长航时长距离机载GNSS动态定位中参考卫星与参考测站的自适应更换方法
2013-07-25王潜心
王潜心
(1.中国测绘科学研究院,北京 100830;2.地理信息工程国家重点实验室,西安 710054)
1 引言
GNSS定位可分为绝对定位和相对定位两种模式。绝对定位由于不依赖参考站的信息,可方便快捷的获取测站的三维坐标信息,因此得到了广泛的应用。但在机载GNSS定位中,由于载体运动速度较快、机动性较大、信号易受机身震动机翼反射等众多因素的影响,导致绝对定位的精度和可靠性难以保证。相对定位模式则具有稳定性高、可靠性强、定位精度高等优点,因此被高精度机载GNSS定位所广泛的采用[1-3]。而根据使用参考站个数的多少,动态相对定位又可分为多参考站解算模式 (网解)和单参考站解算模式 (单基线解)两种。网解由于充分利用了流动站周围多个参考站的观测数据,因此具有较高的精度和可靠性。相对与单基线模式而言,当个别参考站出现异常时,网解的稳定性受影响程度会大大降低。它的缺点是数据处理量大、基线相关性强、定权方法较为复杂等。尤其是在长航时、长距离机载GNSS动态定位中,由于数据的采样率高、观测时间长,网解将涉及到海量观测数据的预处理、众多模糊度的固定以及抗差估计的迭代计算等,其数据处理量会非常之大。单基线处理模式则具有解算未知参数少、定权方法简单、无基线相关性以及数据处理量小等优点。但通常情况下,单基线处理模式很难满足长距离精密动态定位的要求。究其原因主要是:①许多公共误差随流动站与参考站间距离的增加,很难通过差分的方式进行有效消除;②共视卫星数随着站间距离的增加而逐渐减少,导致定位精度下降甚至无解;③模糊度的解算成功率也因基线距离的增加而下降[4]。而更换较近的参考站为新参考站无疑是解决这些问题最直接有效的办法。对于长航时而言,则势必会遇到参考卫星的更换问题。因此寻求一种更加合理有效的换星换站方法,使其能实现换星换站前后数据的无缝拼接,保证整个定位过程的连续性、可靠性和稳定性至关重要。
2 参考卫星更换方法
针对长航时长距离机载GNSS动态相对定位中的换星问题,本文给出了一种简单易行的方法,基本思想是:当原参考卫星消失或其观测数据出现周跳需更换新参考卫星时,只需利用换星前的双差模糊度乘以一个转换矩阵,即可得到换星后的双差模糊度。
假设换星前的原双差模糊度可表示为

其中▽ΔN为原双差模糊度,N0为非差模糊度,A为原双差算子。并假设换星后的新双差模糊度可表示为


其中C为新旧双差模糊度间的转换矩阵,由此可见如何获取转换矩阵C是其关键问题。
首先将式 (1)及式 (2)分别代入式 (3)并约去N0得

然后对式 (4)两边同时右乘AT(AAT)-1得

由式 (5)可知,更换参考卫星时新双差模糊度可利用原双差模糊度乘以一个转换矩阵得到,而该转换矩阵可由新旧双差算子通过式 (5)计算得到。该方法不仅简单易行,而且利于计算机编程实现。
3 参考测站更换方法
针对长航时长距离机载GNSS动态相对定位中的换站问题,本文给出一种自适应换站方法。其主要思想是:处理长距离机载动态定位数据时,始终保持单基线的动态定位模式,当发现流动站与原参考站间的距离大于流动站与其他参考站的距离时,自动更换周围最近的参考站为新参考站;对换站前后的数据设置一定时间的重叠段,利用参数的等价约化法[5]对换站前后的数据进行严格的自适应融合,以保证整个解算过程的连续性。其基本原理如下:假设飞机i2从机场a飞往机场g,ag间的距离为r。机场a设有参考站i1,机场g设有参考站i4,ag间有参考站i3,如图1:

