蛇形机器人生命探测系统的设计
2013-07-17鲍天哲郑源飞吴湘华
鲍天哲 郑源飞 吴湘华
中南大学交通运输工程学院,长沙 410075
引言
蛇形机器人具有稳定性好、横截面积小、适应地形能力强等特点,可以翻越障碍,甚至实现水陆两栖的自由运动[1]。若配之以合适的人体生命探测器,将在抢险救灾、军事侦察等方面有着广阔的应用前景。
目前世界上较为成熟的生命探测技术主要有音频探测、视频探测、红外探测、雷达式探测、气敏探测等,可以在不同环境下利用人体不同的生理特征成功地探测生命。但现有的技术和产品过度追求信号的穿透性能和高精度的定位,往往电路复杂、体积过大,需救援人员手持操作,无法应用于蛇形机器人。而后者也因为小巧灵活,可以通过缝隙、钻入废墟,最大程度上接近被困人员,所以对其探测性能的要求可适当降低。
基于此,我们设计了一种适用于蛇形机器人的生命探测系统,主要由改进的微型热释电红外传感器、三甲胺体液传感器和相应处理电路组成。热释电传感器适用于常温环境,而体液传感器在温度较高时效果明显,二者的配合使用,蛇形生命探测器抵抗温度干扰的能力可得到较大提高。
1 热释电红外传感器基于蛇形体的设计
热释电红外传感器又称为人体运动传感器,它利用铁钛酸铅汞陶瓷等材料的热释电效应检测区域内移动的人体,具有体积微小(2·1mm)、灵敏度高、技术成熟等优点,是比较适合蛇形机器人的一类传感器。其内部主要构造为:光学滤镜、场效应管、热释电元件、偏置电阻等元器件。其中光学滤镜的主要作用是只允许波长在7.5mm~14mm范围内的红外线通过,而将太阳光及其他辐射滤掉。由于人的正常体温为36℃~37℃,根据维恩位移定律:
λm·T=2989(μm·k)(λm-最大波长,T-绝对温度)
可知,其辐射的红外波长峰值为9μm~10μm,恰好在在滤光片的响应波长的中心处,故热释电人体红外传感器只对近似人体体温的动物有敏感作用。当无人体移动时,热释电红外感应
器感应到的只是背景温度;当有人体进入探测区域并移动时,两片热释电元件通过菲涅尔透镜的聚焦吸收人体红外辐射,并利用角度不同而接收到热量不同的原理,感应到人体温度与背景温度的差异,经处理后输出电压信号。[2]常用的处理电路是BISS0001芯片组成的典型应用电路[3],可将热释电元件输出的脉冲形式的信号电压经处理为规范的高低电平信号。
但被动式热释电传感器有其明显的缺点:1)人体静止时,热释电元件的两个受光电极同时受到红外线照射,输出电压相互抵消,无法探测静止人体;2)当环境温度与人体温度接近时,传感器的灵敏度大大降低。因此普通的热释电传感器还不能直接应用于蛇形机器人。
针对第一种问题,我们设计了一种在常温环境下可以探测静止人体且适用于蛇形机器人的探测机构,其工作原理为:热释电传感器焊接在一传动轴上,其管脚通过轴内的导线与蛇体内部的处理电路相连;直流电机驱动一组锥齿轮轮对,带动传动轴和传感器沿轴线转动,从而实现探测器与静止人体的相对运动。其机构原理图如图1所示。当探测器与前方人体产生相对运动特别是与探测半径垂直的横切移动时,传感器可以敏感的检测到红外辐射能量的变化,从而成功的检测出静止的人体。
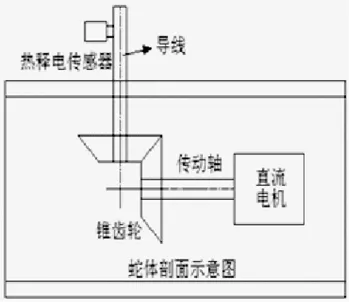
图1 探测机构原理图
结合课题组此前研究的蛇形生命探测器的驱动部分[1],我们将传感器的空间排布设计为如图2所示。三个传感器及其传动轴在横截面内呈120°角均布,由一个直流电机通过齿轮对同时驱动;传动轴与蛇形体连接处用o型圈密封,可实现防尘、防水的效果;传感器传动轴要明显短于螺旋轮的传动轴,以防受到障碍物的剐蹭破坏。为了减少移动时尤其是水中运动时的阻力,此设计主要应用于蛇形生命探测器的首位节,其他节蛇形体则在其表面焊接有热释电传感器,其排布方式也类似。这样,蛇形体在废墟等处移动时,两侧被困的人体与传感器产生相对运动,使其产生响应。
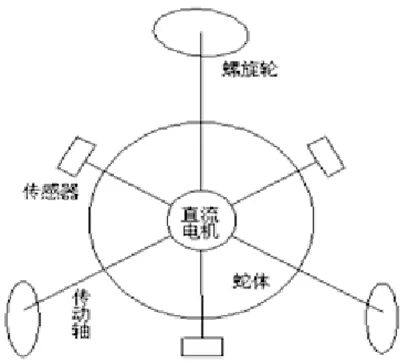
图2 空间排布示意图
