列车横向半主动悬挂模糊控制策略研究
2013-07-20李广军金炜东赵景波
李广军,金炜东,赵景波
1.西南交通大学电气学院,成都 610031
2.江苏技术师范学院,江苏常州 213001
列车横向半主动悬挂模糊控制策略研究
李广军1,金炜东1,赵景波2
1.西南交通大学电气学院,成都 610031
2.江苏技术师范学院,江苏常州 213001
在列车高速运行的同时,需要提高列车平稳性,来减少横向振动。为了降低成本,尽量用较少的投入获得较好的减振效果,而对车体采用主动或者半主动悬挂控制策略,是改善机车车辆运行平稳性品质的一条有效途径[1-5]。与主动控制技术相比,半主动控制技术不需要外界动力源,半主动悬挂减振器以可控阻尼器代替被动减振器,通过控制系统使可控阻尼器产生连续可调的阻尼力,从而达到改善机车车辆动力学特性的目的。因此,列车多采用横向半主动悬挂来减少列车横向振动。列车悬挂系统是含有多种不确定因素的非线性动力系统,存在非线性、时变等因素,很多控制算法都有其局限性。例如,采用常规PID控制[6]参数整定困难,在控制中往往与其他控制方法结合起来使用;采用线性最优控制方法在悬挂系统建模时,忽略了高阶动态环节,所得到的控制参数是根据确定的简化系统参数计算出来的,仅对理想的数学模型保证预期的性能,当系统参数变化到一定程度时,会使系统变得不稳定,控制参不再使性能指标最优,甚至会使悬架性能恶化,所以最优控制方法在实际半主动悬架控制系统中应用很少[7-8];由于鲁棒控制在设计中强调不确定性对悬挂系统的影响,需要在稳定鲁棒性和性能鲁棒性之间作折中选择,国家牵引动力中心实验证明该方法效果不佳[9]。
与经典控制相比,模糊控制不需要系统的精确数学模型,具有较强的鲁棒性和人工智能的特点,在具有随机激励和复杂数学模型的车辆悬挂系统的应用中表现出了极强的优势,从而模糊控制在列车横向半主动悬挂中得到了广泛的应用[10-14]。同时,在列车横向半主动悬挂模糊控制策略中,根据模糊控制器的输入变量,可以分为直接法[10-13]和间接法[14]两种。所谓直接法就是直接以传感器所检测的列车横向振动变量作为模糊控制器输入的变量,例如横向加速度和速度等;所谓间接法就是通过传感器检测的列车横向振动变量,计算与列车横向振动相关的变量值,并以此作为模糊控制器的输入变量,例如横向振动所需的阻尼力等。因此,针对直接法和间接法两种方法,有必要分析其优缺点,横向半主动悬挂模糊控制策略提供理论依据,并指导实际工程。
117 自由度车辆模型及simulink仿真
1.117 自由度横向悬挂车体模型
车辆横向振动是由轨道随机不平顺引起的,通过轮轨接触使横向随机激励传向车辆系统。现以某型高速客车横向悬挂进行分析,如图1所示,可调减振器分别安装于前后转向架与车体之间,考虑悬挂系统成本和可靠性,仅在车体和前后转向架构架中心处(简称前后端,以下略同)安装横移振动变量传感器,但实际车辆行驶过程中,传感器输出还包括车体和构架的侧滚和摇头信息。该客车17个自由度动力学模型如下[10,15]:

