利用全极化SAR数据去方位向模糊的舰船目标检测方法
2013-07-25魏钜杰李平湘张继贤
魏钜杰,李平湘,杨 杰,张继贤
1.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079;2.中国测绘科学研究院,北京 100830
1 引 言
近年来,利用SAR图像进行舰船目标检测的研究在海洋遥感领域得到高度重视,成为SAR数据重要的海洋应用之一。对于单极化SAR数据而言,传统的检测方法主要是CFAR(constant false alarm rate)检测算法,典型的如双参数CFAR(2P-CFAR)算法和基于 K分布的CFAR检测算法。但由于海面后向散射受风场、船只运动情况和各种海洋现象的影响,海杂波空间分布往往表现为各向异性,很难用统一的杂波统计模型描述,针对此问题,文献[1—2]提出了分形检测方法,将各向异性的海面分布分为多个各向同性区域,然后在每个小区域内应用各种类型的CFAR探测器;文献[3]分析了舰船目标与海杂波的特征差异,提出了一种利用舰船目标的亮度强相关性和2D联合Log-normal概率分布模型的CFAR检测算法,降低了由相干斑噪声和背景杂波局部各向异性引起的虚警。随着极化SAR数据的应用,文献[4]采用最优极化状态组合进行船只检测研究;文献[5—6]采用3种不同的通道融合技术(minimum mean square error技术、SPAN技术和PWF技术)和3种不同的CFAR探测器(CA-CFAR、2P-CFAR、G-GLRT),通过模拟数据和多幅L波段SIR-C极化数据进行了比较分析[5-6]。但这些方法仍是利用舰船目标与海杂波在SAR图像上的对比度差异进行舰船目标的检测,并没有克服单极化SAR传统CFAR检测算法的固有缺陷。
另外,在海面和舰船目标成像过程中,雷达极化方式、海况的复杂程度、舰船的规格大小及其运动情况等因素都直接影响了舰船目标与海杂波的目标杂波比(target to clutter rate,TCR)。为了检测目标杂波比较低的船只,文献[7]基于雷达干涉测量的思想提出了一种子孔径相干的海上舰船检测方法。文献[8]在文献[7]的基础上加以改进,提出了2L-IHP(two looks internal hermitian product)目标检测方法。文献[9]采用二维相关函数(two dimensions cross correlation function,2D-CCF)进行子孔径相干,实现了海面舰船目标的检测,并使用Radarsat-1数据证明了该算法的有效性。文献[10]证明了二维卷积函数(two dimensions convolution function,2D-CF)与2DCCF的等价关系,并利用不同极化通道信号间的二维卷积进行舰船目标检测,同时文中模拟了共极化通道间的卷积受舰船大小、形状和海况的影响程度,并对Po1SAR数据进行分析,发现此方法大幅度地提高了船海对比度,对海况变化不敏感,比较适合高海况下舰船目标检测。文献[11—12]分析了子孔径的全极化特性,认为在全孔径SAR图像中存在严重的非平稳散射现象,并提出了基于Wishart分布的最大似然估计方法来消除非平稳散射现象,实现在极化SAR图像的目标检测。
然而,在成像过程中,某些情况下,因雷达发射的脉冲重复频率(pulse repetition frequency,PRF)过低,目标回波信号的多普勒频谱欠采样,产生了方位模糊噪声[13-17]。此时若直接采用传统的CFAR和子孔径相干的目标检测方法,方位向模糊噪声往往会被误判为舰船目标。文献[18]结合模拟数据和CV-580PolSAR数据研究发现了运动目标会在其方位向上产生方位向模糊甚至发生位移;文献[19]利用PolSAR数据对运动目标进行了时频分析;文献[20]进一步研究了方位向模糊噪声产生的原因,利用|HV-VH|实现了潜在运动目标/舰船的检测。文献[21]基于H-AAlpha目标分解,分析了全极化SAR数据舰船目标及其方位模糊噪声、海杂波的极化散射特性,并提出了一种基于极化散射特征的舰船目标检测方法,利用第一特征值λ1区分海杂波和舰船目标,并利用舰船目标及其方位模糊噪声的第三特征值λ3的差异性进行二者的区分,得到了较为理想的试验结果。但该文献并未考虑当方位向模糊噪声的第三特征值λ3与其周围其他弱小舰船目标相近时,在设定一定阈值的情况下,同样会出现目标漏检或虚警的情况。针对此问题,本文提出了一种新的基于全极化SAR数据去方位向模糊噪声的舰船目标检测方法。
