上海交通大学机器人焊接智能化技术实验室
2013-08-06
一、科研简介
上海交通大学机器人焊接智能化技术实验室成立于2000年3月,由教育部长江学者奖励计划特聘教授陈善本博士领衔,多年来一直致力于智能化焊接机器人技术和焊接动态过程信息获取与智能控制研究工作:运用人工智能技术模拟实现焊工观察、判断与操作行为,研究在局部环境基于视觉信息对焊接环境自动识别、导引跟踪焊缝、焊接熔池动态特征智能控制等关键技术,将计算机视觉、声音、电弧及其光谱等多信息传感与融合处理、知识建模、模糊神经网络、智能控制等智能化技术成功地用于解决各种典型工艺条件下脉冲TIG焊接动态过程控制这一焊接界的难题,形成了系列性的研究成果。研究了基于单目图像视觉信息的焊接环境识别、熔池动态形状与二维、三维特征的视觉计算、焊接过程声音与电弧特征提取与处理、运用模糊辨识与粗糙集理论对焊接过程的知识建模、焊接动态过程模糊神经网络控制器设计、对具有时滞的不确定对象的神经网络补偿与自学习控制;研究了局部自主智能焊接机器人系统的关键技术并集成研制了具有对焊接环境感知的初始焊为位自主识别与导引、焊缝识别与自主规划、轨迹修正和跟踪、焊接熔池视觉传感与特征提取、工艺专