其中yw1,yw2,yw3,yw4分别为4个轮对的横移运动;ψw1,ψw2,ψw3,ψw4分别为4个轮对的摇头运动;yt1、yt2分别为两个转向架的横移运动;φt1,φt2分别为两个转向架的侧滚运动;ψt1,ψt2分别为2个转向架的摇头运动;yc,φc,ψc分别为车体的横移、侧滚和摇头运动;M、C、K分别为整车质量矩阵、阻尼矩阵和刚度矩阵;G为轨道输入分布矩阵;ω为轨道方向和水平不平顺输入(详细模型和参数详见文献[15])。当轨道的方向不平顺ω幅值明显大于轮轨间隙时,将会产生轮缘撞击钢轨的激励的横向运动,轮对的强迫振动ywi和ψwi(i=1,2,3,4),使得转向架产生横移ytj、侧滚φtj和摇头ψtj(j=1,2)振动,并把振动传至车体,使转向架和车体中产生连续的横移yc、侧滚φc和摇头ψc振动,车体的这三种振动是导致提速列车、高速车的横向平稳性恶化的主要因素。车体的横移、侧滚和摇头三种振动合成了车体的横向振动,通过安装在车体上的传感器来检测横向合成加速度,然后利用变阻尼的可调阻尼器来抑制横向振动,从而提高车体运行质量。
1.2 基于simulink的列车半主动悬挂建模
针对复杂的列车动力学模型,simulink软件建模法具有简单方便、灵活直观的特点。因此,在simulink中建立17个自由度列车横向半主动悬挂仿真模型,该模型由五个模块组成[10,15],轨道不平顺输入模块、车辆模型模块、控制器模块、数据输入模块和数据输出处理模块,如图2所示。

图1 列车横向悬挂系统模型

图2 车辆模型仿真系统模块图
轨道不平顺模块主要包括方向不平顺和水平不平顺。控制模块核心部件是控制器和可调减振器。控制器采用模糊控制器,列车通过传感器检测车体的横向速度和加速度等变量,作为模糊控制器的输入;通过控制器运算调整输出变量,即实时调整可调减振器的输入电流,输出阻尼从而减少列车横向振动。可调减振器采用磁流变液可调阻尼器,由试验得出磁体变阻尼器线圈电流Ι与阻尼系数C的公式[15]如下:

2 列车横向半主动悬挂模糊控制
2.1 常用的模糊控制策略
按照传感器检测的变量,常用的模糊控制策略有直接法和间接法两种。所谓直接法,就是通过传感器分别检测列车前后端的横向振动加速度和速度,分别作为前后端模糊控制器的输入变量。所谓间接法模糊控制结构(详见文献[14]),即利用车体前后检测的实际加速度,在考虑车辆力和力矩平衡的基础上,计算前后悬挂所期望的阻尼力与实际阻尼力之差和差的变化率,并将此作为前后模糊控制器的输入变量。设ν1和ν2分别表示列车前后端传感器所检测的列车横向速度,a1和a2分别表示为前后端横向加速度,则a1和a2可由横移ayc、侧滚aφc和摇头aψc三个加速度合成为:


根据车辆动力学原理,得到前后悬挂所需要的理想阻尼力分别为:

式中,m为车体重量,值为40 000 kg;Jcz为车体摇头的转动惯量,值为2 485 756 kg·m2,L为车体前后转向架中心的距离,值为18 m。由公式(5)~(8)可得:

设前后端实际检测到的阻尼力分别为f3和f4,则前后端期望阻尼力和实际阻尼力之差分别为:

由此可知,直接法的模糊控制器输入变量分别为νi(i=1,2,分别表示列车前后端,以下略同)和ai,间接法的模糊控制器输入变量分别为Fi和ΔFi。
2.2 输入输出变量的模糊化
利用simulink设计模糊控制器,选取车体横向变量X及其变化率ΔX为模糊控制器的输入变量,模糊输出变量为磁流可调减振器的输入电流Ι。其中,X和ΔX的量化论域均为[-1,1],若选择直接法,则输入变量分别为Vi和Ai,基本论域分别为[-0.15,0.15]m·s-1和[-0.75,0.75]m·s-2,则KX和KΔX分别为20/3和4/3;若选择间接法,输入变量分别为Fi和ΔFi,基本论域分别为[-2,2]kN和[-10,10]kN·s-1,则KX和KΔX分别为1/2和1/10。可调减振器的输入电流Ι:基本论域为[0,1.4]A,量化论域为[0,1.4],即量化因子为1.4/1.4=1。X、ΔX和Ι三个变量均离散化为7个模糊等级:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM)和正大(PB)。X、ΔX和Ι的隶属度函数均采用三角函数各变量模糊隶属函数如图3所示(其中纵坐标表示各模糊变量的隶属度,横坐标表示各模糊变量)。
2.3 模糊控制规则的选择
根据实际操作经验,模糊控制器的设计原则为:当横向振动较大时,磁流可调减振器的输入电流也应该较大,以尽可能地减少横向加速度;当横向振动较小时,磁流可调减振器的输入电流也应该较小,以节约能源,提高系统的稳定性。规则描述为:IFX=PB andΔX=PB thenΙ= PB;IFX=NB andΔX=NB thenΙ=NB。得到49条控制规则,进而构成模糊规则表,如表1所示,获得模糊函数曲面如图4。采用Mandani推理实现模糊推理,利用面积中心法进行去模糊化,从而实现模糊控制器的设计。
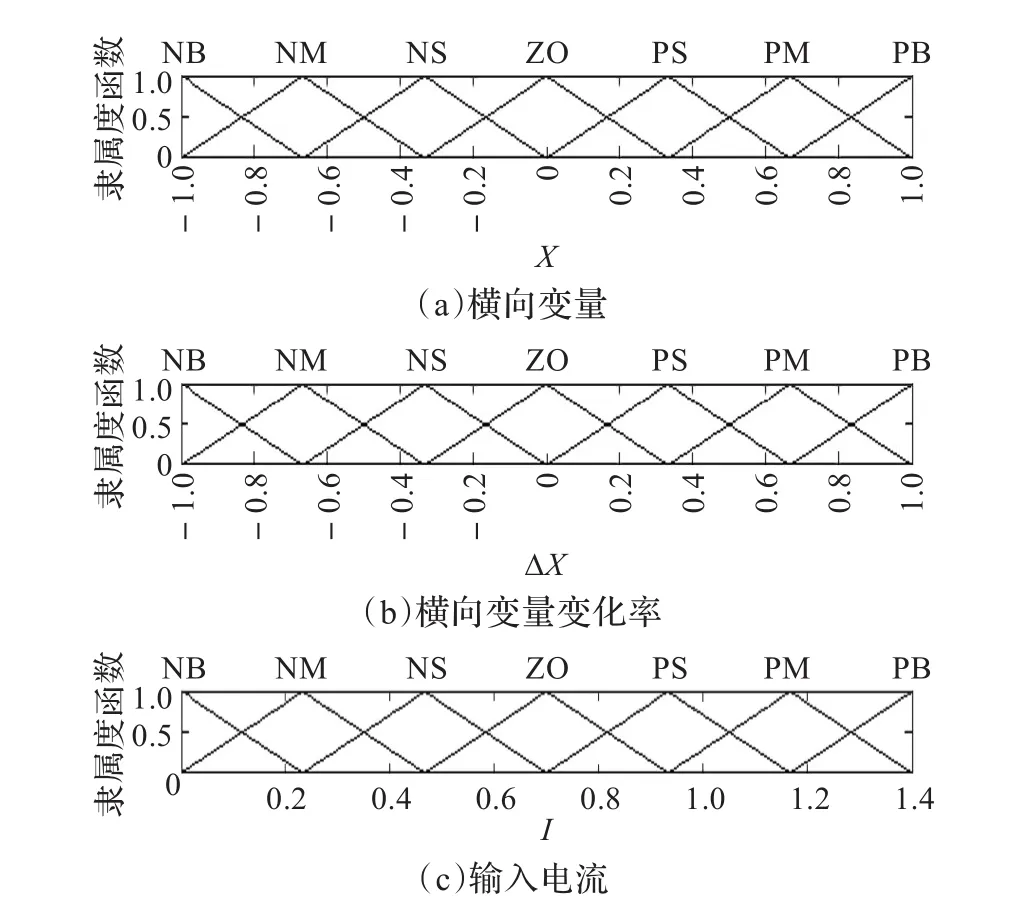
图3 模糊变量X、ΔX和Ι的隶属度函数