图1 自适应换站法的示意图
最大限定距离和重叠段的设置主要基于:当流动站与参考站间的距离达到一定限度后,许多与距离相关的公共误差将很难通过差分的方式进行有效的消除,此时流动站的解算精度也会随之下降,因此需要更换较近的参考站作为新参考站。最大限定距离的设置由软件自主分析并确定,软件根据用户输入的参考站坐标和伪距单点定位得到的流动站坐标,自动比较每个历元流动站与所有参考站的距离。当发现流动站与其他参考站间的距离小于流动站与原参考站间的距离时,记录下该历元,并将该历元流动站与原参考站的距离设定为一个最大限定距离。更换新参考站后将会产生新的双差模糊度,为保持解的稳定性和连续性,此时应继续保持对原参考站的跟踪直至新的双差模糊度解算成功。对新双差模糊度解算成功的辨别标准可采用方差比检验法。即当候选模糊度中最优模糊度与次优模糊度解算结果的方差比Ratio值大于用户给定值时,确认新双差模糊度解算成功。从换站开始到新双差模糊度解算成功,这段时间既有原参考站的观测数据又有新参考站的观测数据,因此称之为重叠段。自适应换站法的具体解算方法如下:假设使用参考站i1时的双差观测方程为

使用参考站i3时的双差观测方程为

使用参考站i4时的双差观测方程为

其中L,L′,L″表示双差观测值,A,B,C为系数矩阵,X1为ab段的位置参数,X2为bc段的位置参数,X3为ce段的位置参数,X4为ef段的位置参数,X5为fg 段的位置参数,▽ΔNi1,i2、▽ΔNi3,i2和▽ΔNi4,i2为参考站i1、i3、i4与流动站i2间的双差模糊度,V、V′及V″为残差;P、P′及P″为权阵。
首先将式 (6)写成分块矩阵的形式

其中包含参数X1和 ▽ ΔNi1,i2。
式 (9)对应的法方程为

其中

对式 (10)进行等价约化可得

令D1= (E-J)A1,则有

式 (14)为只含重叠段bc的流动站位置参数的法方程,相应的等价观测方程为

根据式 (7),使用参考站i3时的法方程可写为

其中M′=BTP′B,U′=BTP′L′。由 于 式(14)及式 (16)中含有相同的流动站位置参数X2,因此可将两个法方程的对应元素进行叠加得

根据式 (17),利用上述方法同理可得到只含重叠段ef位置参数X4的法方程

D2表达式的推导过程同前。
根据式 (8),使用参考站i4时的法方程可写为

其中M″=CTP″C,U′=CTP″L″。由于式(18)及式 (19)式中含有相同的位置参数X4,因此可将两法方程的对应元素进行叠加得
根据式 (20),利用可变参数的序贯平差[6]即可得到流动站的位置参数X4、X5以及双差模糊度▽ΔNi4,i2。最后进行回代,分别解算出使用参考站i3和i1时的位置参数和双差模糊度。为抵御粗差的影响,我们采用了IGG3方案[7]进行抗差估计。
该方法的主要特点是:①不用重新初始化模糊度,避免了换站前后解的不连续;②无需求解新旧参考站间的静态基线;③该方法利用的是法方程的融合,即原始观测信息的融合,比基于解的融合要更加严格[8]。另外该方法只需在现有单基线动态定位软件的基础上增加一个子程序,即可实现长距离动态定位的功能,不会破坏原有程序的整体结构。
4 实验及分析
为检验上述方法的实际效果,利用德国地区某航空重力测量项目的一组实测机载GNSS数据进行了实验。飞机的平面轨迹如图2所示,测区内共有7个IGS站。飞行的起点和终点分别为A、B,航行距离约1 000km。起飞和降落时刻分别为13点10分24秒和17点58分4秒,采样率为1s,共17 261个历元。
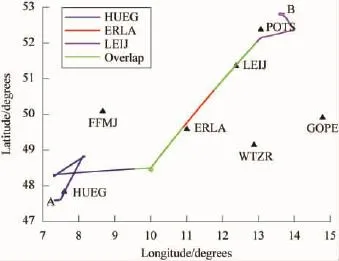
图2 飞行的平面轨迹图