2 方位向模糊产生的原因
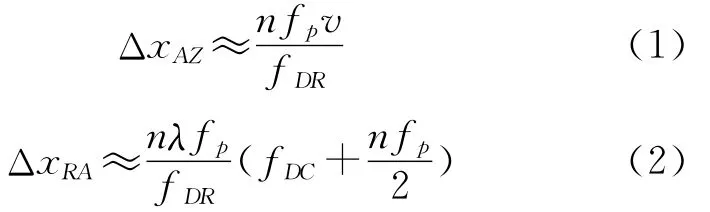
在SAR成像过程中,利用目标相对于雷达运动的多普勒频率进行方位向压缩来提高方位向分辨率。方位向压缩所采用的匹配滤波器通常在主瓣多普勒带宽BD内,Bp为处理器的方位向频谱带宽。由于多普勒效应,回波信号沿方位向可以等效为一个线性调频信号。而且,这个线性调频信号的方位多普勒频谱是被方位向的天线方向图加权的,并且用发射脉冲的重复频率PRF来采样的。一般情况下,天线方向图都存在着旁瓣,旁瓣处的信号处于比较高的频段上。当PRF较高时,旁瓣处的信号相对于主瓣来说很弱,因此不会出现明显的模糊现象;当PRF较低时,旁瓣处高于脉冲重复频率的多普勒信号频谱将折叠到滤波器带宽内,造成与主信号频谱的混叠,从而产生明显的方位模糊,如图1所示。总之,方位模糊产生的根本原因是由天线方向图存在旁瓣效应,发射的PRF过低,回波信号的多普勒频谱欠采样引起的。旁瓣信号是潜在的模糊信号,PRF过低时就会使这个模糊信号显现出来[14,19,22]。
通常模糊噪声与真实目标在方位向和距离向的位置误差[21]分别为
式中,n表示方位向模糊个数;v表示传感器平台相对于目标的速度;fp表示发射脉冲的脉冲重复频率PRF;fDC和fDR分别表示多普勒中心频率和多普勒调频率;λ为雷达波长。
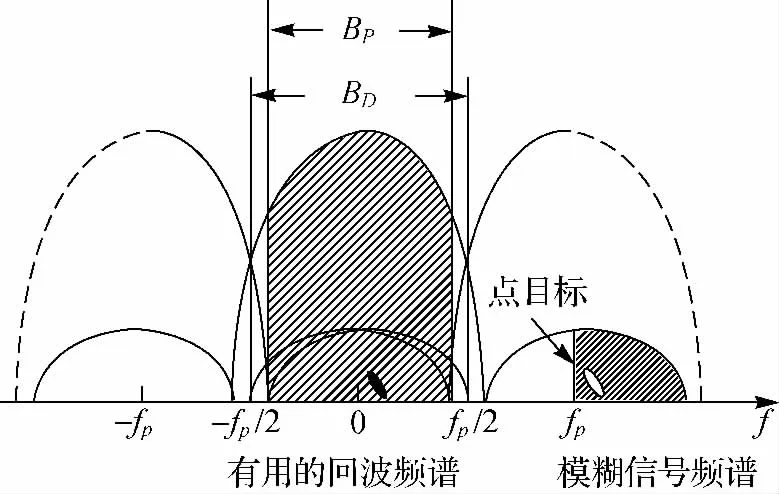
图1 当BD=PRF时的方位向模糊示意图Fig.1 Azimuth ambiguity sketch map when BD=PRF
由式1、式2可知,模糊噪声与真实目标间的空间位移随着雷达波长的增大而增大,同时波长越短,被聚焦的模糊能量就越多,其峰值就会增大,强度也就越高,因此,短波长的方位向模糊噪声明显比长波长的严重。另外,二者间的位移虽然随着n的增大而增大,但其相应强度却因能量散焦而减小,因此通常可观测到的模糊数为n≤2。
3 舰船检测理论方法
当海况比较低、入射角在20°~80°的范围内时,海面主要表现为Bragg散射,而舰船的散射类型主要包括二面角、窄二面角、1/4波能装置、偶极子散射和柱面散射等[4,10,23]。由于海杂波和舰船目标的后向散射特性存在着较大的差异,且这种差异具体表现在Sinclair散射矩阵S2、协方差矩阵C3或相干矩阵T3中。因此,通过对矩阵进行极化目标分解,把随机介质的平均散射矩阵表示成几个独立项之和,并将每一项都与一定的物理机理联系起来,可以找出它们的极化散射特征差异,从而将舰船目标与海杂波区分开来。
文献[23]基于相干矩阵的特征矢量分析,提出了能够包含所有散射机理的极化目标分解方法,之后,文献[24]又进一步提出了 H-A-Alpha分解方法。文献[25]对此分解方法给出了高度评价,指出该分解方法比文献[26]的分解方法更独特,其得到的极化参数物理意义明确,和目标的散射机制紧密相连,是目标特性分析的基本工具。因此,本文首先利用H-A-Alpha方法对极化相干矩阵T3进行目标分解,接着对获得的第3种散射机制进行PolSAR方位向子孔径分割,然后利用2D-CCF相关函数对子孔径SPAN功率图进行相关计算,最后设定阈值进行目标检测,其技术流程如图2所示。
图2 本文检测算法技术流程Fig.2 Detection algorithm work flow
3.1 H-A-Alpha分解的基本原理
由于相干矩阵T3是Hermitian半正定矩阵,因此可以通过单位相似变换进行对角化[27-28]

式中
式中,Σ是具有实特征值的对角阵,且λ1≥λ2≥λ3≥0;U3是特征向量矩阵,其列向量u1、u2和u3相互正交,与散射过程有关,列向量中的5个角度参数αi、βi、φi、δi和γi表示的物理意义分别为:αi∈[0 ,9 0°],表 示 目 标 的 散 射 机 制;βi∈[-180°,180°],表示目标关于雷达视线的方向角;φi、δi和γi表示目标的相位角。
