AUV水下对接技术发展现状
2013-07-05羊云石顾海东
羊云石 顾海东
(第七一五研究所,杭州,310012)
AUV水下对接技术发展现状
羊云石 顾海东
(第七一五研究所,杭州,310012)
AUV水下对接技术是一种可以为AUV提供能源补充和信息交换的系统,从而极大地增强AUV的长期及远程工作能力。通过接驳形式、接驳传感器、接驳控制策略、水下传输技术四个方面的综述,阐述了AUV水下对接的方法、相应的关键技术以及发展现状与趋势。
AUV;水下对接;信息交换;能源补充
随着信息技术的不断发展,自主式水下无人航行器(AUV)作为探索海洋空间的有力工具之一,在军事和科学研究方面起着越来越重要的作用。未来的AUV需要更长的水下工作时间、更大的自主性、更隐蔽的情报收集能力、更高速的数据分析速度以及更强大的通信能力。而这些目标的实现主要受到自身携带能源和水下通信两个因素的限制。由于几十年来电池技术一直没有获得突破性进展,AUV的水下工作时间仍然很短,需要频繁的回收和布放。此外水声通信速率较低,AUV难以及时回传所收集到的数据。两者均极大增加了AUV的使用成本,降低了其工作效率。因此,AUV水下对接技术作为一种为其提供能源补充与信息交换的补给支持系统就显得十分必要。
1 AUV水下对接形式
上世纪90年代以来,国外研究者根据各自AUV的不同特点和对接目标,设计出了各种AUV水下对接系统,主要可以分为三类[1]。
1.1 捕捉式对接
捕捉式对接是指AUV利用头部捕捉装置捕捉对接装置上的绳索、杆类等导向目标,然后沿导向装置运动,完成对接。该种对接方式的优点主要是可以全方位对接,受周围环境影响较小,对接的可靠性较高;缺点是对接基站的结构比较复杂,同时对水下航行器的改动也较大。这种对接方式中最具有代表意义的是美国的Odyeesy II AUV水下对接系统,原理如图1所示[2]。AUV在超短基线的引导下驶向对接装置,然后依靠前进冲量实现头部V型捕捉装置与垂直杆的对接,并通过电磁感应系统进行充电和信息传输。该型AUV水下对接装置由Woods Hole海洋研究所和MIT海洋实验室共同研制,应用于海洋自主采样网络系统(AOSN)。

图1 Odyeesy II AUV捕捉式对接装置
1.2 包容式对接
包容式对接是指对接装置采用导向罩或者笼箱等结构形式对AUV进行导向,使AUV进入对接管或者对接箱笼内完成对接。包容式对接中的对接装置本身可以包容AUV,在对接口附近采用渐缩形的入口装置对AUV进行引导,使其进入预定轨道实现两者的对接。这种形式的对接方式较容易受到海流的影响,优点是对接装置本身并不是特别复杂,也不需要对水下航行器进行特别的改造,并且在AUV对接后具有保护作用。
典型的包容式对接装置有美国的REMUS AUV水下对接系统[3](图2)和MBARI研究所开发的水下对接系统[4](图3)。

图2 REMUS AUV包容式对接装置

图3 Bluefin AUV包容式对接装置
REMUS对接装置由Woods Hole海洋研究所研制,由圆柱型坞站和锥形引导口组成,采用超短基线引导AUV回归,并用水密电连接器进行充电和数据传输。MBARI研究所为Bluefin AUV开发的水下对接系统基本与REMUS对接装置相似,主要应用于海底观测网络中。
1.3 平台式对接
平台式对接是指AUV采用飞机降落的方法降落于对接平台上,锁定对接的形式。该种形式的对接方式与飞机在航空母舰上的降落情形非常相似。该方式对水下航行器的动力系统以及自导系统要求较高,具有代表意义的是日本的Marine-bird水下对接系统,对接原理示意图见图4[5]。该对接平台通过短基线引导AUV回归,并用V型拦截装置捕捉AUV下方的挂钩,最后通过感应线圈进行充电。

