基于结构光的3D激光扫描仪系统研究*
2013-07-25万韬阮
林 静,汤 汶,2,万韬阮,3
(1.西安工程大学电子信息学院,西安710048;2.英国提塞德大学计算机学院,英国TS1 3BA;3.英国布拉德福德大学信息学院,英国BD7 1DP)
1 引言
在三维重建过程中,要想得到高精度的三维模型,需要获得目标物体几万个,甚至几百万个以上的高精度三维坐标点。而基于单点精度测量的传统测绘技术在数据数量上很难满足这个要求。三维激光扫描技术可以很好地解决这一难题。它是一种能够直接获取被测物体深度信息的高新技术,能够全自动高精度地直接对目标物体进行激光扫描,然后将各种复杂的目标实物的三维数据完整地采集到电脑中,从而快速地重建出三维物体模型。
由于三维激光扫描仪能够快速获取目标景物的深度信息,简单快捷,同时能够有效地恢复出真实准确的三维模型,因此,基于激光扫描技术的三维重建研究成为近年来的研究热点[1-2]。目前,已有多种三维激光扫描仪产品被开发出来投放到市场,比如,Polhcmus公司研制的Fastscan扫描仪,MENSI公司出品的S25系列三维激光扫描仪等等。基于不同的原理所研制出来的扫描仪,有不同的适用范围和技术特点,比如有的适合长距离的室外使用,有的适合短距离的室内使用等。但这些三维激光扫描仪却有一个共同的缺点即价格昂贵,不利于大范围的推广。
2 方法
2.1 原理
文中所研究的激光扫描系统主要是基于结构光法,将一字状激光投射到待扫描的物体上形成光条纹,再由相机获取物体上的光条纹,并对条纹中心进行提取,然后由相机与光源的相对位置,通过三角法和计算机视觉理论[3],计算出被照射点的三维坐标。激光三角测距原理图如图1所示。在图中,L表示物体和激光器之间的距离;d表示激光器中心和摄像头中心距离;f表示摄像头的焦距;β表示激光器的夹角;x表示待测物体上激光光点在摄像头感光元件上的成像到一侧边缘的距离。要求得L,可由如下公式求得:

图1 激光三角测距原理图


其中,β,d,f,在测距设备安装后就固定不变,数值为已知。x可以通过在摄像头画面中查找并计算激光点中心位置的像素坐标来求得。这样即可求得被扫描物体和激光器之间的距离L。以上介绍的是基于单点的三角测距原理,3D激光扫描原理采用类似的方式进行扩充。
2.2 系统流程
该系统由一个标定板、一台PC电脑和一个网络摄像头及一个一字线状激光器组成。首先对标定背景进行设置,然后对相机进行标定,最后让激光线划过被扫描物体进行数据采集。
3 系统具体实现
3.1 设置标定背景
在相机标定之前,由传统的标定方法可知采用三维标定系统的直接线性法[4]及Tsai的两步法[5],要求标定板是立体的,即两块标定板必须正交。如图2所示,Simon Winkelbach和Sven Molenstruck研制出的DAVID三维激光扫描仪系统所采用的手工制作标定板如图3所示,介于实际手工制作的繁琐及很难保证完全的正交,而利用实验桌角的正交性,直接将贴有标志点的纸张贴到桌角,如图4所示。

图2 正交的标定背景

图3 正交的标定背景

图4 正交的标定背景
3.2 相机标定
设置好标定板后,对相机进行标定。相机标定的目的是求得相机的内外参数。因为空间物体表面上的一点P(x,y,z)与物体相应图像上的一点p(u,v)是由相机模型决定的,而这些模型参数称为相机参数。它们的转换关系为:

其中P为内外参数求得的标定矩阵。标定过程中,采用DAVID系统提供的免费软件,标定过程如图5所示。
图5 相机标定
3.3 数据采集
将被扫描物体放在桌角前面的空位置上,同时摄像头的位置保持不动,手持线激光发射器对被扫描物体进行上下扫描,摄像头对此过程进行拍摄,同时,与摄像头相连的pc机上的软件系统同步处理摄像头所采集的每一帧图像,如图6所示。通过上面的处理,可以得到被扫描物体的一个曲面点云,如图7所示。


4 实验结果及分析
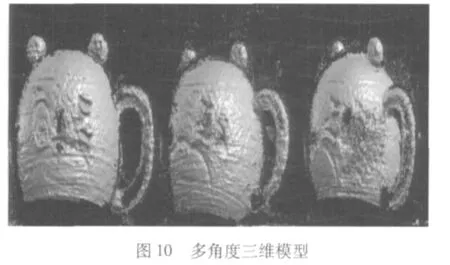
将被扫描物旋转一个角度,重复上面的步骤,可得到被扫描物体另外一个角度上的曲面点云。通过多次旋转,如图8所示,多次重复上面的扫描过程,可获得被扫描物体不同方向上的曲面点云,如图9所示,所得的各个角度的三维模型如图10所示。

图8 多角度原图
在激光扫描过程中,扫描质量的好坏和激光光源及测量环境有很重要的关系,比如反射率较低的待测物体表面,会直接导致光条很暗等。

5 结束语
该研究从传统的激光扫描仪价格昂贵难以普及这一缺点出发,借鉴了DAVID三维激光扫描仪系统的相关方法,基于激光3D扫描仪的相关原理,利用常见的摄像头及线状激光器和pc机搭建了一个低成本的激光扫描系统。虽然本系统只适合短距离小件物体的扫描,但已使得激光扫描系统更加的平民化,也使大家能够进行自制三维模型的体验。
为了获得更精确完整的三维模型,需要采用相关的点云匹配算法,将这些曲面点云匹配成一个完整的三维模型点云,这也是下一步的工作重点。
[1] 王晓南,郑顺义.基于激光扫描和高分辨率影像的文物三维重建[J].测绘工程,2009,18(6):53-57.
[2] 王茹.古建筑数字化及三维建模关键技术研究[D].西安:西北大学,2010,06.
[3] M POTMESIL.Generating Models of Solid Objects by Matching 3D Surface Segments:Proceedings 8th International JointConference ArtificialIntelligence[C].Karlsruhe,1983:1089-1093.
[4] J WENG,P COHEN,M HCRNIOU.Calibration of Stereo Cameras Using a Non-linearDistortion Model[J].Proceedings International Conference on Pattern Recognition,1990:246-253.
[5] TSAI R.A versatile camera calibration technique for high-accuracy 3D Machinevision metrology using offshelf TV cameras and lenses[J].IEEE Journal of Robotics and Automation.1987,3(4):323-344.
