一些不良影响,比如积分作用的引入会使系统稳定性下降,动态响应变慢。
(3)微分作用对控制性能的影响。微分作用的引入,主要是为了改善控制系统的响应速度和稳定性。微分作用能反映系统偏差的变化律,预见偏差变化的趋势,因此能产生超前的控制作用。微分作用能在偏差还没有形成之前,就己经消除偏差,因此,微分作用可以改善系统的动态性能。在一定范围内,微分作用的强弱取决于微分时间Td的大小,Td越大,微分作用越强,反之则越弱。通过图2,我们可以直观地了解微分环节和积分环节是怎样起作用的。
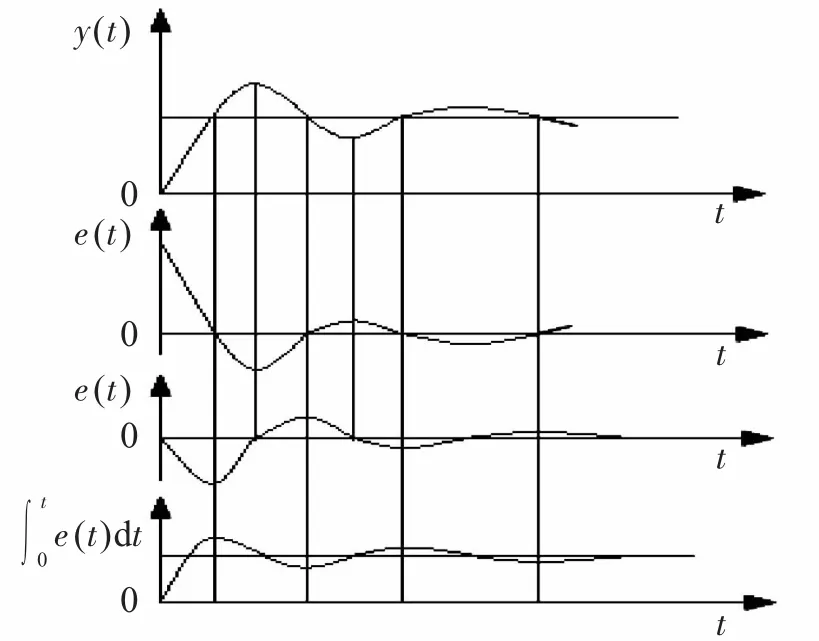
图2 微分调节作用和积分调节作用
2 继电反馈的PID参数自整定原理
1984年,Astrom和Hagglund提出了基于继电反馈控制的PID参数整定方法。继电反馈方法是在闭环控制回路中加入继电控制,利用继电控制的非线性特性使被控过程出现极限环振荡,从而获得过程的临界动态特性参数,再利用Z-N临界比例度法整定公式获得PID控制器的参数。该方法简单,可靠,易于使用,相比之前出现的多种PID参数自整定技术,继电反馈整定技术有许多优点。
继电整定法的基本思想是:在控制系统中设置两种模式,测试模式和调节模式,在测试模式下由一个继电非线性环节来测试系统的振荡频率和振荡幅值,而在调节模式下由系统的特征参数首先得出PID控制器参数,然后由控制器对系统的动态性能进行调节。如果系统的参数发生变化,则需要重新进入测试模式进行测试,测试完毕后再回到调节模式进行控制。继电反馈PID自整定的控制结构如图3所示。

图3 继电反馈PID自整定控制结构图
在测试模式下,也就是将图3开关Kab放在b处,而系统的继电特性环节如图4所示。

图4 继电环节特性
确定系统的振荡角频率及临界增益有多种方法,比较常用的是描述函数方法。通过在闭环系统中接入继电非线性环节,从而使系统产生极限环周期振荡,来测取振荡周期和幅值,即可求出临界周期和临界增益。
由描述函数理论可知,图4(a)中给出的带有回环的继电非线性环节特性的描述函数可以表示为:

式中:A——正弦波幅值;
d——回环幅值;
ε——回环宽度的一半。
这时系统的闭环特征方程发生振荡的条件可以写成,即:

设该等式的实部和虚部均等于零,则可以得出振荡频率和增益。这里只考虑一种简单的情况,假设继电非线性环节不带有回环,即若设ε=0,则描述函数可以简化为:

这里假定继电环节是如图4(b)所示的理想继电特性下,当输出滞后输入—π弧度时,闭环系统将以Tu周期振荡。图5显示了继电反馈系统是如何工作。开始输入u(t)为d,当输出开始增加,继电输出切换到相反的方向,u=-d。因为相位延时是—π,所以产生了一个周期是Tu的极限振荡,Astrom的继电反馈试验就是基于这样的思想。因此,从继电反馈试验测得的系统的振荡频率ωu为:

从傅立叶级数展开的观点来看,可以认为幅值A是继电输出的主谐波。因此,极限增益可以近似地认为是:

