北斗卫星导航系统电离层模型应用评价
2013-07-25申俊飞郭海荣
申俊飞,郑 冲,郭海荣,唐 斌
(北京卫星导航中心,北京 100094)
1 引言
电离层延迟是影响卫星导航定位的最主要因素,尤其对于单频接收机用户,电离层延迟是一个严重影响定位精度的误差源。美国全球卫星定位系统 (global positioning system,GPS)作为全球卫星导航定位系统之一,市场应用占有率最为广泛,GPS每天 (有时长达3-7d)发播一组日固地磁坐标系[1-2]下的 Klobuchar 8 (简称 GPS K8)参数电离层模型供单频用户使用,对电离层的改正精度在60%左右[3-7],其优点是可以较好地反映电离层的分布受地球磁场的影响,缺点是日固地磁系在描述电离层周日尺度上的变化参数时会产生扭曲。
我国北斗卫星导航系统 (BeiDou navigation satellite system,BDS)每2h更新发播一组日固地理坐标系下Klobuchar模型的8参数电离层模型(简称BDS K8)提供给用户使用[8],其形式与GPS K8较相似[2,9-11]。其优点是地理经度与时间的统一性较好,电离层周日变化也与之吻合,适宜于电离层周日尺度上的模型参数化 (振幅、周期等)。
欧洲定轨中心 (center for orbit determination in Europe,CODE)采用分布在全球150多个GPS站点的观测数据后处理得到15阶球谐系数,进而可以得到2h一组的全球电离层图 (global ionospheric map,GIM),给出了纬度范围-87.5°-87.5°,间隔2.5°;经度范围-180°-180°,间隔5°格网点上的天顶方向上的总电子含量 (vertical total electron content,VTEC)。可见GIM是基于GPS观测值建立的电离层模型,是一种特殊的经验模型,是依据某一时段中在某一个区域内实际测定的电离层延迟采用数学方法拟合出来的一个模型,根据GIM可以插值得到介于上述经纬度范围内任意点的VTEC。因此可以作为电离层研究的依据。
本文首先对BDS K8模型、GPS K8模型和GIM模型进行了介绍,然后以GIM为基准从地域和时间上对BDS K8模型的电离层改正效果进行了分析;另外分别利用BDS K8和GPS K8两种电离层改正模型,计算统计和分析中纬度北京地区BDS单频接收机的定位精度,最后对BDS K8电离层模型应用给出结论。
2 BDS K8模型改正效果分析
首先,基于北斗接收机采集的BDS K8电离层模型参数,计算各历元所有可见卫星视线方向上的电离层延迟大小;其次,基于CODE提供的GIM模型,计算各卫星视线方向上的电离层延迟,以此作为BDS K8模型计算值的比对基准;最后,计算BDS K8模型相对于GIM模型的改正率。
地理位置和时间是影响电离层模型精度的两个主要原因,为考察不同地理位置BDS K8模型的改正效果,选取0°N、15°N、30°N、45°N 和60°N,90°E、105°E、114°E和125°E,数据采集时间为2012年6月至7月,对BDS K8模型相对于GIM的改正残差进行计算统计。改正残差均方根(root mean square,RMS)值随经度和纬度的变化关系如表1所示。