因此,相干矩阵T3也可以写为如下形式
且Pauli特征矢量或目标散射矢量k[27-28]为

由公式(7)可知,相干矩阵T3可以分解为3个相互正交的相干矩阵的加权和,且这3个相干矩阵分别代表了3种相互独立的散射机制。特征值λ1、λ2和λ3决定了目标的3种散射机制的贡献值。
3.2 子孔径相干的基本原理
在SAR图像合成过程中,该图像的每一个像素的获取都是经历了一段相对较长的合成孔径时间。在这个时间内,同一目标的许多低分辨率的回波响应被合成,从而形成高分辨率的图像,这些低分辨率的回波分别对应着不同的多普勒频谱。相反的,通过多普勒频率的分解同样可以将合成后的高分辨率图像分解为一系列低分辨率的子孔径图像[17,29]。
在合成孔径时间段内,对于理想的点目标(舰船目标)而言,其幅度和相位变化不大,子孔径影像间的相干性较强;而海洋是连续变化的,其相干性较弱。另外,在方位向模糊区,H-A-Alpha分解结果中的第三特征值较弱[21],但仍影响其周边弱小舰船目标的检测。为了检测弱小舰船目标,本文在H-A-Alpha目标分解的基础上,引入子孔径分解的思想,对目标分解获得的第三散射机制在方位向上进行全极化子孔径二视分解;接着利用SPAN技术分别对全极化子孔径1、子孔径2进行通道融合,然后基于2D-CCF相关函数(式(10))对二者进行相关计算,以便有利于抑制方位向模糊噪声,提高海杂波和舰船目标间的对比度。

式中,f1、f2分别表示全极化子孔径1和子孔径2的SPAN强度影像。
子孔径分解技术[8-9]可视为合成孔径成像的逆过程,图2中的虚框内容显示了其处理流程,具体的分解过程可归纳如下:
(1)将原始影像在方位向上通过傅里叶变换转换到多普勒频率域。
(2)估计权重函数,可通过在距离向上求取多普勒频谱幅度的平均值获得。
(3)计算、归一化纠正函数,利用权重函数和一维滑动窗口,求取窗口内的多普勒频率均值,获得纠正函数,同时比较获取最大均值,利用最大均值对纠正函数进行归一化处理,获得归一化纠正函数,其目的是确保纠正后的多普勒频谱的最大值保持不变。
(4)将归一化后的纠正函数作用于多普勒频率域,纠正多普勒频谱,消除天线权重的影响。
(5)根据所需子孔径个数,对纠正后的多普勒频谱进行分割,同时利用hamming窗口对各子孔径频谱进行加窗处理,消除点目标脉冲响应旁瓣的影响。
(6)各子孔径频谱通过傅里叶逆变换,转换得到相应的子孔径影像。
3.3 检测步骤
基于3.1节、3.2节介绍的相关理论知识,结合图2显示的技术流程,将本文提出的消除方位向模糊噪声的舰船检测算法的基本步骤归纳如下:
(1)基于 H-A-Alpha目标分解方法,对原始全极化SAR数据的相干矩阵T3进行目标分解,得到代表3种相互独立散射机制的特征向量ui和特征值λi。
(2)利用第3种散射机制的特征向量u3,根据公式(8),列方程求解物理参数α3、β3、φ3、δ3和γ3。
(3)结合特征值λ3、物理参数和散射目标矢量k公式(9),计算第3散射机制相应的S2散射矩阵。
1.2.1结构组成 矢状面基座1;垂直调节杆2;矢状面角度调节器3;连接杆4;水平面位移调节器5;进针点定位支架6;进针点垂直调节杆7;水平面角度调整轨道体8;螺钉定向通道体9;固定卡块10;按钮11;位移行程锁定按钮12;滑动角度锁定按钮13;圆弧形轨道81;滑动体91。
(4)利用PolSAR子孔径分解方法,分别对S2散射矩阵的4个元素SHH、SHV、SVH和SVV在方位向上进行子孔径二视分解,获得全极化子孔径1的散射矩阵S2-sub1和全极化子孔径2的散射矩阵S2-sub2,同时计算二者相应的SPAN功率图。
(5)基于相关函数2D-CCF,对子孔径1和子孔径2的SPAN功率图进行相关计算。
(6)利用相关计算结果,设定阈值,进行舰船目标检测。
4 试验分析
4.1 算法验证试验
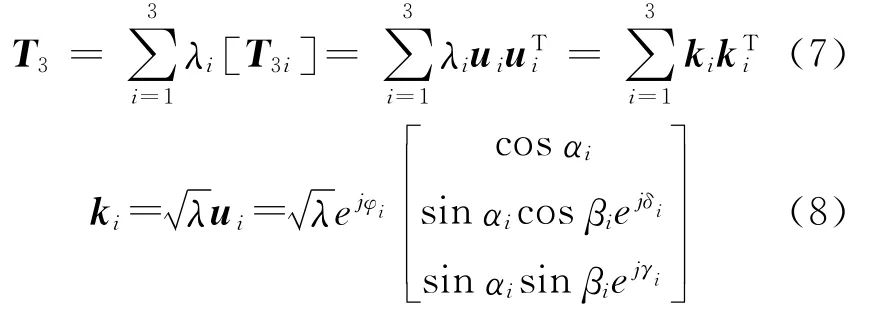
