刚性联接的双电机驱动设备电流调整
2013-07-14徐立成
徐立成
作者通联:上海船厂船舶有限公司生产保障部 上海市崇明县江海公路1号 202164
E-mail:xulichengsh@163.com
大型设备多采用两台电机同时驱动,机械结构多数为刚性联接,即两台电机同轴驱动1个变速机构。这种机械传动结构的特点是两台电机的转速完全相同,但普遍存在两台电机的出力和电流不相同的现象,有时相差很大,调整也有一定难度。下面以上海船厂船舶有限公司设备为例,分析不同类型电机的双机驱动中电流差异大的原因,介绍调整原理和方法。
一、直流电机刚性联接的双机驱动
直流电机过载能力较强,调速方便,线路相对简单,以往大型设备广泛采用两台直流电机刚性联接驱动。公司100t、80t 门座式起重机的主钩机械传动采用这种类型。100t 门机主钩电机型号为ZZ-62,电压DC 220V,电流234A,功率46kW,额定转速580r/min,励磁电流6A。2005年门机由浦东搬至崇明,经过安装大修,试车时发现两台主钩电机(设定左机为MA、右机为MB)并举时的电枢电流相差很大。双机并举吊重起升时,MA的各挡电枢电流远大于MB的电枢电流,下降时正好相反。当时测量第三挡起升电流(联动台上设有电枢电流表),左机IA为300A,右机IB为60A,显然左机已严重超载,右机却轻载。
根据设备电气原理图可知,双机电枢共用一台直流电源,主钩调速为调压调速,通过主令开关操纵各挡变压器电源(每挡变压器电源输出AC 66V),使整流合成后的直流电压分为高低五挡。左右两台直流电机的励磁供电DC 220V 各自独立。设备在制造配置直流电机时不仅保证电机型号相同,而且为同一厂家的同一批次产品,尽量使两台电机在参数性能上对称。
直流电机的主磁极材料、导磁率μ和气隙δ 对磁通Φ 影响很大。电机长期使用,经过大修解体装卸、振动、温度等因素影响了μ和δ,导致磁阻发生变化。这样相同的励磁电流会产生不同的Φ,因此两台电机的电枢电流产生很大差异。从直流电机的基本原理进行分析,直流电机转速特性方程n=U/(CeΦ)-IR/(CeΦ)。当两台电机的磁通¢不等时,它们的理想空载转速nA0、nB0和转速特性曲线也不一致(图1),ΦB>ΦA,因此nB0<nA0,MA的斜率大于MB的斜率,即R/(CeΦA)>R/(CeΦB)。
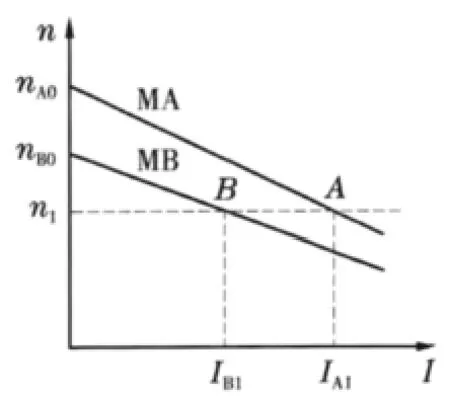
图1 磁通不等时两台电机转速特性
由于两台电机刚性联接,因此转速n1相同,两台电机分别运行在A 点和B 点,IA1>IB1。在外加电压相同的条件下,吊重上升时MA 出力大于MB 出力,电枢电流相差很大。在吊重下降时两台电机处于发电制动状态,主回路见图2,其中U为有级可调整流电源,共分为五挡,MA、MB为直流电机,4rd为钩子下降制动电阻,4JA11为下降制动接触器。当钩子上升时4JA11 吸合,断开制动电阻,钩子按上升挡位正常速度上升;空钩下降时,脚踏开关控制4JA11 吸合,这时没有制动,空钩快速下降;当钩子吊重下降时,4JA11 失电,4rd和电机电枢并联,两台电机处于发电制动状态,钩子重物匀速下降,下降速度受到限制。