基于神经网络和冗余技术的传感器检测系统
2013-07-05雷云涛
雷云涛
(天津职业技术师范大学,天津 300222)
基于神经网络和冗余技术的传感器检测系统
雷云涛
(天津职业技术师范大学,天津 300222)
将神经网络与传感器硬件冗余技术相结合应用于工业传感器在线检测系统,提出一种新的传感器在线故障诊断与分离方法。基于神经网络的传感器检测系统由3层BP神经网络构成融合单元,3个传感器对同一物理量检测数据信息融合,预测单元根据传感器当前时刻和前一时刻的输出值预测下一时刻的输出值,多种算法支持的决策单元得出最为合理的信号输出,并给出了信号重构技术算法。特别适用于检测过程控制系统中的关键参数,解决因各种工业传感器性能变差、损坏以及短时更换等引起的问题,实现控制系统的持续运行。实际应用表明,该系统的工程化设计有效地提高了整个自动控制系统的稳定性和可靠性。
传感器;硬件冗余;神经网络;故障诊断
现代自动化生产过程中,需要采用各种传感器来监视和控制生产过程中的各个参数,保证设备正常运行于最佳状态。若传感器发生故障而没有及时进行处理,会给生产造成极其严重的后果。此外,传感器寿命是有限的,在正常工作情况下也需要定期更换。在一些特殊场合,更换传感器时系统还必须保持运行。
目前,故障诊断方法分为基于解析数学模型的方法和不依赖于数学模型的方法[1]。基于模型的传感器故障诊断系统要求建立一套准确的传感器数学模型[2],这在实际工程中实现起来较为困难。因此传感器故障诊断方法大多基于分析冗余技术[3]、神经网络等,为此,本文采用BP神经网络,以传感器当前时刻的输出作为网络的输入信号,计算出相应传感器下一时刻的预测值,既提高了系统监控精度,又解决了更换和维修时系统的稳定性问题。
本文采用硬件冗余技术与神经网络进行配合的方法,既有传统设计中硬件冗余的特点,又可保证信号输出的稳定性和准确性。
实际设计中,依据经济性原则采用了以下方法。
(1)对于模拟传感器,同时安装3个传感器进行检测;对于现场总线传感器,采用现场总线网络连接3个传感器,并结合网络信号进行检测。
(2)在系统稳定运行时,采用神经网络算法对传感器信号进行融合,然后进行传感器的故障分离,最后通过信号重构技术实现信号的稳定输出。
本文的研究工作能够实现传感器出现故障时故障信号的在线分离,以便于在较短时间内完成传感器在线更换工作。
1 基于神经网络的传感器检测系统
系统采用3个传感器同时进行检测,基于神经网络的传感器检测系统构成如图1所示。融合单元采用3层BP网络,对传感器输出数据进行融合;预测单元采用预测能力较强的递推网络,为决策单元提供传感器故障诊断的标准;决策单元根据系统当前状态作出决策,并为控制器或监控器提供输入信号。
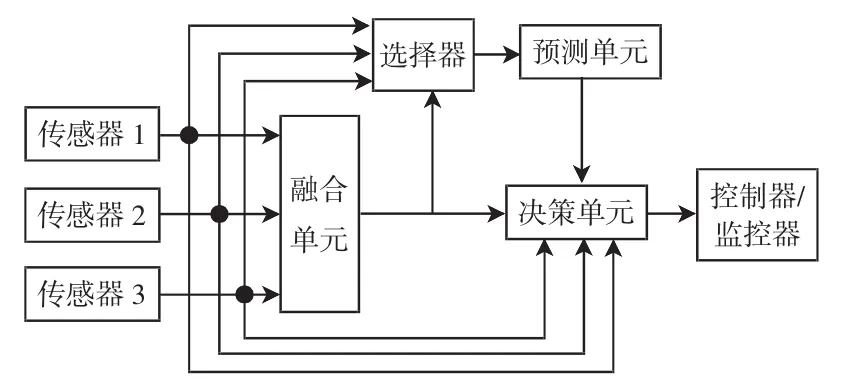