本文采用美国NASA/JPL的AIRSAR机载SAR系统于2000-10-04在日本玉野Kojimawan港口附近获取的C波段全极化数据进行试验。图3显示的是该数据经Pauli目标分解合成的RGB影像。该影像的中心经纬度分别为(133.921 6°,34.582 6°),飞机的飞行高度为8 120.8m,航迹角为5.1°,入射角范围为27.5°~62.6°,PRF为849.8Hz,方位向分辨率为4.629 6m,距离向分辨率为3.331 0m。为了验证本文提出的消除方位向模糊噪声影响的舰船检测算法的有效性,本试验选用该影像中黄框圈定的海域进行试验。并根据地基雷达的地面实测数据,在该海域用白色方框标识了海面实际共有的21个舰船目标,分别为T1、T2、…、T21。
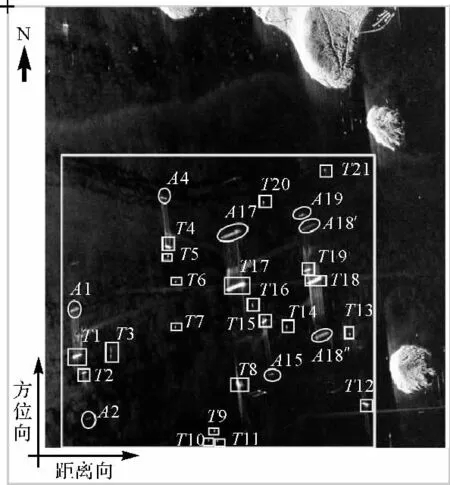
图3 C波段AIRSAR Pauli彩色合成影像Fig.3 C-band AIRSAR Pauli color coded image
由图3可见,部分舰船目标在其方位向上存在着高亮度的方位向模糊,如T1舰船目标对应了方位向模糊A1,图中用白色椭圆标识,二者的序号一一对应。这些高亮度的方位模糊,若直接采用传统的检测手段,往往会被误判为舰船目标,降低了舰船目标的检测精度。根据本文提出的检测算法,首先基于H-A-Alpha方法对原始全极化数据的相干矩阵T3进行目标分解,其分解结果如图4、图5、图6所示,分别代表了3种相互独立的散射机制。
比较图4、图5和图6并结合图3分析可知,第1、2散射机制在保留原有全部舰船信息的同时,仍明显存在高亮度的虚假目标信息,而在第3散射机制中,这些虚假目标的亮度则大幅度地降低。
图7显示了第3散射机制的SPAN功率图。为了更好地显示实验细节,选取图7中方框标识的对应区域(184像素×330像素)进行比较分析。如图8、图9分别为该区域原始数据和第3散射机制的SPAN功率图,其3维显示图分别对应图11、图12。比较图8、图9、图11和图12,可知图9、图12中T18的方位向模糊噪声A18′和A18″和T19的方位模糊A19的强度值都大幅度减小。因此,第3散射机制可作为区分舰船目标与其本身方位向模糊噪声的有效工具。虽然方位向模糊噪声降低了,但当其周围存在TCR较小的舰船目标时,如图12中T18的方位向模糊噪声A18″的强度值与其旁边的舰船目标T13、T14差异不大;另外,舰船目标周围还存在明显的拖尾噪声。此时残留的方位向模糊噪声和舰船拖尾往往会降低弱小舰船目标的检测精度。
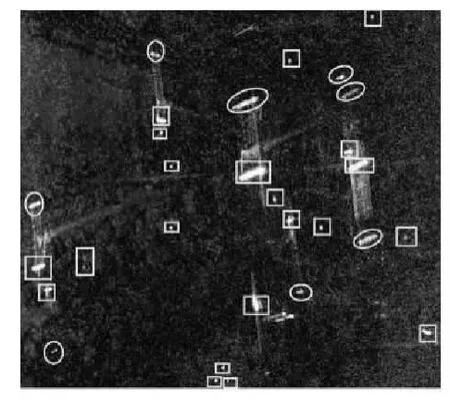
图4 第1散射机制λ1[T1]Fig.4 The first scattering mechanismλ1[T1]
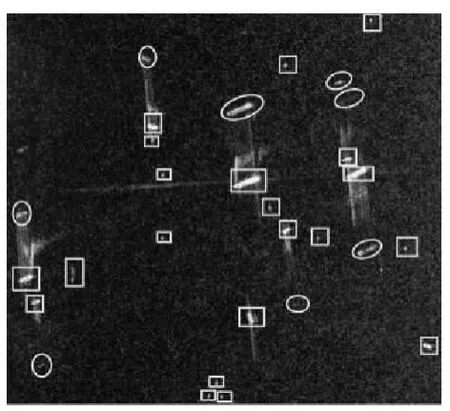
图5第2散射机制λ2[T2]Fig.5 The second scattering mechanismλ2[T2]
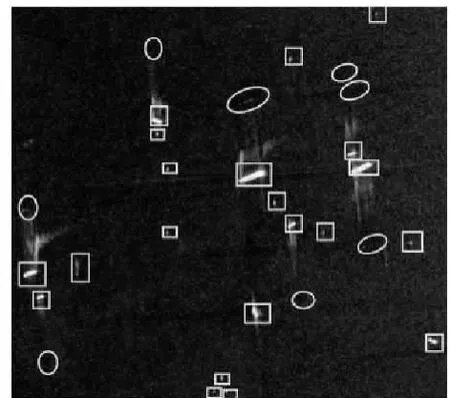
图6 第3散射机制λ3[T3]Fig.6 The third scattering mechanismλ3[T3]
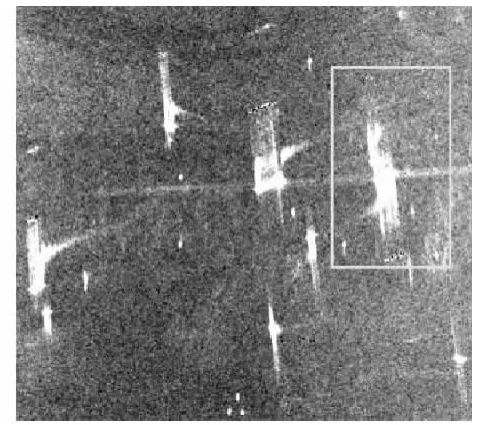
图7 第3散射机制SPAN功率图Fig.7 The SPAN of the third scattering mechanism
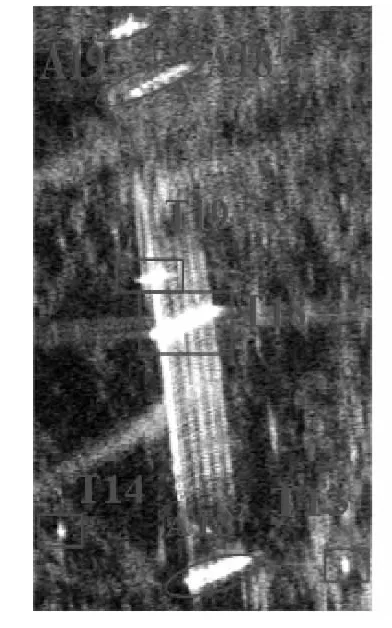
图8 原始SPANFig.8 Original SPAN
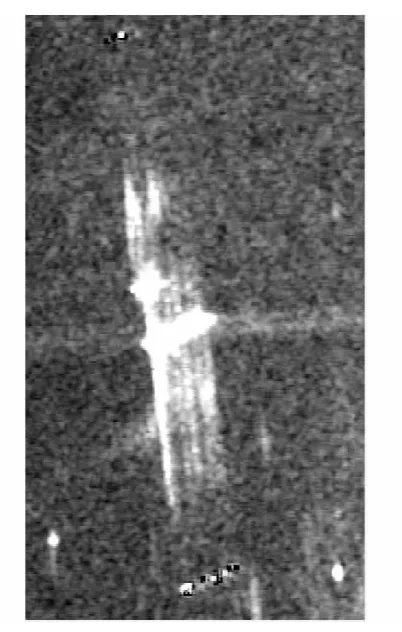
图9 第3散射机制SPANFig.9 SPAN of the third SPAN scattering mechanism
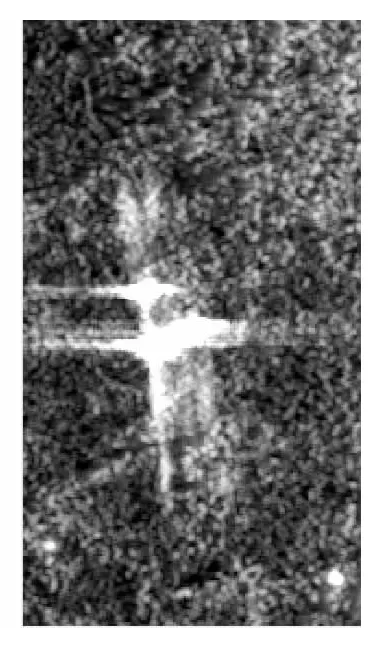
图10 相干图Fig.10 Intergram