为考察时间对BDS K8模型改正精度影响,在60°E-160°E,60°N-60°S范围内,形成经差和纬差为2°×2°的设计格网,选取协调世界时 (UTC)时间2012年7月22日07时 (对应北京时间15时)和19时 (北京时间03时)两个时段,计算BDS K8模型相对GIM模型的改正残差RMS值,结果如图1所示。
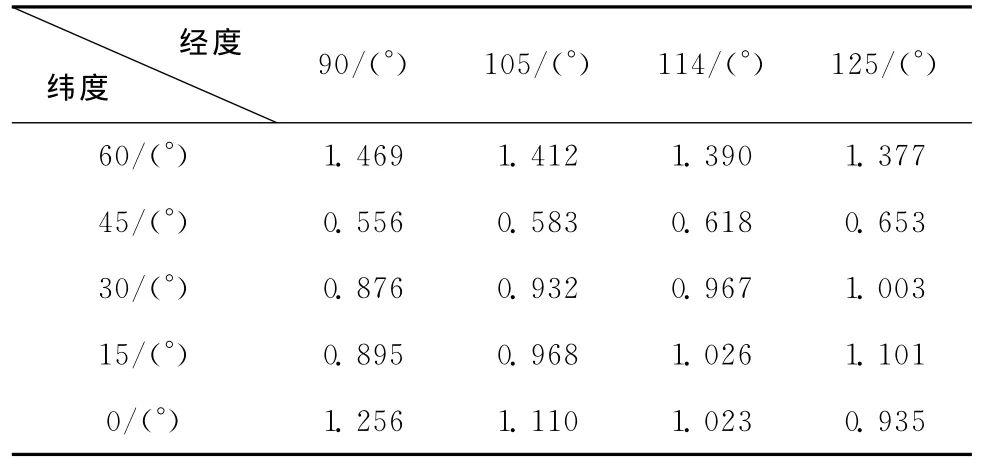
表1 BDS K8模型改正残差RMS统计结果/m
由表中可以看出: (1)中纬度地区的模型精度比低纬和高纬度地区高,其改正残差RMS均值在0.6m左右;(2)在中纬度地区,90°E-125°E,精度呈降低的趋势,整体而言最大RMS均值在1.5m以内。
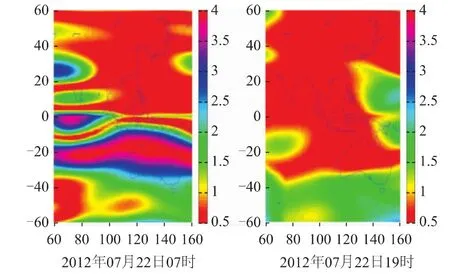
图1 两个时刻的改正残差RMS值在亚太地区的分布情况
从图1可以看出,BDS K8模型的改正精度基本在1m以内。在白天时段,电离层比较活跃,在南半球的改正精度会出现一个峰值区域,最大值超过4m;在夜间时段,电离层不太活跃,南半球改正精度在2m以内。出现这种现象的主要原因为:(1)目前BDS的电离层参数是基于北半球的数据计算出来的,在南半球采用对称于北半球的模式;(2)夜间电离层不活跃,所以南半球的改正精度也有所提高。
3 BDS K8与GPS K8对定位影响分析
对北京地区 (中纬度地区)4天 (2012年7月20日、21日、22日、23日)的接收机单频B1频点 (1 561.098MHz)静态定位实测数据进行统计分析,评估BDS K8和GPS K8的电离层模型对单频用户的改正精度。
设置北斗接收机高度截止角为5°,每秒输出一个定位结果 (每天24h约为86 400个定位结果),分别使用BDS K8和GPS K8对单频接收机的单频观测值进行修正,并计算出用户机每个历元的定位结果,与基准坐标进行比对,把每个历元的水平、高程和三维定位精度按从小到大排列,取95%处的数值作为每天的定位精度。对每天的无电离层模型和用BDS K8和GPS K8电离层模型修正的单频定位精度进行统计,统计结果见表2,在上述三种情况下每天的单频定位三维精度变化分别见图2、图3、图4和图5。

表2 基于不同电离层改正模型单频定位结果统计 (95%)/m

图2 7月20日单频定位三维精度变化

图3 7月21日单频定位三维精度变化

图4 7月22日单频定位三维精度变化
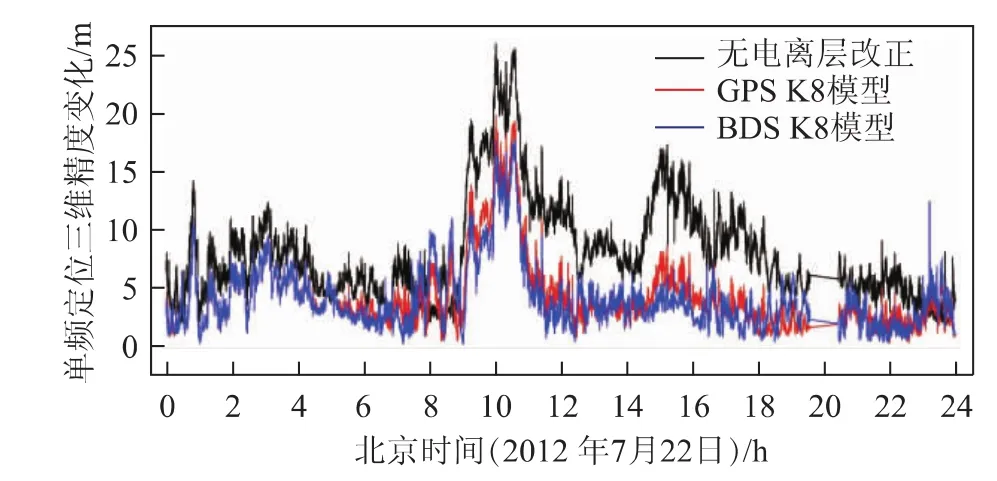
图5 7月23日单频定位三维精度变化
从表2统计结果和图2至图5单频定位三维精度变化可以看出:
(1)BDS与GPS系统发播的电离层模型对单频用户高程和三维定位结果较不加电离层时修正效果有极大改进,水平方向定位精度略有改善,说明电离层延迟是影响单频用户定位精度的主要误差源,而且对用户定位精度的影响主要在高程方向。