家系统指导、熔透与焊缝成形智能控制功能的局部自主智能化焊接机器人(LAIWR)系统,并在局部作业空间模拟焊工基本智能行为的自主焊接机器人单元,以及研制了基于视觉和电弧传感的轮足组合越障全位置移动焊接机器人系统。在基于视觉信息的焊接机器人自主与智能化关键技术及其系统实现等方向的研究中取得多项创新性结果。本实验室在相应机器人焊接智能化技术研究成果在海洋工程、航空航天、造船、汽车、家电等行业拥有多项成功的应用。
上海交通大学机器人焊接智能化技术实验室研究团队在上述领域研究曾获国家自然科学基金重点项目、面上项目、国际合作交流项目,863计划以及国防预研、国防基金、教育部和上海市重点项目等30余项资助。所研究的“局部环境自主智能焊接机器人关键技术”曾在航天飞行器、船舶与汽车焊接制造中获得了有效的应用,推动了我国航天、船舶重工等焊接制造自动化技术的进步。主要成员曾获国家科学技术进步奖二等奖2项、国防科学技术奖一、二等奖、中国机械工业科学技术一等奖、中国高校科学技术一等奖、教育部科技进步奖二等奖以及上海市科技进步奖、专利发明奖等多项;申请/授权国家发明专利30余项和软件著作10余项;出版中英文著作8部;在国内外学术刊物发表学术论文300余篇。