为了抑制方位向模糊噪声和舰船拖尾噪声,提高目标杂波比,引入子孔径相干的思想,对计算得到的第3散射机制的S2散射矩阵的4个通道分别在方位向上分割为两个子孔径,得到子孔径1的散射矩阵S2-sub1和子孔径2的散射矩阵S2-sub2,图14、图15分别显示了子孔径1和子孔径2的Pauli彩色合成影像,图16显示了二者基于2D-CCF函数的相干结果。
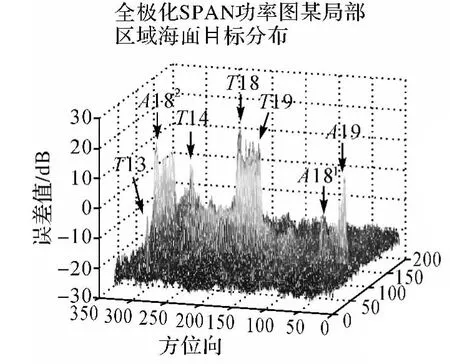
图11 局部原始SPAN三维显示Fig.11 Local original SPAN
同样的,根据图7中方框的圈定区域,从相干图(图16)中截取对应海域,如图10所示,图13显示了其相应的三维示意图。比较图9和图10、图12和图13,可知经过子孔径相干后,残余的方位向模糊噪声A18″和A19的强度值已得到理想地抑制。
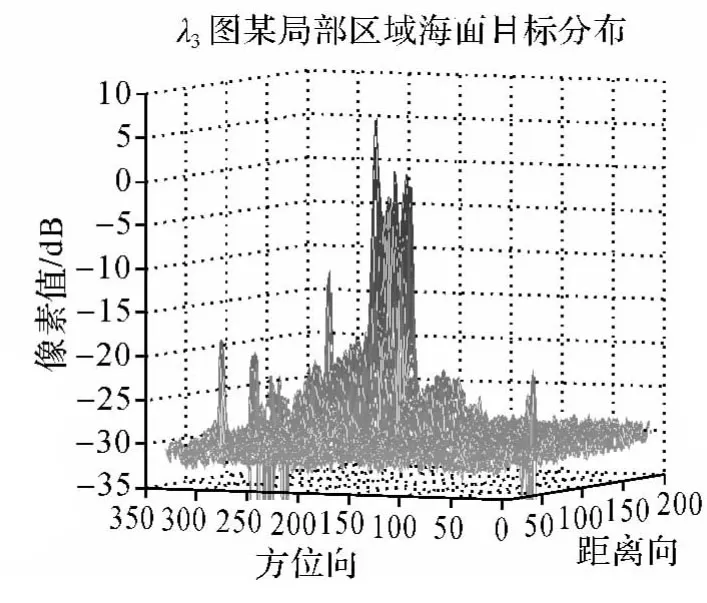
图12 局部第3散射机制SPAN三维显示Fig.12 Local SPAN of the third scattering mechanism
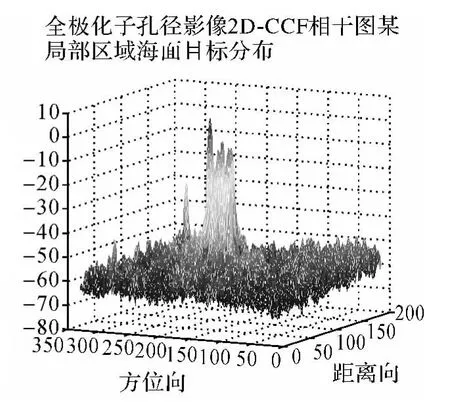
图13 局部相干图三维显示 Fig.13 Local intergram

图14 子孔径1的Pauli-RGB影像Fig.14 Subaperture 1Pauli color coded image
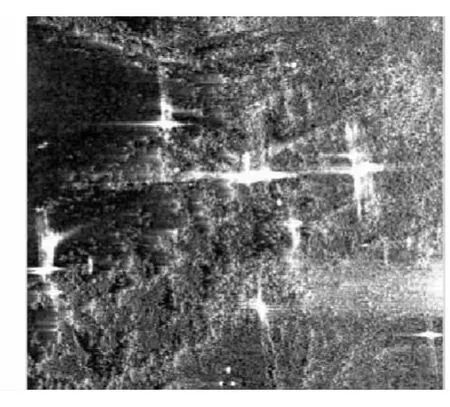
图15 子孔径2的Pauli-RGB影像Fig.15 Subaperture 2Pauli color coded image
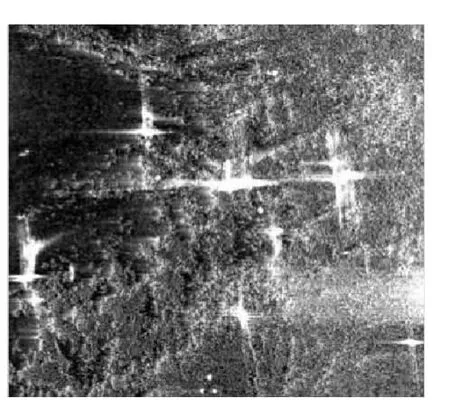
图16 2D-CCF相干图Fig.16 The result of crosscorrelation
同时,选取图9和图10距离向上的第72列采样数据,比较子孔径相干前后二者的目标杂波比,结果如图17所示。图17中的红线、蓝线分别表示第3散射机制和子孔径相干结果的目标杂波比TCR。红线的峰值(舰船目标)约为1dB,海杂波均值约为-30dB,而蓝线的峰值(舰船目标)约为-3dB,海杂波均值约为-60dB。可见第3散射机制的对比度约为31dB,而子孔径相干结果的对比度约为57dB,对比度提高了将近一倍。另外,将红线、蓝线方位向模糊噪声A18″峰值与其周围海杂波强度值进行比较,红线A18″峰值明显高于其周围的海杂波,而蓝线A18″峰值低于其周围的海杂波,从而证明了子孔径相干不仅大幅度提高了目标杂波比,而且明显地抑制了方位向模糊噪声。另外,比较图7和图16,子孔径相干还较为理想地抑制了舰船目标的拖尾现象。
另外,为了更进一步说明本文所提算法的有效性,分别从原始数据SPAN功率图、第3散射机制SPAN功率图和子孔径相干图中采集对应区域一定数量的海杂波、方位向模糊噪声和舰船目标的样本数据进行统计分析。图18、图19和图20分别显示了原始全极化SPAN功率图、第3散射机制SPAN功率图和子孔径相干图中的海杂波、方位向模糊噪声和舰船目标的样本数据分布直方图,图中横坐标表示样本数据像素值(单位为dB),纵坐标表示相对频率。
图18中,横坐标的数值范围为(-30~30),海杂波、方位向模糊噪声和舰船目标的像素值分布范围为(-28~8)、(-11~14)、(-11~22)。可见方位向模糊噪声的像素值范围与海杂波略有重叠,但很大程度上与舰船目标相互重叠,且方位向模糊噪声的直方图分布与舰船目标相似,从而也证明了方位向模糊噪声极易被误判为舰船目标。
图19中,横坐标的数值范围为(-50~20),海杂波、方位向模糊噪声和舰船目标的像素值分布范围为(-34~28)、(-50~24)、(-26~5),且方位向模糊噪声的像素值位于-24附近的频率最高,约为75%,而在像素值-24附近同样存在有部分弱小的舰船目标,从而也证明了当目标杂波比TCR较小时,弱小的舰船目标往往会被方位向模糊噪声淹没,降低了舰船的检测精度。
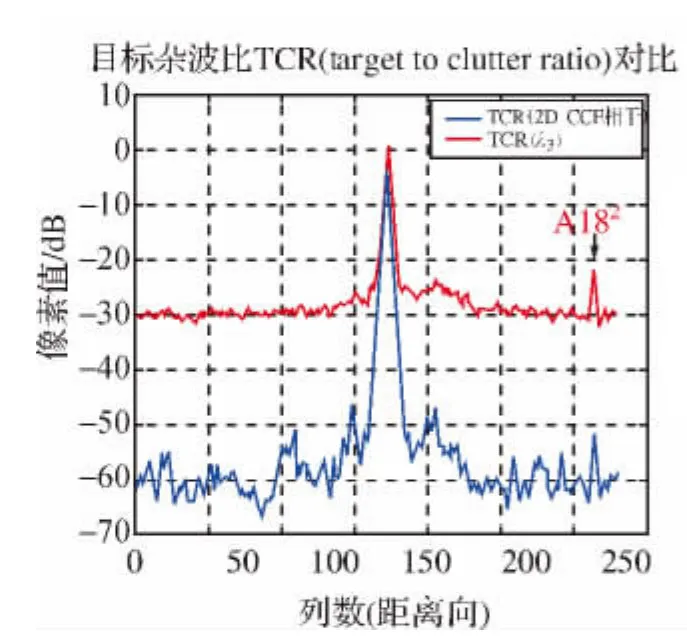
图17 λ3[T3]与相干结果的目标杂波比对比图Fig.17 The TCR of theλ3[T3]compared with the interference result
