面向交通环境的参数检测智能小车系统研究
2013-07-30曹成孝
曹成孝
(浙江省衢州市公安局交警支队 机动车安全检测站,浙江 衢州 324000)
1 引言
伴随着城市的不断发展进步,各个地区的交通繁忙情况日益凸显,而且交通事故的发生率也有不断攀升的趋势,因此对于交通环境参数检测的要求也就越来越迫切。如何可以更加有效的对交通系统进行分析,科学的管理现有的交通网络,是改善城市交通环境的首要难题。
智能小车拥有环境感应、数据搜集以及规划管理等多种先进功能,如果对其功能加以善用,就可以实现其用于交通环境参数检测的功能。更值得关注的是,智能小车比常用的交通环境检测设备快捷、高效、低成本。
2 智能车简介
2.1 何为智能车
智能车绝不是我们普通印象中的类似科幻片中可以自动驾驶的车辆,它是指那些拥有完善的导航系统,并且具有全球定位功能,以及可以接受信息中心传来的资料信息的新型车辆。
2.2 智能车的应用
这类车辆的在民间的使用多是可以保证车辆使用人在安全的条件下进行驾驶,通过其对道路交通环境的参数检测以及系统中的交通数据资料进行分析,提供给驾驶者最为安全的驾驶选择。同时,其可以快速的分析当前的道路交通现状,周围行驶的车辆状况等信息,准确的给出最适合的行驶对策,是驾驶中相当重要的辅助因素。
3 参数检测系统研究
3.1 系统设计原则
该类系统的设计牵涉到许多方面的协调,因此是一项十分负责的工程,虽然如此,但是在设计的过程中仍然有一些基本的原则需要遵循,作者对这些原则进行了大概的总结和归纳。
首先,系统的道路交通环境参数检测需要利用到GPS系统、电子传感器系统以及数据搜集系统。这些在整个的智能交通平台开发和研究中不可或缺,可以为交通平台的运作提供良好的检测平台。该系统的核心作用是:即时搜集多项车载传感器所提供的交通环境参数,同时依据系统预设格式妥善的储存这些数据;利用系统中设置的各类传感器信息分析算法针对每个传感器所采集的参数进行数据数学处理,从而验证各种多传感器信息融合算法,同时在验证的过程中还能够进一步的对比各种算法自身的优势与不足,不断地改善和升级系统算法;上述算法综合计算出来的最终结果对于提高定位系统的准确度,提高数据采集系统的稳定性,以及提高对周围交通环境参数的检测都有重要的积极作用,通过这些结果驾驶者可以得到更加明晰的驾驶指引。
3.2 参数检测系统实际应用案例
(1)智能车参数检测开发虽然仍属于一个比较新的科研领域,但是国内已经有科研机构对其进行了探索。下图就是国内的科研机构由自己的科研团队自主开发的智能车参数检测实例。
该研究团队自行开发的智能车基础平台。该项目的研究目的就是在真实可靠的平台基础上,针对真实的道路交通环境、针对现代交通网络对于环境参数检测以及监控的要求,分析智能车在定位和对周围交通环境的感知能力。系统设计中还分别标注了该系统中各个传感器的设置,并将其划分为定位和环境感知两大基本类型。该项目针对算法的科研重点是利用多种不同功能传感器的协调配合,最大程度上实现高精准的定位、地图绘制、不固定周边因素的检测统计以及归类。
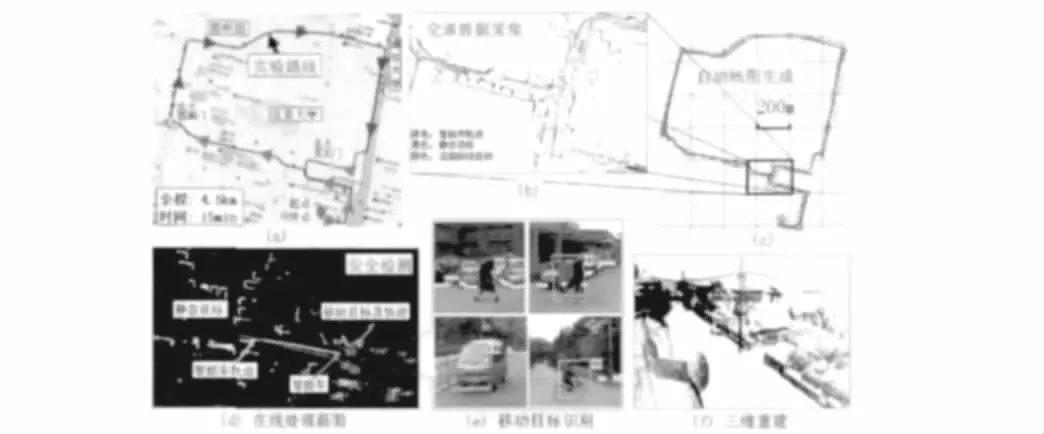
图1 系统具体功能
(2)系统在其基本的设置基础上,通过科研团队的调试与修正,最终成功的实现了图2所标注的各项功能,下面我们分别来对其进行具体分析。
图1(a)是团队选择的测试路线。该智能车以英杰交流中心为始发点,经由图中箭头标注的路线,进行整个测试路线的行驶,在这一过程中系统的各个组件功能全部开启,行使自己的设定功能,这段测试路线的长度为4.5Km。试验车由科研组成员负责驾驶,融入线路中的正常车辆之中,线路全程所需时间大概17分钟。这次线路测试的目的就是要检验系统中预设的算法的准确性,具体来说就是高精准的定位、地图绘制、不固定周边因素的检测统计以及归类。图1(c)是采集定位数据和激光扫描所得数据,图1(b)是将采集结果整合之后的画面放大图像,图像中不仅显示了环境的固定信息,比如:绿化、建筑等;还显示了环境的可变信息,比如:路上行人位置的变动、周围车辆的分布情况、周围车辆的移动速度、周围车辆的移动方向等,以上这些数据对于交通网络的智能管理有很大的帮助,提供了基础数据流。图1(d)是系统通过对上述采集数据的分析之后,给出的行驶建议画面,其中显示了试验车在本过程中的历史行驶数据和当前所处具体位置的数据,同时还提供了对环境的固定信息的检测结果、环境的可变信息的检测结果等综合数据。经过以上的数据处理,驾驶者可以得到最好的安全提示数据,从而进行最优的驾驶方案选择。图1(e)则对移动目标的识别过程进行了影响分析,对移动目标的记录数据进行整理。图1(f)是最终通过对实验所有数据的整合而重建出的三维实景图。
4 结束语
综上所述,智能车系统对于道路交通环境参数的检测有着巨大的帮助,是未来智能交通网络管理的发展大趋势,值得行业内的企业以及机构加大科研力度。因为其牵涉到很多方面的工作,是一项复杂的系统工程,因此各个部门之间的合作也十分关键。最后,这毕竟是一项较新的科研领域,还有很多深层次的问题需要进一步的研究和探讨,希望大家共同努力来提升我国在这方面的科研水平。
[1]田强;姬长英;单片机和THB6128构成的步进电机控制器设计[J];江西农业学报;2010年05期
[2]尹念东;智能车辆的研究及前景[J];上海汽车;2002年04期
[3]朱建林;郭有贵;上位机与下位机通信的设计初步[J];可编程控制器与工厂自动化;2005年01期