◆焊接智能化关键技术基础研究
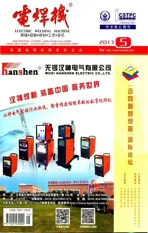
针对GTAW开展了基于电弧光谱、声音、电弧电压和熔池视觉等多元特征信息融合的焊缝成形及质量控制策略研究,见图1。
针对示教再现型焊接机器人不具备对于焊接环境识别、焊接动态过程信息获取、反馈以及实时闭环控制功能,难以满足高新技术装备对焊接制造高质量、高效率的要求,研制了局部自主智能化焊接机器人系统,见图2。
◆研制轮足组合越障全位置自主焊接机器人系统
在国家863计划支持下,自主研制了“越障全位置自主焊接机器人系统”,涉及了主要关键技术包括:非接触永磁吸附装置研究及优化、越障机构设计与控制、机器人焊接过程中平稳运动协调控制以及基于视觉传感的智能化焊接技术等,见图3。
◆机器人焊接系统工程应用
实验室联合上海船舶工艺研究所共同开发了船舶管系(中径管)管子-法兰自动焊接系统,解决了大中型船厂管径(Ф:114~273 mm)范围内管—法兰机器人自动焊。目前已在新时代造船、江南管业和广州文冲船厂推广应用,见图4。
针对船体分段“#字”形结构、曲面艕板机器人自动焊,联合上海船舶工艺研究所、江南造船厂开发了一套基于离线编程技术的机器人焊接系统,见图5。