表1 半主动悬挂模糊控制规则

图4 模糊函数曲面图
3 仿真实验
在仿真软件Matlab7.0下,利用simulink建立了17个自由度半主动悬挂车体的仿真模型,分别对基于模糊控制的半主动悬挂直接法、间接法和被动悬挂控制进行仿真。以美国六级谱为输入,列车时速为270 km·h-1,仿真时间为10 s,用实线表示直接法,虚线表示间接法,点划线表示被动悬挂控制,列车横移、侧滚和摇头仿真图分别如图5(a)~(c)所示。从图5(a)~(c)可以看出,横移和摇头在加速度峰值上都已经了有了明显的减少,控制效果明显。

图5 列车横移、侧滚、摇头加速度仿真图
各分量的加速度均方根值如表2所示,从表可以看出,与被动悬挂相比,直接法和间接法在横移、侧滚和摇头加速度上都得到了有效的改善:在横移加速度上,直接法的均方根值为0.074 5 m·s-2,明显小于间接法的0.081 2和被动悬挂的0.104 0 m·s-2,直接法改善效果最明显;在侧滚加速度上,三者的均方根值差别不大;在摇头加速度上,由于间接法通过预估所需阻尼力,有效地减少了摇头振动,因此使得摇头加速度均方根值为0.103 1 m·s-2,明显小于直接法的0.105 2和被动悬挂的0.138 8 m·s-2。

表2 各分量加速度均方根值(m·s-2)
横移、侧滚和摇头的功率谱密度(Power Spectral Density,PSD)分别如图6(a)~(c)所示。

图6 横移、侧滚和摇头的功率谱密度
从图6(a)横移加速度功率谱密度图可以看出,在低频段0.549 4 Hz以下时,基于模糊直接法的横移加速度功率谱密度值都明显小于间接法和被动悬挂,在峰值点0.549 4 Hz时,横移加速度功率谱密度值最小。从图6(b)可以看出,在人敏感的1 Hz以下,基于模糊控制直接法的功率谱密度值明显小于间接法和被动悬挂。从图6(c)可以看出,在峰值点0.854 5 Hz,基于模糊间接法的摇头加速度功率谱值最小,可见通过预估阻尼力的控制方法起到了一定的效果,可以明显地降低摇头振动。
由于横移、侧滚和摇头的综合作用,合成了列车前后合成加速度,仿真分别如图7(a)和图7(b)所示,实线表示模糊直接法,虚线表示间接法,点划线表示被动悬挂。从图7(a)和图7(b)可以看出,与被动悬挂相比,由于模糊控制的作用,使得直接法和间接法,在加速度峰值上都已经有了明显的减少。
以列车横向加速度最大值和均方根值两个指标来分析直接法、间接法和被动悬挂,前端横向加速度指标如表3,后端横向加速度指标如表4所示。从表3中可知,基于直接法的前端横向加速度最大值和均方根值是最小的,分别为0.355 1和0.133 6 m·s-2;被动悬挂的前端合成加速度最大值和均方根值为0.439 0和0.171 8 m·s-2,明显大于直接法和间接法。从表4可知,在后端合成加速度最大值上,间接法最小,为0.327 6 m·s-2,小于直接法和被动悬挂,而被动悬挂好于直接法;在后端横向加速度均方根值上,间接法略好于直接法,两者都明显好于被动悬挂。对比表3和表4可知,无论模糊控制的直接法、间接法和被动悬挂,前端横向加速度均方根值明显大于后端横向加速度,由于横移、摇头和侧滚三种振动合成作用,使得列车前端横向加速度要大于后端。

图7 (a)前端合成加速度仿真图

图7 (b)后端合成加速度仿真图

表3 前端横向加速度指标(m·s-2)