图4 Marine bird水下对接平台
2 接驳传感器
AUV要实现对接功能,必须实时测量其与对接装置的距离、方位和深度信息。根据传感器的原理不同,现阶段国外AUV采用的对接传感器有三类:声学传感器、光学传感器和电磁传感器。
2.1 声学传感器
AUV使用的声学传感器一般指的是超短基线(USBL)。与其他几种传感器相比,声学超短基线的作用距离远(大于2000 m),受到的环境影响相对较小,因此国外大多数AUV对接技术都采用超短基线(USBL)作为其主要对接导航定位方式。如美军使用最广泛的水下无人航行器-REMUS AUV就采用了高精度数字式USBL作为其对接传感器(图5)。该型USBL模块布置于AUV头部,对接引导距离达到3000 m,分辨力小于0.5º。美海军多次海试表明,REMUS AUV在超短基线的引导下能从几海里外,准确地进入直径仅为80 cm的锥形导向罩内,单次对接成功率达到60%[3]。

图5 REMUS头部USBL基阵
2.2 光学传感器
光学传感器在AUV对接技术中的使用有其独特的优势与特点,其近距离探测精度能达到厘米级,特别适用于入口较小的对接装置,例如AUV鱼雷管回收。但是光学传感器受到海水清晰度的影响很大,有效作用距离很近(小于30 m),一般均要与声学传感器(USBL)配合使用。目前基于视觉感知的AUV对接技术尚处于研制阶段,例如韩国研究机构正在研究鱼雷型AUV与锥形对接装置的视觉导航接驳技术,如图6所示[6]。
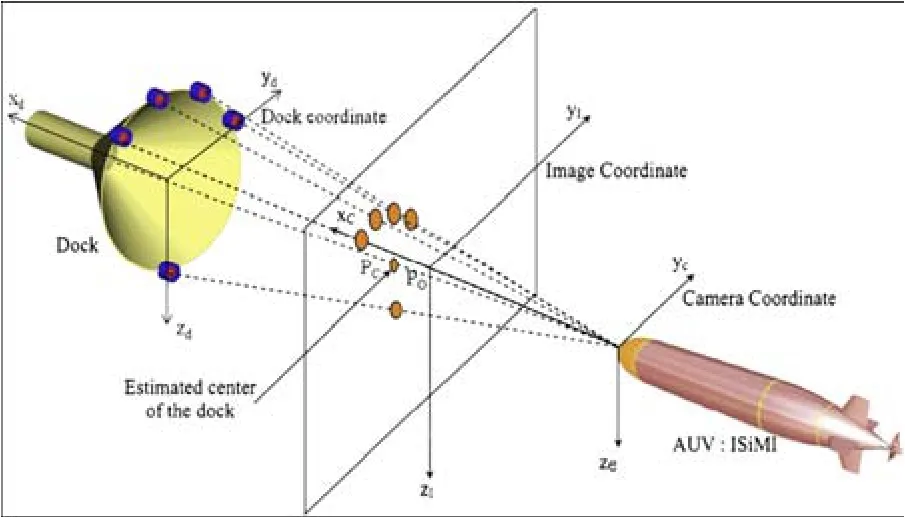
图6“ISiMI”AUV光学导向装置
整个视觉导引装置包含五盏信标灯(布置于锥形入口处)、CCD摄像机(AUV头部)以及信号处理DSP,作用距离10~15 m,通过图像处理来识别信标光源,从而计算出对接装置的距离和中心位置,并结合视觉伺服控制算法引导AUV进入对接口。
2.3 电磁传感器
早在1990年代中期,美国MIT Sea Grant Program Odyssey AUV就设计了基于电磁场导航的对接装置[7]。电磁传感器克服了光学传感器的易受干扰的缺点,且对接精度也较高。1996年在Buzzards湾的试验表明,该电磁导航系统的有效作用距离为25~30 m,对接精度为小于20 cm。但是由于技术较复杂、传感器尺寸较大、需要与USBL配合使用等因素使其与光学传感器一样,在AUV对接导航中的使用较少。
3 接驳控制技术
AUV对接过程中的控制技术就是根据AUV的操纵性能、采取的对接形式、对接传感器的种类、对接目标的位置以及海洋环境等因素,制定出AUV合理的对接航行策略,规划出最佳路径,最后根据航行策略选取某种控制算法实现AUV水下对接。
无论是美国的REMUS AUV对接系统还是MBARI研究所开发的Bluefin AUV水下对接系统,都采用了类似的航行策略,即将接驳过程分为两个阶段:回归航行阶段和精确接驳阶段(图7),各阶段的详细对接流程如图8所示[4]。