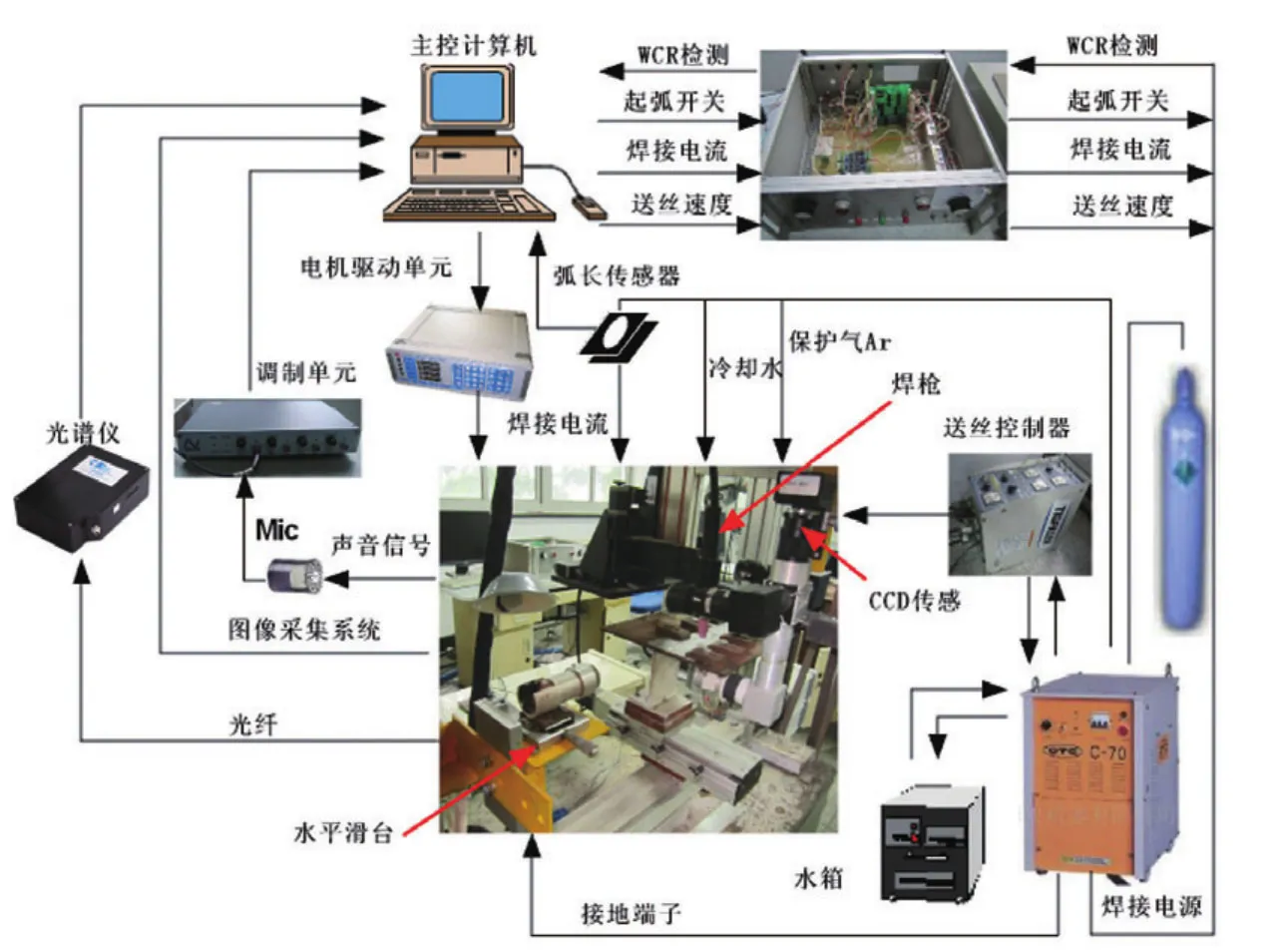
图1
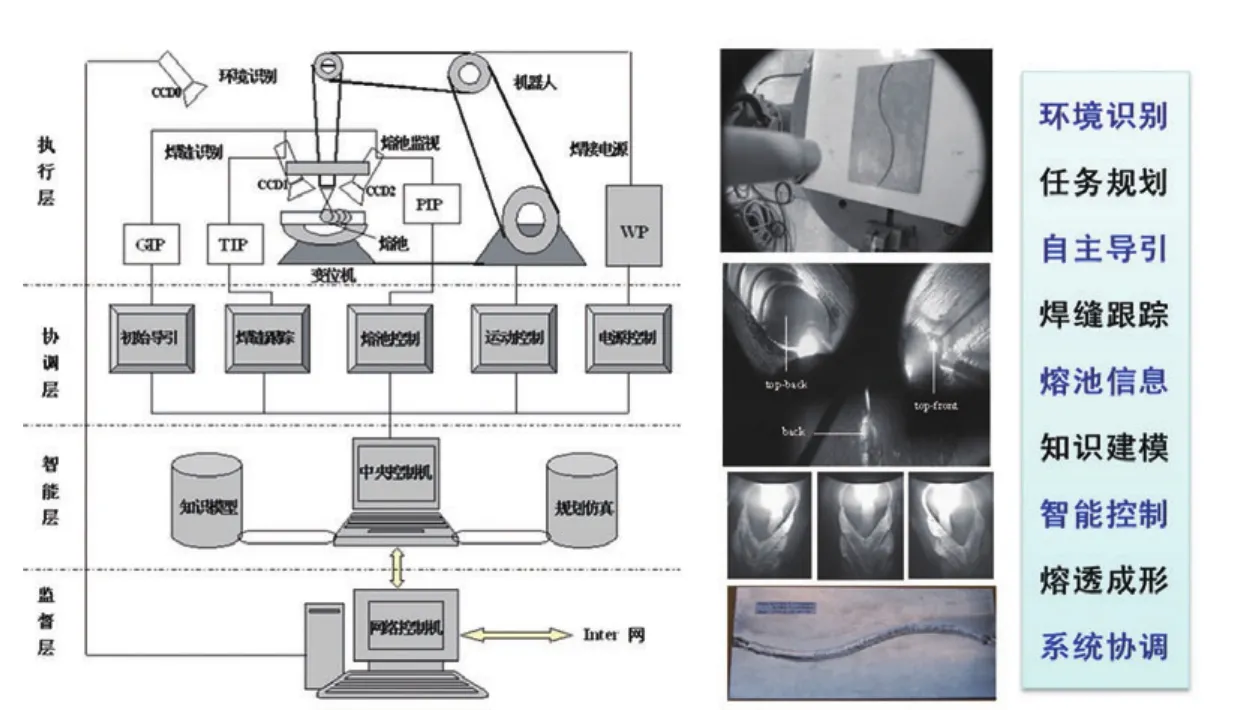
图2
图3

图4
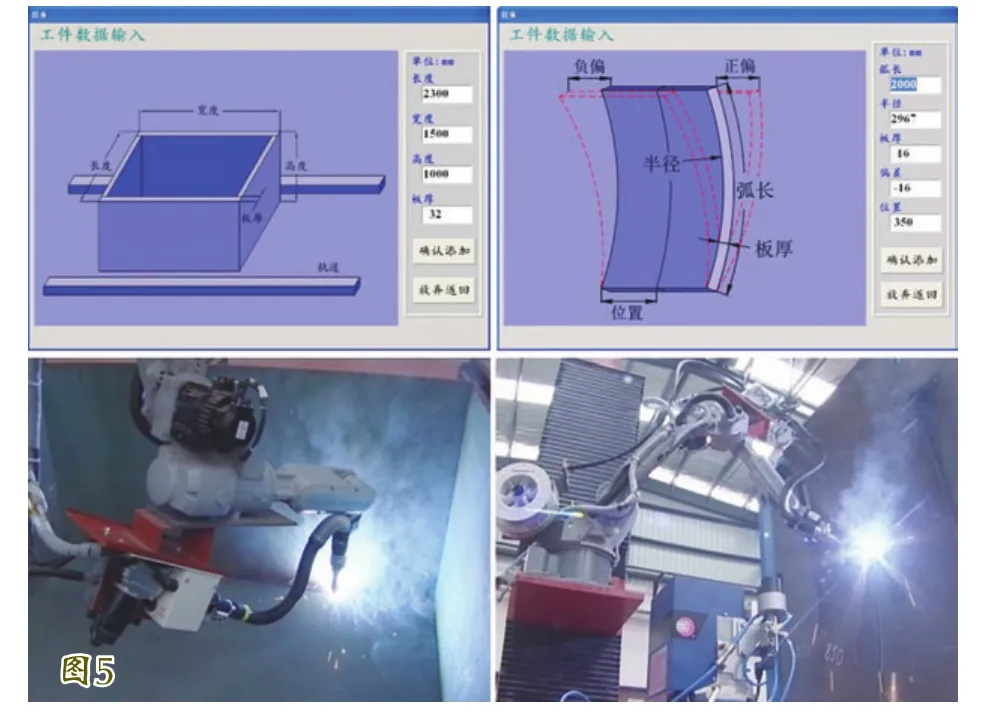

图6
结合上海振华重工(股份)集团公司“海上钻井平台装备制造智能化焊接车间”(发改办高技[2012]2144号)项目平台建设,针对海洋能源装备自升式钻井平台桩腿焊接智能化制造需求,开展了Q690高强钢双机器人双弧立焊新工艺及智能化焊接系统的研究,见图6。
针对航天铝合金薄壁结构件,联合上海航天精密机械研究所开展了航天器新型铝合金结构件机器人焊接智能化系统关键技术研究。研制的系统可实现初始焊接位置导引、焊缝跟踪以及熔透控制,见图7。
针对传统接触传感器在机器人初始寻位中的应用局限性,基于实验室多款机器人系统平台开发了视觉寻位传感系统,自主开发了能够自适应环境变化的焊缝起始点寻找快速、精确和鲁棒性好的图像处理算法,见图8。

图7
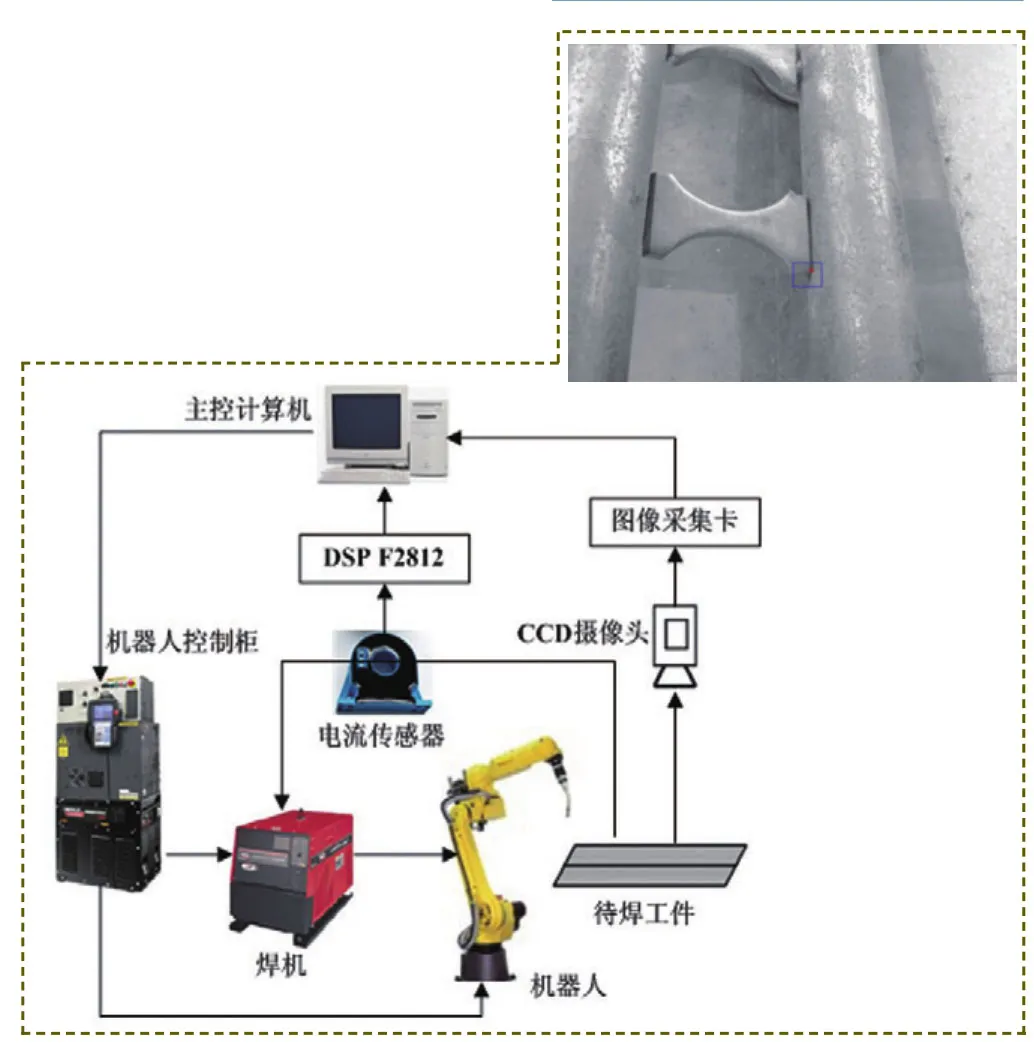