图3 网解结果在NEU三个方向的重复性标准差
首先采用测区内的7个IGS站作为参考站,对流动站的位置进行网解,并将网解的结果作为“真值”。图3显示了网解的结果在NEU三个方向上的重复性标准差。由图4可知,该算例中网解的重复性标准差约为1cm。另外由于飞机的头部和尾部分别架设了一台GPS接收机,两台接收机在地面量测的距离为5.343m。因此可以通过分别求解两台GPS接收机在整个飞行过程中的位置,并计算出它们每个历元的空间几何距离,然后与地面量测的精确距离进行比较来检验解的稳定性,结果如图4。由图可知,网解得到的平均值与地面的量测值相差约2mm,标准方差为9mm。曲线两端的波动相对较大是由于飞机在起飞和降落时机身震动较大,观测噪声相对较大所致。

图4 网解得的两台GPS接收机的空间几何距离
为对本文所提方法和现有方法进行比较,设计了如下三个实验方案:①始终采用HUEG作为参考站,检验流动站与参考站距离越来越远时的定位情况;②依次选用HUEG、ERLA、LEIJ为参考站,换站时模糊度被重新初始化;③同样依次选用HUEG、ERLA、LEIJ为参考站,但换站时采用本文所提的 “自适应换站”法进行解算。其中最大限定距离由软件自动分析并确定,分别为162.72km和134.43km,相应的换站时刻为第7 936历元和第12 655历元,如图5所示。算例中的Ratio值取5,两次换站后重叠段历元个数分别确定为2 919个历元和2 387个历元。实验使用的参考站情况和起止历元如表1。参考卫星的更换情况如图6所示。由图可知算例共观测到共视卫星14颗,其中PRN16、PRN3先后被选作参考卫星:第1—第15 951历元选用PRN16号卫星作为参考卫星,第15 952~17 261选用PRN3号卫星作为参考卫星。
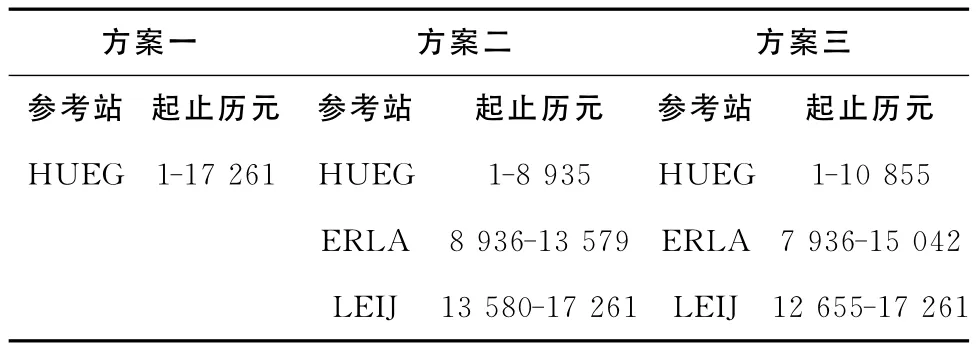
表1 实验选用的参考站及数据的起止历元

图5 飞机与三个参考站间距离的变化情况
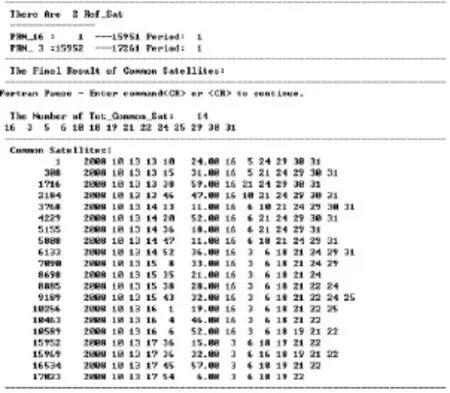
图6 共视卫星变化及参考卫星的更换情况
数据处理软件采用自主开发的HALO_GPS精密动态定位软件[9]。解算模式为序贯平差,卫星截止高度10°,星历采用IGS精密星历,观测值使用消电离组合观测值,IGG3方案中k0=1,k1=5。由于机载GPS动态相对定位中流动站与参考站间高差相当大,一般达到了几千米。而对流层延迟随测站高程的变化又非常快,因此机载动态相对定位中的对流层延迟影响很难通过差分的方法将其消除。对此我们对双差后剩余的对流层残差采用了附加参数估计,以抵御其影响。表2为各实验与 “真值”比较,在东西、南北和高程方向上定位精度的统计结果。图7、图8及图9为各实验与 “真值”比较,在三个方向上的差值及相应的双差观测值个数的变化情况。