图7 AUV接驳过程控制路径示意图
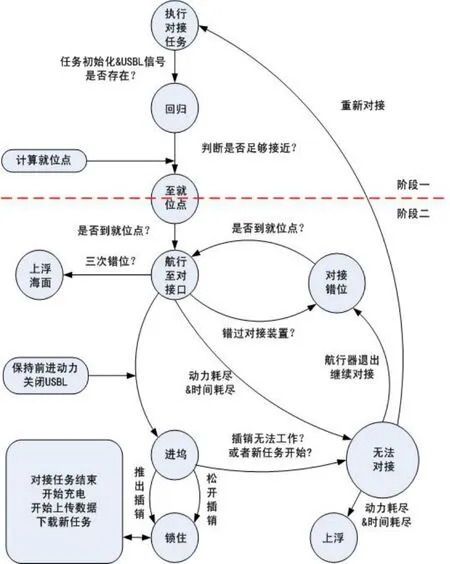
图8 AUV对接控制流程示意图
3.1 回归航行阶段控制
AUV自主航行至USBL信号覆盖范围以内,采用追踪制导方式接近对接装置,过程中调整AUV,使其始终朝向USBL信号方向,以保持可以得到最大信号强度。当USBL信号强度足够时,AUV利用自身罗盘、USBL测向和测距信息来计算就位点(接驳装置中心轴延长线上的一点),并驶向该就位点。
3.2 精确接驳阶段控制
AUV到达就位点后,沿接驳装置轴线向接驳装置靠近。此时控制方式不再采用追踪制导方式,而是采用沿固定路线前进的控制方式,并且AUV在距接驳装置200~100 m远的地方进行减速,为控制层提供足够的时间去消除航向超调量,并降低接驳撞击力。该种控制方式要求AUV沿着固定路线接近接驳装置,需要对以下方面展开研究:海流对航向产生的影响;USBL数据刷新期间的AUV航迹推算及误差消除。
此外,对接失误策略也是AUV对接控制技术的必要部分。当AUV没有对接成功,应根据AUV与对接目标间的通信来确认,并采取对接失误策略,重新开始接驳。
4 接驳传输技术
AUV水下对接技术的最终目的就是实现AUV的能源补充(充电)、任务下载、探测数据上传等功能。要实现这些功能,对接系统必须有可靠、高效的水下能量、信息传输装置。目前,AUV与对接装置间的传输技术可以分为两大类:接触式插拔传输和非接触式感应传输。
4.1 接触式插拔传输技术
接触式插拔传输方式具有原理结构简单、传输稳定高效的特点。一旦连接成功,传输过程几乎不受任何海洋环境的影响。但是在深海、无人工操纵的条件下能准确、牢固地完成一般的水密连接器插拔十分困难。为此,实现接触式插拔传输技术的关键在于具有特殊功能的水密电连接器与配套的插拔动力装置。该套系统需要具备自动导向对正、便捷锁紧与松开、不受海水压力影响的带水湿插拔能力。图9为REMUS AUV对接系统采用的插拔机构及其原理图[3]。
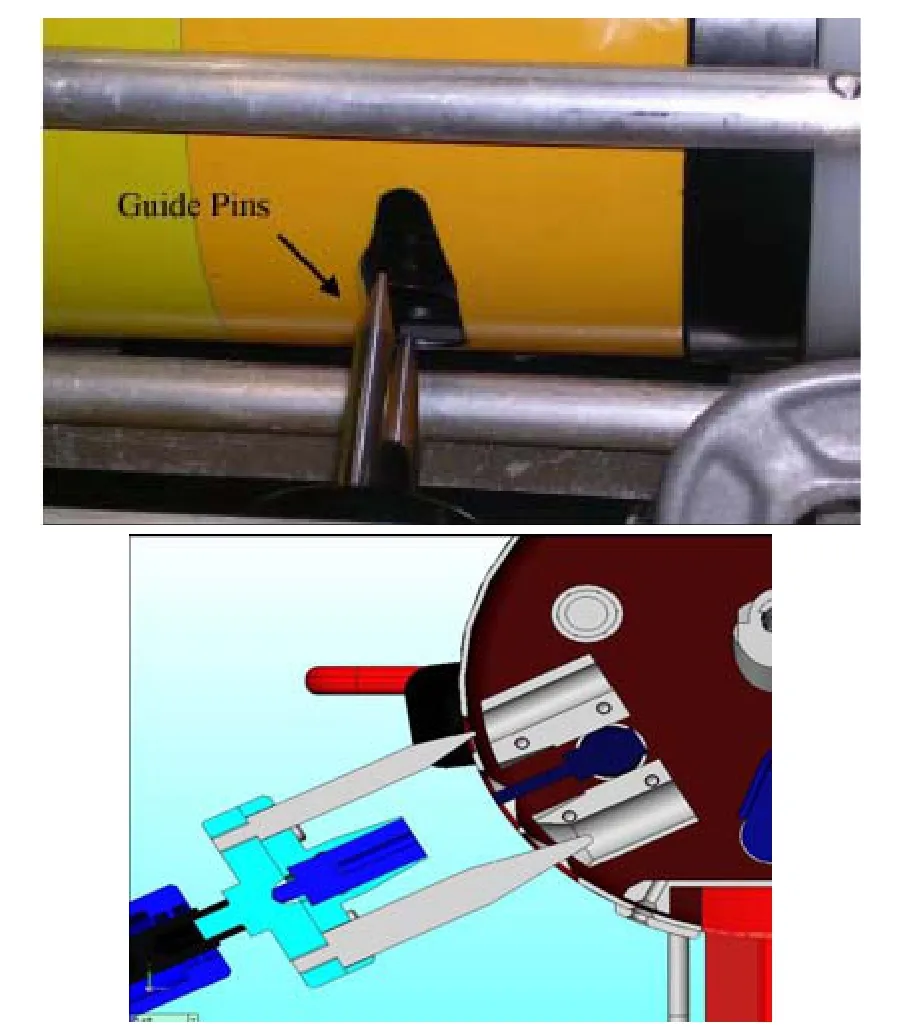
图9 REMUS AUV插拔机构原理图
4.2 非接触式感应传输
与接触式插拔传输方式相比,非接触式感应传输可以做到对海水的完全可靠密封,不存在海水腐蚀连接器和精确对准等一些问题。但其主要缺点是能量传输效率较低,美国Florida Atlantic University 为AUV水下对接开发的电磁充能系统总效率也仅为48%[4]。此外,由于数据传输使用的是无线电磁波方式,容易受到外界干扰而不稳定。图10为国外某AUV水下对接装置使用的感应传输器件。