图2 右侧是钩子重物制动下降时的简化电路,重物势能通过MA、MB 发电并和4rd 构成闭合回路。电源U 是二极管整流装置,具有单向导电性能,此时没有电流通过,两台电机的反电势分别为EA=CeΦAn,EB=CeΦBn,ΦB>ΦA,因此EB>EA,IA2<IB2。这就造成重物下降时两台电机的电流关系正好和吊重上升时相反。
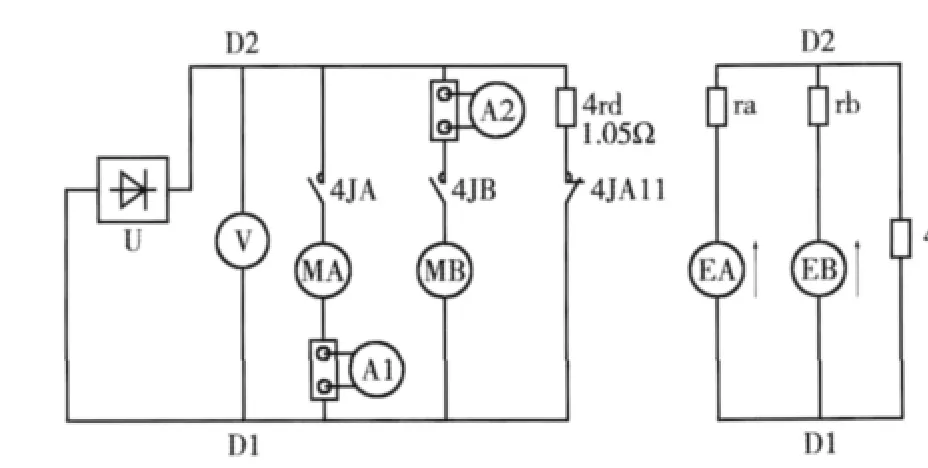
图2 电机发电制动主回路
根据以上分析,只要改变电机的磁通Φ,便可改变电机的空载转速和斜率,从而使两台电机转速特性接近,使它们的出力和电枢电流接近。为避免主磁极磁通趋于饱和,具体采用减小励磁电流的办法,改变磁通量Φ。该例中,减小MB的励磁电流IfB,即逐步增大串接于MB 励磁回路中的电阻RfB,使MB的理想空载转速nB0升高,向MA的理想空载转速nA0靠近,这样减小了两条曲线的差异。经过多次调整,两台电机出力基本平衡,电枢电流相互接近,一般电流的差异控制在10%以内。
二、交流异步电机刚性联接的双机驱动
1.三相绕线转子异步电机的刚性联接
老式起重设备都使用三相绕线转子异步电机,其转子回路中串接电阻实现启动和调速。船台两侧的120t 门机主钩采用两台绕线转子异步电机同轴驱动,要求两台电机型号相同,但不一定是同厂家、同批次产品。电机型号为YZR315-8、75kW,额定转速725r/min,额定转差率SN=0.0333。120t 门机主钩电机转子电阻电路见图3,电阻器型号RS54-315M-8/12J,三相对称电阻,每相5 段,电阻器具有抽头,供调整时使用。绕线转子异步电机的机械特性由其转子回路电阻值决定。同一型号电机的转子电阻值不可能完全相同,因此机械特性不可能完全一样。这样在双机并举吊重中,它们出力不可能相等。图4为两台绕线转子电机A和B的机械特性曲线,它们的转子回路电阻值分别为rA和rB,rB>rA,电机A的机械特性较硬,曲线斜率较小。两电机并举吊重上升时,转速为n1,电机A和B 分别工作在a、b 点,对应转矩为T1、T2,且T1>T2。电机的转矩与其电枢电流成正比,因此双机吊重上升时,电机A的电流大于电机B的电流。当双机吊重下降时,在重物作用下电机处于发电制动运行状态,机械特性曲线延伸至第四象限,此时转速为n2,电机的转矩和转速反向,电磁转矩分别为T3、T4,且T3<T4,即电机A的电流小于电机B的电流。从图4 可知转子回路电阻值小的电机机械特性较硬,在双机吊重上升时它的电流较大,在重物下降发电制动时它的电流较小。
钩子双机并举时,当刚性联接的三相绕线转子异步电机电流明显不同时,为使两台电机电流接近,可人为调整它们的机械特性:①增加机械特性较硬的电机转子回路电阻值(该例中R11、R21和R31),降低其特性硬度,减小其电流;②或减小机械特性较软的电机转子回路电阻值,提高其特性硬度,增大其电流。
2.三相变频电机刚性联接