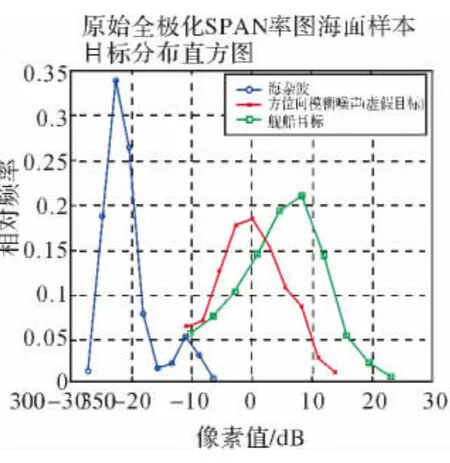
图18 原始SPAN图中海面布样本目标分Fig.18 Marine sample targets distribution of the orginal SPAN distribution
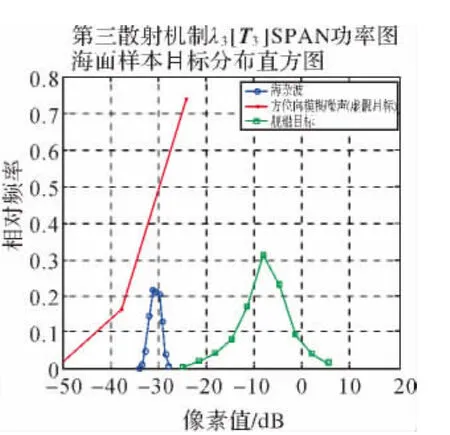
图19 λ3[T3]图中海面样本目标分布Fig.19 Marine sample targets ofλ3[T3]
图20中,横坐标的数值范围为(-80~10),海杂波、方位向模糊噪声和舰船目标的像素值分布范围为(-71~49)、(-69~43)、(-40~5),方位向模糊噪声分布与舰船目标存在明显的界线;而且,方位向模糊噪声的直方图分布与海杂波相似,且大部分重叠,从而证明了子孔径相干在很大程度上同时抑制了方位向模糊噪声和海杂波。
比较图18、图19、图20可知,子孔径相干不仅提高了目标杂波比,而且在很大程度上抑制了第3散射机制中残留的方位向模糊噪声,有利于后续的舰船目标检测。
最后,利用子孔径的相干结果,根据相干图中的海面样本目标分布直方图(图20)和相干图的三维示意图(图21),设置阈值为-42dB,则得到理想的舰船目标检测结果如图22所示。图中完全显示了实际共有的21个舰船目标T1、T2、…、T21,消除了方位向模糊噪声的影响,且虚警率几乎为0,从而验证了本文提出的舰船检测算法的有效性。
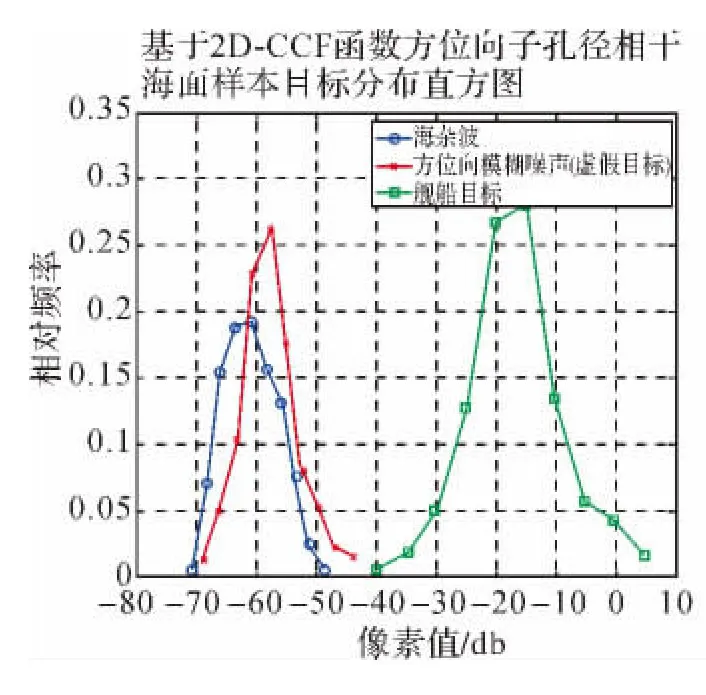
图20 相干图中海面样本目标分布Fig.20 Marine sample targets distribution of the intergram
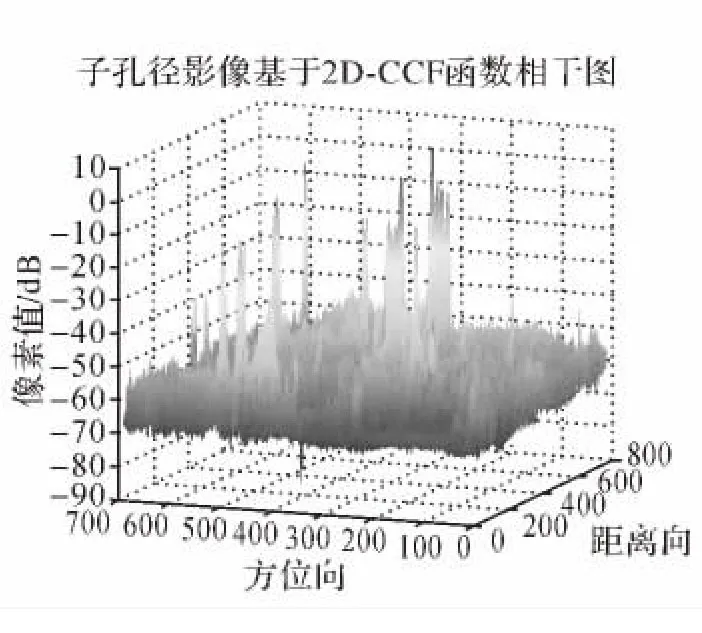
图21 相干图三维显示Fig.21 Intergram 3Ddisplay
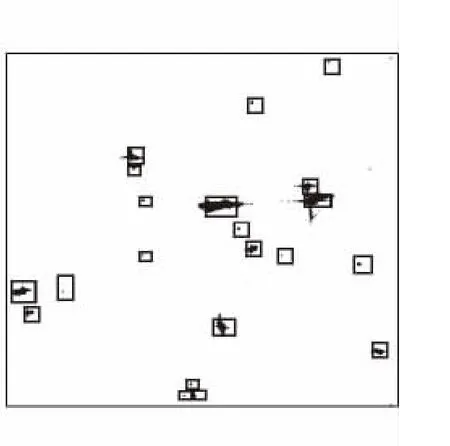
图22 舰船目标检测结果Fig.22 The result of ships detection
4.2 算法对比试验
为了进一步验证本文算法的有效性和可靠性,选择基于K分布的CFAR检测算法和文献[20]提出的基于极化散射特征的检测算法分别与本文提出的算法进行对比分析。
基于极化散射特征的检测算法,首先基于HA-Alpha方法对全极化SAR数据的相干矩阵T3进行极化目标分解。接着基于Alpha稳定分布的CFAR检测算法对第一散射机制功率λ1进行目标检测,得到初始的检测结果。然后利用第3散射机制功率λ3,并根据其相应灰度共生矩阵的均匀性,剔除方位向模糊噪声,得到最终的舰船目标检测结果,如图23所示。
基于K分布的CFAR检测算法,其处理过程是:首先采用SPAN技术进行通道融合,然后基于局部滑窗K分布的CFAR检测算法进行目标检测,其中滑窗大小设为51,目标窗口大小为7,警戒区的宽度设为7,虚警率大小设为0.000 1,其检测结果如图24所示。
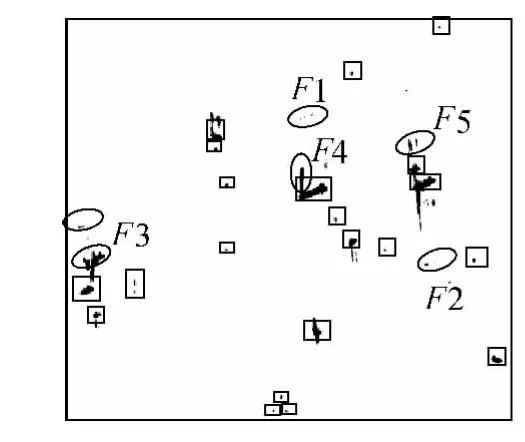
图23 极化散射特征的检测结果Fig.23Detection result based on PolSAR scatter characteristics
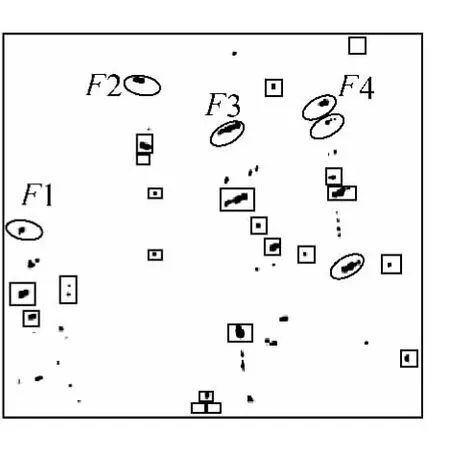
图24 K分布CFAR检测结果Fig.24Detection result based on K distribution CFAR algorithm
为了衡量各种算法的检测效果,比较3种算法的检测结果见图22~图24,并采用检测概率Pd和品质因数FoM,进行定量比较分析,统计结果如表1所示。
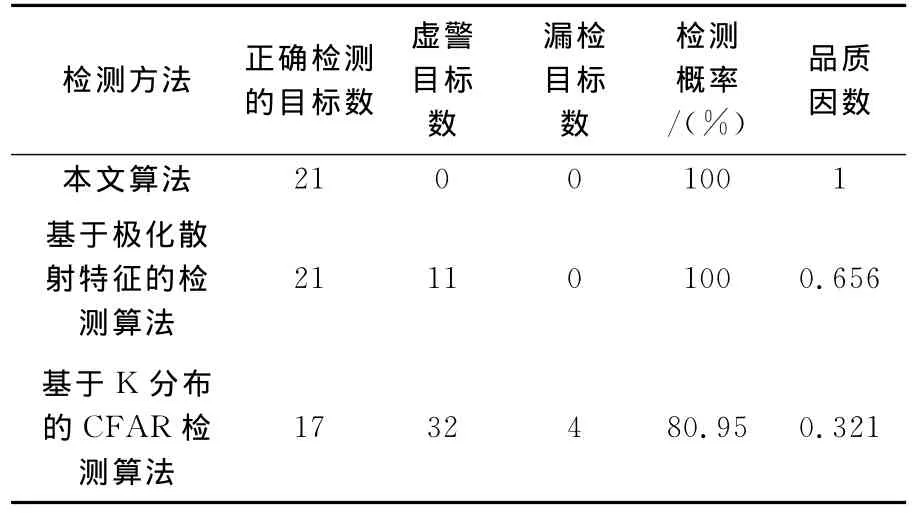
表1 3种算法检测结果的精度统计表Tab.1 The accuracy statistics of the three algorithom detection results