此外,为了尽可能增大探测范围,我们对传统的热释电传感器做了进一步改进。如图3所示,球缺状的菲涅尔透镜与底座相连,可将探测空间的红外线有效地集中到传感器上;三个红外探头焊接在底座上,其投影在底座平面呈120°角均布。参阅已有的研究成果可知,通过细化透镜的感应区段,即采用多敏感元,可大幅提高透镜的分辨率,从而减小人体的相对移动幅度,[4]进一步提高传感器的性能。
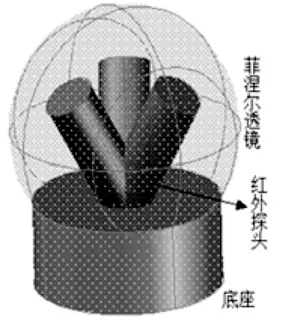
图3 传感器实物示意图
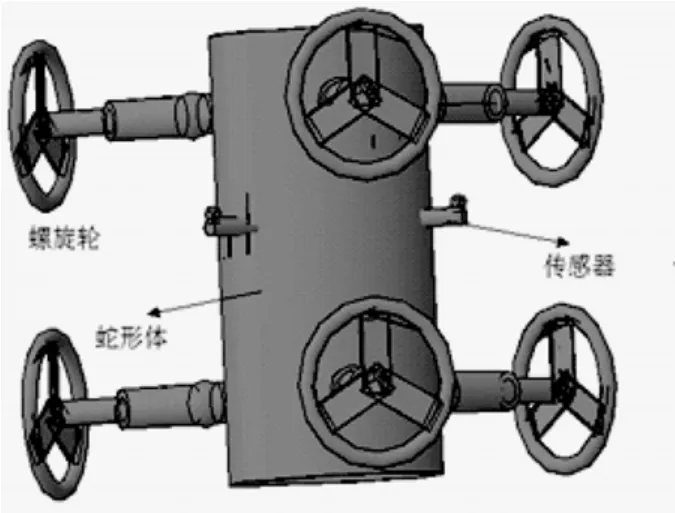
图4 蛇形体局部示意图
2 三甲胺体液传感器的设计
虽然上述设计解决了热释电传感器无法探测静止人体的缺陷,但随着背景温度的升高, 温差随之减小,传感器的输出将下降。[4]当环境温度与人体体温接近时,灵敏度则急剧降低,甚至出现短时失灵的现象。而此时,人体体液分泌旺盛,体液所含分子的热运动也更为剧烈,设计一种对此类分子敏感的传感器,可以有效解决上述问题。
由生物化学的知识可知,人体体液中含有少量的三甲胺,这些三甲胺可以由汗液挥发到空气中。考虑到只有在大型人畜存在时,环境中的三甲胺才能达到一定浓度,因此可将三甲胺的浓度作为探测信号来判断是否有人体存在。目前检测三甲胺的传感器主要采用半导体金属氧化物作为敏感元件,例如TiO2、SnO2、ZnO、WO3、Nb2O5、In2O3、Cr2O3及NiO等。此外,为了提高对三甲胺的灵敏度,常加一些贵重金属等作为敏化剂。[5]
由于此三甲胺传感器要安装在蛇形机器人上,所以要求其具有体积微小、灵敏度高、处理电路简单等特点,且其探测范围要涵盖人体散发出的三甲胺浓度。为此,在文献[6]的设计基础上,提出了一种Ru/TiO2型三甲胺传感器。其设计电路如下所示
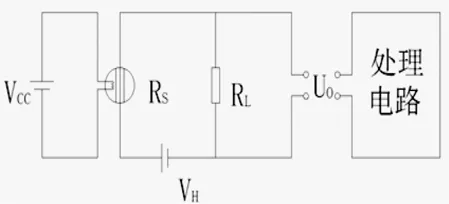
图5 传感器电路图
元件RS为传感元件的气敏电阻,PL为负载电阻,Vcc为加热电压,VH为回路电压,UO为输出电压,后接有放大、滤波等处理电路。三甲胺生命传感器安装在蛇形体中,在蛇体壁上开一个通风口,使得外界气体导入传感器并与敏感元件充分接触。当人体散发的三甲胺与传感器的气敏元件反应时,后者阻值改变,引起负载电阻端电压变化。由于电压值随着负载电阻的变化是单调的,所以每一个电压值会对应一个三甲胺浓度值,当电压值达到与人体散发的三甲胺浓度对应的范围时,即可确定有生命存在。经检验,这种Ru/TiO2型三甲胺传感器元件,能感应到浓度为5.0×10-7ppm的三甲胺[6],可将此传感元件用在生命探测上。
3 结语
本文基于对传统生命探测器的再创新,提出了一种适用于蛇形机器人的生命探测系统。通过改造热释电传感器,克服了其无法探测静止人体的缺陷;运用三甲胺体液传感器,可以在高温环境下实现有效的探测。本系统具有微小、稳定、灵敏、实用等特点,结合运动灵活的蛇形机器人,可以较好的完成人体探测等任务。此蛇形生命探测器有着重要的现实意义,将会在众多领域发挥巨大作用。
[1]郑源飞,鲍天哲,朱春丽,等.蛇形生命探测器的驱动设计[J].中国科技论文在线精品论文,2012,5(16):1559-1562
[2]王均福,袁红霞,王景聚.热释电红外传感器在防入侵方面的研究[J].哈尔滨师范大学自然科学学报,2008,24(1):31-34
[3]宋保业.基于BISS0001的热释电红外开关[J].电子元器件应用,2007,(9)7:1-3
[4]冯涛,李新,蔡睿洁,等.热释电红外敏感器的温差响应特性[J].弹箭与制导学报,2010,(5):218-220
[5]张忠孝,孟阿兰,李厚福,张艳臣.测量鱼鲜度的三甲胺IN[(CH3)3]半导体金属氧化物传感元件的研制[J].传感器技术,1995,14(3):31
[6]张忠孝,耿曼利,李厚福.Ru/TiO2型三甲胺(TMA) 传感元件的研制[J].传感器技术,1996,(2): 27