其中d是继电的高度,而A是振荡的幅值。这两个值可以直接用来求出控制器的参数。注意到这两个方程给出的是ωu和Ku的近似值。P、PI和PID控制器Z-N参数的设定如表1所示。
3 温度控制系统的设计与实验

图5 继电反馈系统的输入和输出

表1 原始Z-N参数整定表
本文所设计的控制系统主要由计算机、PLC模块和被控对象以及固态继电器、温度传感器等组成,主要包括参数自整定程序和PID控制程序两大部分,其中自整定程序是在系统加热过程中求出相应的控制参数,而当求出控制器的参数后系统自动转为PID控制过程。上位机通过串口与PLC模块通讯,来实现实时温度采集与控制输出量的大小,温度采集是通过温度传感器来实现。系统采用固态继电器作为输出控制模块,通过控制继电器的通断来控制输出量的大小,从而实现对被控对象的温度控制。控制系统框图如图6所示。

图6 控制系统框图
系统的下位机主要由热电阻、PLC模块和固态继电器以及被控对象组成,PLC模块主要负责信号的采集、转换、传输和输出控制。上位机可以通过VB或者组态软件来开发设计出一个温度监控系统,主要用来接收反馈信息,处理数据并通过相应的算法来得到控制信号,再将控制信号传输给PLC,并实现数据的实时显示,同时通过Excel表将数据导出,便于实验结果分析(见图7)。
系统的工作原理为:控制系统通过热电阻采集被控对象的温度并实时的传给PLC模块,PLC模块将采集的温度信号经过滤波处理及A/D转换成有效的温度值,再传给计算机。上位机的监控系统接收到此信号后,根据接收的温度值与设定温度值的比较来进行自整定运算或者PID运算,并计算输出控制信号。此控制信号经PLC模块转换成电流信号或电压信号,来控制固态继电器的通断,从而达到控制被控对象温度的目的。
再根据Z-N整定公式求出相应的参数值。其自整定输入输出控制实验如图7所示。

图7 继电反馈自整定实验的输入和输出
自整定程序的流程图如图8所示。运行原理:根据测量温度值PV与设定温度值SP的关系进行继电控制,同时,为了防止干扰,采用平均值法对测量值进行滤波,这由PLC中的滤波功能块完成。首先读PV和SP,然后加以比较。如果PV不超过SP,加热电阻炉。如果正在加热,然后判断温度是否高于SP。字母C记录温度高于或低于SP的次数。在温度上升过程中,通过比较找到最高温度y1并且记录其时间t1。在温度下降过程中找到最低温度y2并记录其时间t2。为了获得更好的调节参数,最大值和最小值取第二个周期中的波形。当C等于6,即已经找到y1和y2,然后计算出振幅A和周期Tu,如式8所示。
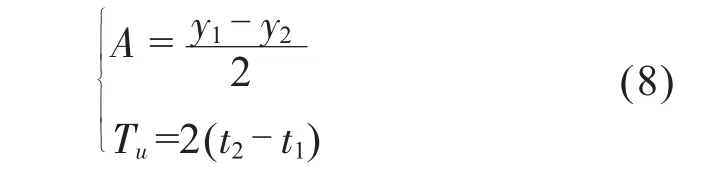

图8 自整定子程序流程图

控制过程采用不完全微分和变速积分相结合的PID控制算法,实验结果如图9所示,可以看出控制效果较好。

图9 烘干炉200℃时的控制曲线
4 结 论
本文主要介绍了继电反馈的理论基础以及参数自整定算法并给出了相应的实验,可以看出,继电整定算法不需要较多有关被控对象的先验知识,就可以整定出控制器参数,解决了传统控制中PID参数不易整定的缺点,有效地减小了被控对象的超调量,提高了控制系统的控制精度。通过大量的实验验证了此PID控制系统的可行性,此方法应具有很强的工业实际应用价值。
[1] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[2] 刘金琨.先进PID控制MATLAB仿真(第三版)[M].北京:电子工业出版社,2011.
[3] 胡寿松.自动控制原理[M].北京:科学出版社,2001.
[4] 张卫东.PID控制器自整定技术的发展[R].2002年世界控制大会总结报告.2002.
[5] Astrom,K.J.and Hagglund,T.PID Controllers:Theory,Design,and Tuning[C].Instrument Society of America,1995.
[6] Astrom,K.J.and Hagglund,T.The future of PID control[J].Control Engineering Practice,2001,9(11):1163-1175.
[7] 王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报.2000(3):347-355
[8] 王伟,张晶涛,潘学军.基于偏置继电反馈辨识的改进自整定PID控制器[A].中国控制会议论文集[C].大连:2001.
[9] 李国林.PID控制器参数整定技术研究与优化设计[D].大连:大连理工大学硕士学位论文,2010.
[10]胡晚霞,余玲玲等.PID控制器参数快速整定的新方法[J].工业仪表与自动化装置,1996,(5):11-16.
[11]谢元旦,夏淑艳.PID调节器的继电自整定方法[J].控制与决策,1993,8(1):77-80.