自抗扰控制技术在火电厂主汽温度控制上的仿真应用
2013-08-03陈树昌
李 洋 陈树昌 方 元
(华北电力大学 控制与计算机工程学院,河北 保定071003)
0 引言
在超临界大型火电机组中,主蒸汽温度的控制直接影响机组运行的稳定性与经济性。目前主蒸汽温度控制一般采用传统串级PID 控制方案。 随着控制品质与精度的要求越来越高,对象复杂程度也是与日俱增, 仍然采用传统串级PID 方案控制难以达到令人满意的控制效果。为了弥补这一不足,自抗扰控制技术应运而生,本文建立一种基于自抗扰控制器的一种主汽温控制方案,并在simulink 仿真平台上进行仿真试验。
1 自抗扰控制基本原理
自抗扰控制器由跟踪微分器(TD)、扩张状态观测器(ESO)、非线性误差反馈控制律(NLSEF)三个核心模块构成。
1.1 跟踪微分器
跟踪微分器的作用是对给定的输入信号v0产生输入信号的跟踪信号和输入信号的微分信号。
1.2 扩张状态观测器
扩张状态观测器的作用是对控制量u 和输出信号y 作为两个输入进行观测,得出两个估计状态变量和对系统内扰和外扰的总扰动估计值。
1.3 非线性误差反馈控制律
TD 产生的跟踪信号和微分信号与ESO 两个估计量做差。 合理调节两个误差量系数通过一个非线性计算形成控制信号u0。
2 针对主汽温的自抗扰控制仿真试验
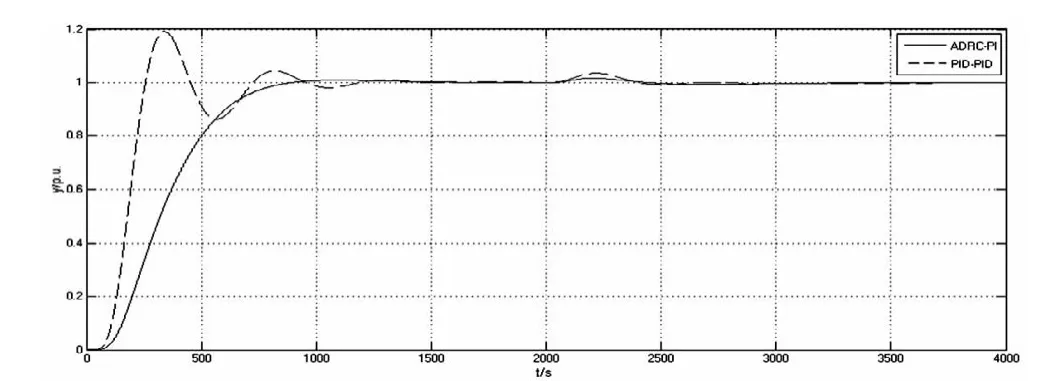
图1 两种控制器的阶跃扰动响应曲线对比
本文采用串级控制策略,主回路采用ADRC 控制器,副回路采用PID 控制器。 在simulink 上搭建仿真模型。 导前区惰性区选取文献[1]75%负荷下模型。 控制器参数设定好后进行阶跃响应和扰动试验:输入单位阶跃信号, 设置仿真时间为4000s, 在2000s 处加入一个幅值w=0.8 的减温水侧阶跃扰动,两种方案系统响应曲线如图1。
仿真结果表明, 两种控制方案都能达到稳定控制目的。 PID-PID控制开始响应速度比较快, 但是波动幅度太大, 且调节时间明显比ADRC-PID 调节时间长。 在同等情况的扰动下,ADRC-PID 控制扰动幅度更小且调节时间更快,显示出了更好的抗扰动能力。
鲁棒性试验:两控制器参数不变,将主汽温被控对象分别设置为额定负荷37%、50%、75%、100%下的动态模型, 单位阶跃输入下响应曲线如下(图2):

图2 自ADRC 在四种额定负荷下鲁棒性响应曲线对比
仿真试验结果表明, 除37%额定负荷下响应曲线振荡时间较长,超调量较大,其余三种额定负荷曲线过渡时间都比较短,没有出现较大振荡。但四条曲线最终都会达到平稳状态,没有出现发散结果。所以具有很强的鲁棒性。
3 结论
通过simulink 仿真试验结果可以看出自抗扰控制技术在大迟延、大惯性、 扰动多等特点的主汽温度控制系统中显示了很强的抗干扰性、适应性和鲁棒性,达到了更好的调节品质的目的,具有很好的应用前景。
[1]范永胜,徐治皋.基于动态特性机理分析的锅炉过热汽温自适应模糊控制系统[J].中国电机工程学报,1997,17(01):23-28.