式中,Ntt为检测结果中正确检测的目标数;Ngt为实验区实际包含的目标数;Nfa为虚警目标数。品质因数FoM反映了检测概率与虚警概率的平衡关系。在漏检目标数一定时,FoM值越大,表明检测效果越好。
由表1可知,本文算法的品质因数为1,而基于极化散射特征检测算法的品质因数为0.656,基于K分布的CFAR检测算法的品质因数为0.321,因此,本文算法相对于其他两种检测算法明显具有高精度的检测结果。
基于极化散射特征的检测算法,其正确检测的目标数为21个,能检测到全部舰船目标;但其虚警目标数有11个。产生虚警的主要原因:① 残留方位向模糊的第3散射机制功率λ3的强度与其周围弱小舰船相当,如图19所示,从而给检测结果造成一定的影响,产生虚警,如图23中的F1、F2;② 舰船目标与其相应方位向模糊噪声之间严重的拖尾现象,同样会产生虚警,如图23中的F3、F4和F5;③ 该算法的中间步骤仍采用了CFAR检测算法,故并没有克服单极化SAR传统CFAR检测算法的固有缺陷。
基于K分布的CFAR检测算法,其正确检测的目标数为17个,漏检有4个,虚警现象比较严重,有32个虚警,品质因数相对本文算法降低了约2/3,相对基于极化散射特征的检测算法降低了一半。该算法产生虚警的主要原因为:① 由于海面风场、船只运动状态等因素影响了海况的复杂程度,导致海杂波很难用一个统一的杂波统计模型来描述;② 舰船目标的方位向模糊噪声的对比度较强,很容易被误判为舰船目标,如图24中的F1、F2、F3、F4等。其产生漏检的主要原因可归纳为:① 海况的复杂程度、船只的朝向等因素直接决定了舰船目标与海杂波的目标杂波比大小,对于规格较小的弱小舰船目标,其对比度较小,很容易被漏检;②由于该算法采用的是滑窗检测策略,受窗口大小的限制,影像边缘的舰船目标,也很容易被漏检。另外,该算法检测过程中滑窗大小、目标窗口大小以及目标警戒保护区宽度的设定,都必须根据舰船目标大小的先验知识来确定;各窗口的大小直接决定了目标检测结果的精度。
5 结 论
本文围绕如何消除方位模糊噪声对海面舰船检测的影响这个问题,在分析了前人提出的基于极化散射特征的舰船目标检测方法的基础上,发现全极化相干矩阵T3的第3散射特征值在方位向模糊区较弱,可作为区别目标和方位向模糊噪声的有效工具,但仅仅可以明显地区分舰船目标与其本身的方位向模糊噪声,当附近存在目标杂波比较小的弱舰船目标时,方位向模糊噪声同样会影响其检测精度。因此,本文提出了一种基于全极化数据去方位向模糊噪声的舰船检测方法,并利用C波段的AIRSAR全极化数据进行了大量详细的算法验证。通过试验,不仅证实了H-A-Alpha分解获得的第3散射机制中的方位向模糊噪声较弱,而且发现了第3散射机制中的方位向模糊噪声相干性较差。通过子孔径相干,能够在很大程度上抑制方位向模糊噪声,同时提高舰船目标的目标杂波比,降低了虚警率,提高了舰船目标检测精度。
另外,为了进一步验证本文提出算法的可靠性和有效性,在4.2节还安排了算法对比试验,将本文算法与基于K分布的CFAR检测算法和文献[20]提出的基于极化散射特征的检测算法分别进行了定量化的对比分析。由试验结果可知,本文提出的算法明显具有高精度的检测结果,并具有相对显著的优势:① 不涉及海杂波统计模型的建立,从而克服了CFAR检测算法固有的缺陷;② 在一定程度上不受海况复杂程度的影响,在抑制方位向模糊噪声的同时,能检测到对比度较小的弱小舰船目标,从而避免了虚警和漏检现象。
[1] SCIOTTI M,LOMBARDO P.Ship Detection in SAR Images:A Segmentation-based Approach[C]∥Proceedings of the 2001 IEEE Radar Conference.Atlanta:IEEE,2001:81-86.
[2] LOMBARDO P,SCIOTTI M.Segmentation-based Technique for Ship Detection in SAR Images[C]∥IEEE Proceedings:Radar,Sonar & Navigation.Hertfordshire:IET,2001,148(3):147-159.