公司近年来新置设备中都应用变频调速,其中大型设备也采用双机刚性联接。7 万t 船台两侧自制的150t 门机(2号车)的主钩采用两台变频电机同轴驱动。变频电机型号为YZP315M2-8,110kW,50Hz,380V,220A;变频器为安川CIMR-G7B型电流矢量控制通用变频器,功率160kW,电流302A。2004年6月,该门机试运行,发现双机并举吊重时,主钩两台变频电机电流不平衡。当时双机并举变频器设置为速度/力矩控制,即电机A为主机,其变频器A为速度控制;电机B为从机,其变频器B为力矩控制。变频器A 输出力矩信号,经通信电缆施加于变频器B,这样主机控制从机的输出力矩。由于通信需要约30~50ms 时间,因此从机永远落后于主机。为此,将双机并举时的控制方式改为双机速度控制,即两台变频器同时接受PLC 速度控制,没有主从之分,表1 是两台电机在吊重升降时的电流值(双机并举)。分析表1 数据得出:①两台电机并举吊重升降时各挡电流差的绝对值大于30%。②吊重上升时电机A 电流大,下降时电机A 电流小。

图3 120t 门机主钩电机转子电阻电路
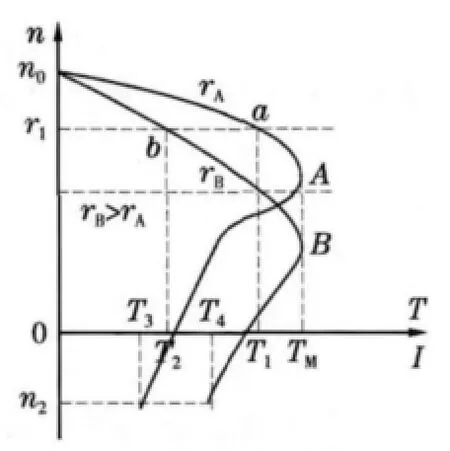
图4 绕线转子电机机械特性曲线
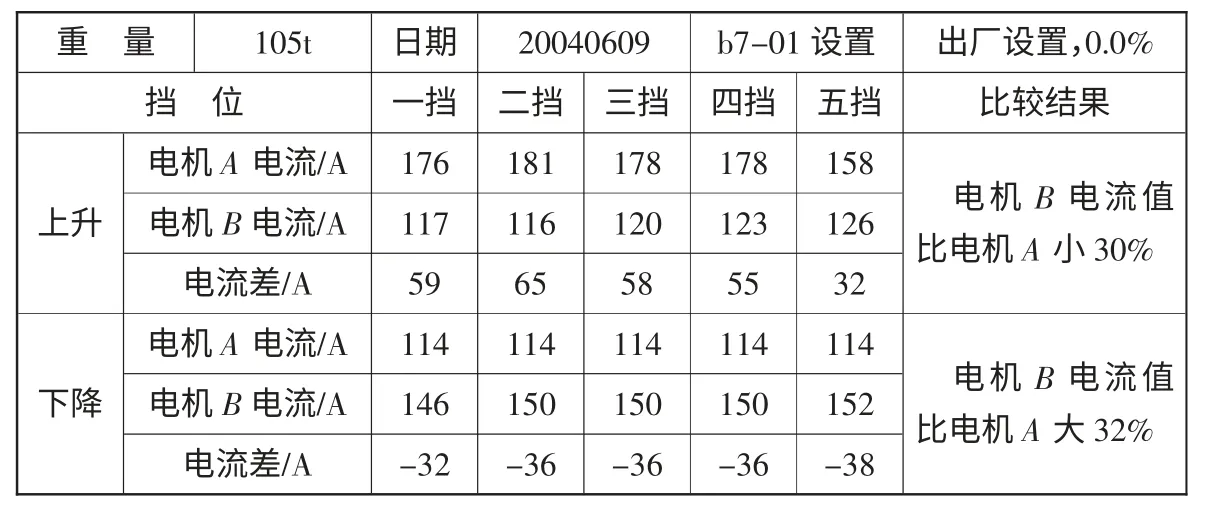
表1 DROOP 关闭时双机并举电流值
A、B 两台电机的电流相差30%以上,降低了出力大电机的超载能力,严重影响该门机正常工作。b7-01 是DROOP Quantity(下垂量)控制功能,可任意设定电机滑差量S。在变频器输出最高频率(100Hz)时,额定转矩下,速度指令值和实际转速值差值(滑差量)的百分数为b7-01 设置值。出厂设定b7-01为0.0%,这时DROOP 控制功能不工作,处于关闭状态,电机按照其固有特性曲线运行,其滑差率为固有滑差率。b7-01的设置值范围是0.0%~100%,对应的理论转速值见表2,当指令频率不变时,电机实际转速随着b7-01 增大而减小,电机机械特性变软。b7-01 设置值越大,两台电机的特性曲线越靠近,出力更接近,即设置b7-01 非零值后(打开DROOP 功能)可缩小两台电机出力差值。为防止电机机械特性太软而吊不起额定吨位工件,b7-01 参数设置不能太大。兼顾出力平衡和机械特性硬度,最终选择b7-01为3%,吊重时测试电机电流值(表3),两台电机电流差值明显减小。

表2 实际转速和b7-01 设置值关系

表3 DROOP 开启时双机并举电流值
变频电机双机并举吊重上升和下降时的电流差异情况和三相绕线转子异步电机相似,吊重上升时机械特性较硬的电机电流较大;重物下降时电机处于发电制动状态,机械特性较软的电机电流较大。
三、结束语
电机在刚性联接条件下,由于固有机械特性不同,双机驱动普遍存在出力不均等问题。修改一些参数,人为改变机械特性可缩小这种差异,实际上这是损失了部分机械特性硬度,使它的机械特性变软。因此调试中既要考虑两台电机出力平衡,也要顾及其机械特性硬度,没有必要追求两台电机的电流值完全相等,一般将两台电机的电流之差控制在10%以内即可满足运行要求。