图8
二、团队组成
实验室以教育部长江学者陈善本教授领衔,包括“第九批千人计划”——新西兰坎特伯雷大学的陈小奇教授加盟的“机器人焊接智能化技术”研究团队共有30余人。其中全职教师5人,国外客座研究员1人,兼职教师3人、博士后2名,博士生15名,硕士生10余名。
三、研发设备
实验室拥有9自由度KUKA机器人柔性制造系统、ABB机器人系统、KEMPPI、OTC、LINCOLN以及BINZEL焊枪等先进设备、日本FANUC机器人及其视觉系统、日本安川MOTMAN焊接机器人及其变位机协调系统、自行研制开发的7自由度局部自主智能化焊接机器人系统、863项目支持的“轮足组合越障全位置自主焊接智能机器人系统”,以及Deneb机器人仿真系统软件。实验室现有多套自行研制的焊接动态过程视觉传感和图像处理算法软硬件设备、焊接动态过程声音传感、电弧传感和信号处理系统以及智能控制实验平台以及其他焊接过程模拟计算软件,可以方便开展焊接熔池动态过程的视觉、声音、电弧温度、光谱等特征信息获取、知识建模与智能控制方法研究系统实验,见图9。

图9
实验室在焊接动态过程信息采集与处理的传感系统仪器设计与研发方面,曾研制了可用于碳钢和铝合金的两光路、三光路多款脉冲TIG焊熔池区视觉传感器,可用于智能化焊接机器人及专机并针对TIG、MIG焊接工艺的多款单目、双目视觉传感器,并已获得了多项国家发明专利且有部分转让应用。
四、合作机构
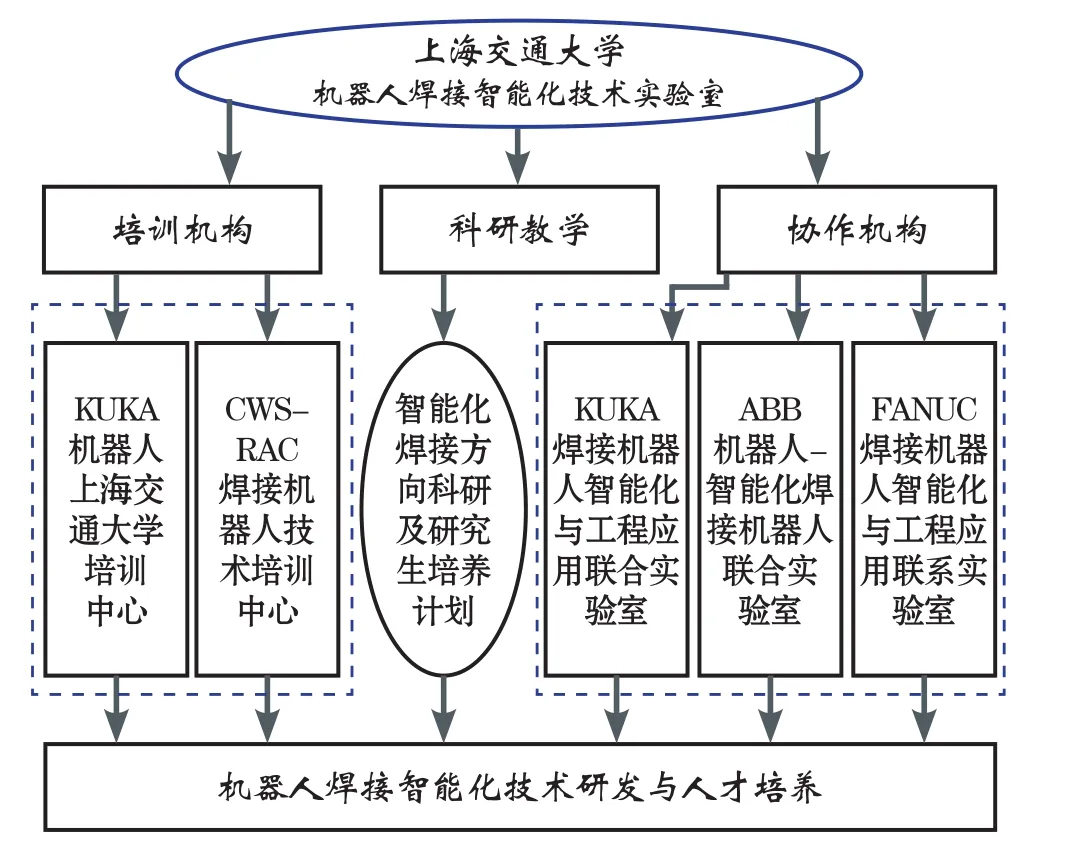
上海交通大学机器人焊接智能化技术实验室分别与KUKA、ABB、FANUC和KEMPPI等国际知名企业建有焊接机器人智能化技术研发与应用联合实验室;与KUAK公司建有“KUKA-上海交大机器人培训中心”,面向各类交大学生培训工业机器人编程技术;与中国机械工程学会焊接学会机器人与自动化专业委员会共建“CWS-RAC焊接机器人技术培训中心”面向全国焊接行业从业人员培训机器人焊接操作技术。实验室的组织机构图示:
联系方式:
联系人:陈华斌副教授、博士
地址:上海市东川路800号材料F楼(邮编:200240)
上海交通大学机器人焊接智能化技术实验室
电话:021-34202740-807
网址:http://rwlab.sjtu.edu.cn
Email:hbchen@sjtu.edu.cn,rwlab@sjtu.edu.cn