图7 方案1与 “真值”在三个方向上差值及双差观测值个数的变化
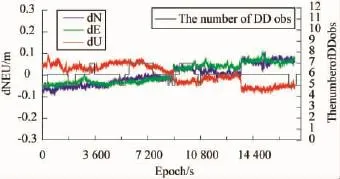
图8 方案2与 “真值”在三个方向上差值及双差观测值个数的变化

图9 方案3与 “真值”在三个方向上差值及双差观测值个数的变化
从表2和图7、图8及图9可知:方案一始终采用HUEG作为参考站,随着流动站与参考站间距离增加,共视卫星数逐渐的减少,定位精度也随之下降;而方案二和方案三及时更换了较近的参考站为新参考站,因此有效的避免了这一缺陷;但方案二在更换参考站时,模糊度被重新初始化,因此导致了换站前后解的不连续;方案三采用本文所提的 “自适应换站”法,不仅避免了因飞行距离过远而导致定位精度下降,也克服了因换站引起的前后解的不连续。自适应换站法的解算策略实质上是一种序贯平差,即每个时段的未知参数虽被分别解算,但其实都利用了所有观测历元的信息,因此方案三中每个时段的解算结果精度都优于方案一和方案二。

表2 各方案动态定位精度的统计结果 (cm)
5 结束语
本文针对长航时长距离机载GNSS动态相对定位中的参考卫星和参考测站的更换问题进行了探讨,提出了一种自适应的换星换站方法。其基本思想是:利用换星前后新旧双差模糊度的函数关系推导出了一个通用的转换矩阵C,利用转换矩阵C乘以原双差模糊度即可得到新双差模糊度;而对于换站问题,则是利用等价消参法将原双差观测方程的信息完整的保存下来,然后通过法方程的叠加将其传递到新双差观测方程中,进而实现换站前后数据的无缝拼接。最后通过真实飞行数据的解算,证明了该方法的有效性和可行性。并且计算结果表明:该方法的水平方向定位精度约为1cm,高程方向约为2cm,可满足高精度长航时、长距离机载GNSS动态定位的需求。
[1]CHEN G.GPS Kinematic Positioning for the Airborne Laser Altimetry at Long Valley California[D].Cambridge:Massachusetts Institute of Technology,1998.
[2]XU G,SCHWINTZER P,REIGHER C.KSGSoft(Kinematic Static GPS Software)-Software User Manual[R]//Scientific Technical Report 19/1998.Potsdam:Deutsches GeoForschungsZentrum,1998.
[3]胡丛玮.GPS短基线模型与动态定位[J].测绘学报,2000,29(3):282-285.
[4]HU G,OVSTEDAL O,FEATHERSTONE W E,etal.Using the Virtual Reference Stations Concept for Long-range Airborne GPS Kinematic Positioning [J],Survey Review,2008,40(307):83-91.
[5]周江文.论介数[C]//周江文.拟稳平差论文集.北京:测绘出版社,1987:1-5.
[6]黄维彬.近代平差理论及其应用[M].北京:解放军出版社,1992.
[7]YANG Y.Robust Estimation for Dependent Observations[J].Manuscripta Geodaetica,1994,19(1):10-17.
[8]杨元喜,曾安敏.大地测量数据融合模式及其分析[J].武汉大学学报:信息科学版,2008,33(8):771-774.
[9]WANG Q,XU T,XU G.HALO_GPS (High Altitude and Long Range Airborne GPS Positioning Software)-Software User Manual[R]//Scientific Technical Report.Potsdam:Deutsches GeoForschungsZentrum,2010.