图10 AUV对接感应传输器件
5 总结
AUV水下对接技术是AUV能源补充、信息交换的关键技术,未来无论在民用领域,如海洋探测、科学考察,还是军用领域,如水下无人作战网络、AUV反潜(反水雷)战均有广泛的应用价值。随着AUV水下对接技术的不断发展,将会对未来AUV的使用理念、使用方式带来深远的影响。
[1]燕奎臣,吴利红. AUV水下对接关键技术研究[J]. 机器人, 2007,29(3):267-273.
[2] HANUMANT SINGH , JAMES G BELLINGHAM , FRANZ HOVER , et al. Docking for an autonomous ocean samplingnetwork[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4):498-514.
[3] BEN ALLEN, TOM AUSTIN, NED FORRESTER , et al. Autonomous docking demonstrations with enhanced REMUS technology[J]. OCEANS , 2006, 18-21:1- 6.
[4] ROBERT S MCEWEN, BRETT W.HOBSON, LANCE MCBRIDE, et al. Docking control system for a 54-cm-diameter(21-in) AUV[J]. IEEE Journal of OceanicEngineering, 2008, 33(4): 550-562.
[5] KAWASAKI T, NOGUCHI T, FUKASAWA T, et al. "Marine Bird", a new experimental AUV - results of docking and electric power supply tests in sea trials[C]. OCEANS’04 MTS/IEEE TECHNO-OCEAN’04, 2004, 3:1738-1744.
[6] JIN-YEONG PARK, BONG-HUAN JUN, PAN-MOOK LEE, et al. Experiment on underwater docking of an autonomous underwater vehicle ‘ISiMI' using optical terminal guidance[C]. OCEANS-Europe, 2007:18-21.
[7] MICHAEL D FEEZOR, PAUL R BLANKINSHIP, JAMES G BELLINGHAM, et al. Autonomous underwater vehicle homing/docking via electromagnetic guidance[J]. IEEE Journal of Oceanic Engineering,2001,26(4):515-521.