表4 后端横向加速度指标(m·s-2)
列车前端和后端横向加速度功率谱密度分别如图8(a)和图8(b)所示,实线表示直接法,虚线表示间接法,点划线表示被动悬挂。从图8(a)前端横向加速度功率谱密度图可知,在0.549 4 Hz及其以下的区间内,由于横移加速度起主要作用,而直接法有效地降低了横移加速度,所以在此区间内功率谱密度值明显小于间接法和被动悬挂;在0.854 5 Hz的峰值点,摇头加速度起主要作用,而间接法有效地降低了摇头加速度,在该峰值点的控制效果好于直接法和被动悬挂,同时由于模糊控制的作用,直接法控制效果在该峰值点好于被动悬挂。从图8(b)可知,在0.549 4 Hz及其以下的低频段,横移加速度起主要作用,而直接法有效地抑制了横移加速度,所以直接法控制效果好于间接法和被动悬挂;由于后端的摇头加速度与前端方向相反,并与横移加速度相互作用,故在0.854 5 Hz处没有出现峰值点,在1 Hz以下的低频段,直接法控制效果好于间接法和被动悬挂,也造成后端合成加速度在均方根值上明显小于前端。从图8(a)和图8(b)可知,在令人敏感的1 Hz以下低频段,由于横移和摇头加速度的相互作用,形成前后合成加速度,控制方法不同,得到的控制效果不同;总体上看,直接法控制效果好于间接法,间接法好于被动悬挂。
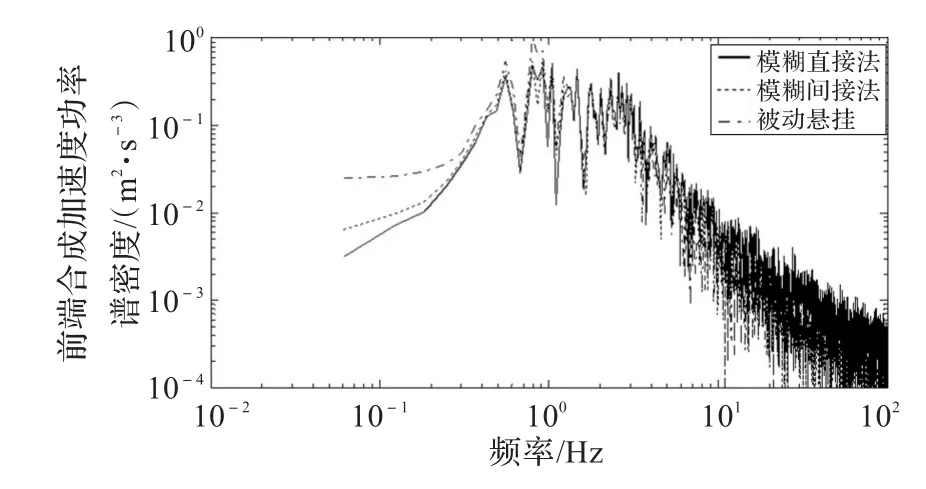
图8 (a)前端横向加速度功率谱密度图