[3] AI Jiaqiu,QI Xiangyang,YU Weidong,et al.A New CFAR Ship Detection Algorithm Based on 2-D Joint Log-normal Distribution in SAR Images[J].IEEE Geoscience and Remote Sensing Letters,2010,7(4):806-810.
[4] YEREMY M,CAMPBELL J W M,MATTAR K,et al.Ocean Surveillance with Polarimetric SAR[J].Canadian Journal of Remote Sensing,2001,27(4):328-344.
[5] SCIOTTI M,PASTINA D,LOMBARDO P.Polarimetric Detectors of Extended Targets for Ship Detection in SAR Images[C]∥Proceedings of IEEE 2001International Geoscience and Remote Sensing Symposium.Sydney:IEEE,2001:3132-3134.
[6] SCIOTTI M,PASTINA D,LOMBARDO P.Exploiting the Polarimetric Information for the Detection of Ship Targets in Non-homogeneous SAR Images[C]∥Proceedings of IEEE 2002International Geoscience and Remote Sensing Symposium.Rome:IEEE,2002,3:1911-1913.
[7] ARNAUD A.Ship Detection by SAR Interferometry[C]∥Proceedings of IEEE International Geoscience and Remote Sensing Symposium.Hamburg:IEEE,1999:2616-2618.
[8] MASATO I,KAZUO O,ISAO T,et al.Detection of Ships Using Cross-correlation of Split-look SAR Images[C]∥Proceedings of IEEE 2001International Geoscience and Remote Sensing Symposium.Sydney:IEEE,2001:1807-1809.
[9] LI Haiyan.Ship Detection with Polarimetric SAR Data[D].Beijing:Institute of Oceanology,Chinese Academy of Sciences,2007.(李海燕.极化SAR图像海面船只监测方法研究[D].北京:中国科学院海洋研究所,2007.)
[10] FERRO-FAMIL L,REIGBER A,POTTIER E,et al.Scene Characterization Using Subaperture Polarimetric SAR Data[J].IEEE Transactions on Geoscience and Remote Sensing,2003,41(10):2264-2276.
[11] FERRO-FAMIL L,REIGBER A,POTTIER E.Nonstationary Natural Media Analysis from Polarimetric SAR Data Using a Two-dimensional Time-frequency Decomposition Approach[J].Canadian Journal of Remote Sensing,2005,31(1):21-29.
[12] PI Yiming,YANG Jianyu,FU Yusheng,et al.Synthetic Aperture Radar Imaging Principle[M].Chengdu:University of Electronic Science and Technology of China Press,2007.(皮亦鸣,杨建宇,付毓生,等.合成孔径雷达成像原理[M].成都:电子科技大学出版社,2007.)
[13] ZHANG Yongjun,LI Caiping.Analysis of Synthetic Aperture Radar Ambiguities[J].Journal of Electronics &Information Technology,2004,26(9):1455-1460.(张永军,李彩萍.合成孔径雷达模糊度分析[J].电子与信息学报,2004,26(9):1455-1460.)
[14] MOREIRA A.Suppressing the Azimuth Ambiguities in Synthetic Aperture Radar Images[J].IEEE Transactions on Geoscience and Remote Sensing,1993,31(4):885-895.
[15] ZHANG Lu,GUO Huadong,HAN Chunming,et al.Moving Targets Detection in SAR Images Based on Sub-aperture Decomposition[J].Acta Electronica Sinica,2008,36(6):1210-1213.(张露,郭华东,韩春明,等.基于子孔径分解的SAR动 目 标 检 测 方 法 [J].电 子 学 报,2008,36(6):1210-1213.)
[16] HAN Chuanzhou.Synthetic Aperture Radar:Systems and Signal Processing[M].Beijing:Publishing House of Electronics Industry,2006.(韩传钊.合成孔径雷达-系统与信号处理[M].北京:电子工业出版社,2006.)
[17] CHEN L.Effects of Target Motion on Polarimetric SAR Images[J].Canadian Journal of Remote Sensing,2006,32(2):51-64.
[18] CHEN L.Time-frequency Analysis of PolSAR Moving Target Data[J].Canadian Journal of Remote Sensing,2007,33(4):237-249.
[19] CHEN L,CHRISTOPH H,GIERULL.A New Application for PolSAR Imagery in the Field of Moving Target Indication/Ship Detection [J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(11):3426-3436.
[20] WANG Changcheng.Method for Ship Detection from SAR Images[D].Wuhan:Wuhan University,2008.(汪长城.SAR图像海上舰船目标检测方法研究[D].武汉:武汉大学,2008.)
[21] JIANG Guoan,SONG Hongjun.Analysis and Suppression on Azimuth Ambiguity of SAR[J].Electronic Measurement Technology,2007,30(12):45-47.(姜 国 安,宋 红 军.SAR方位模糊分析与抑制[J].电子测量技术,2007,30(12):45-47.)
[22] RINGROSE R,HARRIS N.Ship Detection Using Polarimetric SAR Data[C]∥ Proceedings of SAR Workshop:CEOS Committee on Earth Observation Satellites Toulouse.Toulouse:[s.n.],1999,450:687-691.
[23] CLOUDE S R,POTTIER E.A Review of Target Decomposition Theorems in Radar Polarimetry[J].IEEE Transactions on Geoscience and Remote Sensing,1996,34(2):498-518.
[24] ERIC P,SHANE R C.Application of the H/A/Alpha Polarimetric Decomposition Theorem for Land Classification[C]∥ Wideband Interferometric Sensing and Imaging Polarimetry.San Diego:SPIE,1997,3120:132-143.
[25] TOUZI R,BOERNER W M,LEE J S,et al.A Review of Polarimetry in the Context of Synthetic Aperture Radar:Concepts and Information Extraction[J].Canadian Journal of Remote Sensing,2004,30(3):380-407.
[26] WANG Chao,ZHANG Hong,CHEN Xi,et al.Full Polarimetric SAR Image Processing[M].Beijing:Science Press,2008.(王超,张红,陈曦,等.全极化合成孔径雷达图像处理[M].北京:科学出版社,2008.)
[27] LEE J S,POTTIER E.Polarimetric Radar Imaging from Basics to Applications[M].Boca Raton:CRC Press,2009.
[28] ZHANG Jixian,WEI Jujie,ZHAO Zhen,et al.Color Orthophoto Map Generation Based on Multi-direction and Multi-polarization SAR Data Fusion[J].Acta Geodaetica et Cartographica Sinica,2011,40(3):276-282.(张继贤,魏钜杰,赵争,等.基于多方向多源合成孔径雷达数据融合的假彩色正射影像制作[J].测绘学报,2011,40(3):276-282.)
[29] WU Wanlan.Research on Polarimetric SAR Images Classification Based on Sub-aperture[D].Chengdu:University of Electronic Science and Technology of China,2009.(吴婉澜.基于子孔径的极化SAR图像目标分类算法研究[D].成都:电子科技大学,2009.)