(2)BDS发播的电离层模型与GPS电离层模型定位结果变化一致,但在单频用户定位精度方面,BDS K8模型略优于GPS K8参数模型改正效果,相对于GPS K8电离层模型的更新速度来说,BDS K8每两小时更新一组模型参数,在效率上还有待进一步提高。
4 结论
本文首先以CODE提供的GIM模型为基准,对BDS K8的电离层改正效果从地域和时间上进行了计算分析,表明BDS K8在中纬度地区的电离层修正效果最好。与GPS K8的定位精度比较结果可以看出,BDS K8电离层改正效果稳定,略优于GPS K8,但以更新速率和资源占用上来看,BDS K8的模型参数精度还有待进一步提高。总体上,BDS K8电离层模型可以满足广大用户单频定位服务的需求。
[1]章红平.基于地基GPS的中国区域电离层监测与延迟改正研究[D].上海:中科院上海天文台,2006.
[2]ZHOU Shan-shi,HU Xiao-gong,WU Bin,etal,Orbit Determination and Time Synchronization for a GEO/IGSO Satellite Navigation Constellation with Regional Tracking Network[J].Scinece China Physics, Mechanics & Astronomy,2011,54 (6):1089-1097.
[3]KLOBUCHAR J.Ionospheric Time-delay Algorithm for Single-frequency GPS Users[J].IEEE Transactions on Aerospace and Electronic Systems,1987,AES-23(3):325-331.
[4]王军.GNSS区域电离层TEC监测及应用[D].北京:中国测绘科学研究院,2008.
[5]施昆,张能武,字成波.GPS电离层改正模型的评价[J].昆明理工大学学报:理工版,2004,29(4):73-78.
[6]李东,王静,宋淑丽,等.基于区域电离层建模的硬件延迟参数估计[J].测绘工程,2011,20(6):44-44.
[7]李秀海,郭达志,张随甲.电离层TEC的预测模型[J].测绘工程,2010,19(1):5-8.
[8]吴晓莉,戴春丽,刘利,等.地理与地磁坐标系下的K氏电离层延迟模型分析比较[J/OL].[2013-02-16].http://wenku.baidu.com/view/d537cb23a5e9856a56 126008.html.
[9]余明,郭际明,过静珺.GPS电离层延迟Klobuchar模型与双频数据解算值的比较与分析[J],测绘通报,2004(6):5-8.
[10]罗力.电离层对GPS测量影响的理论与实践研究[D].南昌:江西理工大学,2009.
[11]王虎.GPS精密单点定位中电离层延迟改正模型的研究与分析[D].长沙:中南大学,2008.