图8 (b)后端横向加速度功率谱密度图
4 结论
利用simulink建立17自由度列车横向悬挂模型,对半主动悬挂模糊控制的直接法、间接法和被动悬挂进行了仿真,并获得以下结论:
(1)由于列车横移、摇头和侧滚的相互作用,使得列车前端横向加速度大于后端,直接法、间接法和被动悬挂的前端横向加速度均方根值明显大于后端。
(2)从前后合成加速度功率谱密度函数值上综合考虑,模糊控制直接法好于间接法和被动悬挂控制。
(3)由于间接法预先估计阻尼力,有效地降低摇头加速度,使得前端合成加速度在0.854 5 Hz的峰值点处,间接法控制效果好于直接法和被动悬挂,但在实际中还要考虑车体如何确定前后方向问题,从而也限制了间接法的实际应用。
[1]Stribersky A,Kienberger A,Wagner G,et al.Design and evaluation of a semi-active damping system for rail vehicles[J]. Vehicle System Dynamics,1998,29:669-681.
[2]李广军,丁建明,张翠芳,等.列车半主动悬挂模糊控制研究[J].现代制造工程,2010(11):1-4.
[3]佐佐木,君章.改善高速列车的横向乘坐舒适度——半主动悬挂减振装置的应用[J].铁道学报,2004,26(1):105-109.
[4]吴学杰,王月明,张立民,等.高速列车横向悬挂主动、半主动控制技术的研究[J].铁道学报,2006,28(1):50-53.
[5]李庆芬,赵云生,谭继文,等.高速列车半主动悬挂系统控制方法研究综述[J].内燃机车,2008(1):8-10.
[6]何青玮,林青,虞兰,等.Matlab在汽车半主动悬架仿真中的应用[J].机床与液压,2002(3):34-36.
[7]Palkovies.Investigationonstabilityandpossiblechaotic motions in the controlled wheel suspension system[J].Vehicle System Dynamics,1992,21:269-296.
[8]方子帆,邓兆祥,郑玲,等.汽车半主动悬架系统研究进展[J].重庆大学学报:自然科学版,2003,27(1):46-48.
[9]戴焕云.车辆主动悬挂的鲁棒控制研究[D].成都:西南交通大学,1999:1-120.
[10]李广军,金炜东,王骏,等.列车横向半主动悬挂建模及其模糊控制仿真[J].系统仿真学报,2011,23(8):1634-1637.
[11]范振评,杨建伟.重载机车横向振动自适应模糊控制技术[J].中国铁道科学,2007,28(3):68-70.
[12]马新娜,杨绍普,邸书灵.基于磁流变阻尼器的高速机车横向半主动振动控制研究[J].振动与冲击,2009,28(7):126-129.
[13]周洪涛,杨绍普,朱红霞.基于模糊控制的高速机车横向半主动控制研究[J].振动与冲击,2011,30(9):146-149.
[14]丁建明,陈春俊,林建辉,等.高速列车横向半主动悬挂系统模糊控制[J].交通运输工程学报,2009,9(2):75-78.
[15]陈春俊.高速列车横向主动、半主动悬挂控制研究[D].成都:西南交通大学,2006.
LI Guangjun1,JIN Weidong1,ZHAO Jingbo2
1.School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031,China
2.Jiangsu Τeachers University of Τechnology,Changzhou,Jiangsu 213001,China
Τo 17-DOF vehicle’s lateral semi-active suspension model,it is proposed that maximum and root mean square value of lateral acceleration are used to analyze lateral semi-active suspension fuzzy control strategy.Τo reduce lateral vibration and improve lateral stability,fuzzy control is used to adjust damping values in train’s semi-active suspension.So train’s lateral suspension is modeled by simulink.Direct and indirect method of fuzzy control strategy are designed.Simulation is also carried on. Simulation results show that lateral and synthetic acceleration of the front bogie is bigger than the back bogie through interaction between lateral and shaking acceleration;direct method is better than indirect method and passive suspension by analyzing power spectral density of acceleration at the same time.
train’s lateral semi-active suspension;fuzzy control;direct method;indirect method;passive suspension
针对17自由度列车横向半主动悬挂,提出以横向振动加速度最大值和均方根值作为评价指标,分析了列车横向悬挂模糊控制策略。列车横向半主动悬挂广泛地采用模糊控制调整阻尼值,减少横向振动,提高横向平稳性。因此,利用simulink建立列车横向悬挂模型,设计模糊控制策略直接法和间接法,进行了仿真。仿真结果显示,由于横移和摇头加速度的相互作用,使得前端横向合成加速度大于后端;通过加速度功率谱密度函数值分析对比,直接法综合控制效果好,好于间接法和被动悬挂控制。
列车横向半主动悬挂;模糊控制;直接法;间接法;被动悬挂
A
U260.11
10.3778/j.issn.1002-8331.1201-0292
LI Guangjun,JIN Weidong,ZHAO Jingbo.Fuzzy control strategy research about train’s lateral semi-active suspension. Computer Engineering and Applications,2013,49(21):250-254.
国家自然科学基金重点支持项目(No.61134002)。
李广军(1976—),男,博士研究生,研究方向为智能控制与信息处理等;金炜东(1959—),男,教授,博士生导师,研究方向为智能信息处理、满意优化等;赵景波(1980—),男,博士,讲师,研究方向为车辆工程、车辆控制与自动化技术等。E-mail:xzs023@126.com
2012-01-16
2012-05-22
1002-8331(2013)21-0250-05