图1 基于神经网络的传感器检测系统结构Fig.1Structure of sensor detection system based on neural network
1.1 融合单元
实际应用中,系统内部各参数之间存在一些耦合信息,这些信息通过神经网络,能实现多个传感器对同一物理量检测数据的信息融合,获得比其中任一传感器所检测到的数据都精确的数据[4]。
设系统中某一物理量输出的标定值为y,对应3个传感器检测该物理量的输出值为y1、y2和y3,则y可以用一个三次拟合方程来描述,即
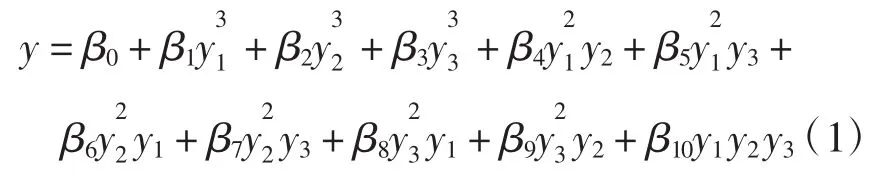
式中,β0,β1,…,β10为待定常数。
当3个传感器正常工作时,只要确定了这些待定常数,由式(1)就可以拟合出输出值y。为了确定这些待定常数,设计中采用了3层BP神经网络。在系统投入使用前,使用足够的样本对此网络进行训练,就可以逼近任一非线性函数。3层BP神经网络具有高速并行处理能力,结构如图2所示。当3个传感器中任何一个出现故障时,应该由决策单元根据分析描述的方法进行处理。
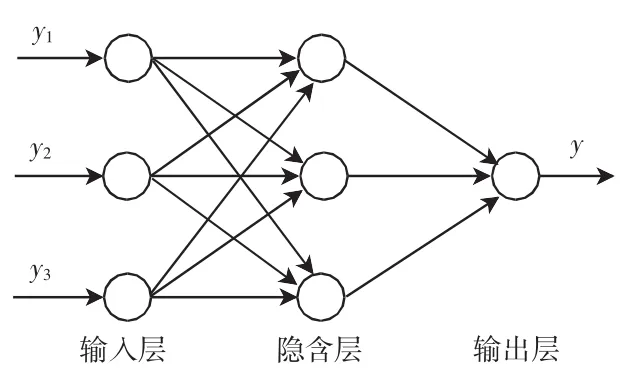
图2 BP神经网络结构图Fig.2Structure of BP neural network
1.2 预测单元
传感器故障检测是实现传感器冗余控制的基础,只有将传感器故障及时检测出来,并进行隔离,才能有效地实现冗余控制[5]。所谓传感器故障检测就是判断传感器的输出值是否在正常的范围内,当超出允许范围时,则视为故障信号。要判定传感器的输出值是否在正常的运行范围内,必须提供一个评判标准。比较有效的办法是用传感器当前时刻和前一时刻的输出值预测下一时刻的输出值,并把这一输出值作为下一时刻的评判标准。
1.3 决策单元
一般的模拟传感器输出4~20 mA电流信号。目前多采用双冗余或者3个传感器冗余的方法。选择具有3个测量值的输入选择器,进行选择判断,然后将决策结果送到控制调节器(一般是PID调节器)。
本文设计的选择器,其算法支持多种方式,包括:取3个输入值中的最高值、最低值或中间值,或者计算出的三者平均值。现场总线传感器不仅提供测量数值,还提供状态信息,它有助于自动判定测量值的好、差或不定。在控制调节器接收数据之前,需对信号不稳定的数据进行屏蔽。
设3个传感器在某时刻的输出值为y1(k)、y2(k)和y3(k),融合单元的输出值为y123(k),前一时刻预测单元的输出值为y(k-1),两个传感器之间的允许的最大误差范围为Δmax,则判断公式[6]为
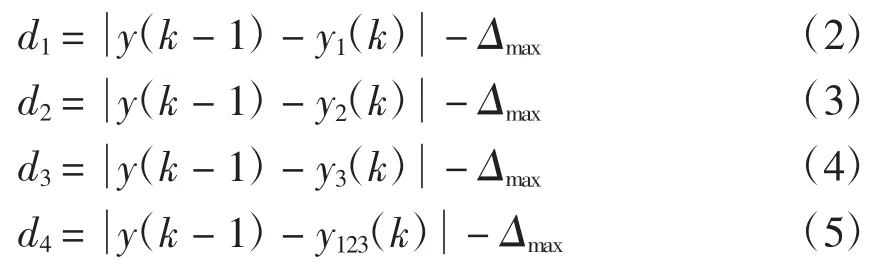
当yn(k)=0(n=1,2,3)时,表示对应传感器的信号线断路;当yn(k)(n=1,2,3)大于量程值时,表示信号超量程;当yn(k)(n=1,2,3)大于零,小于量程值时:
(1)若dm〈0(m=1,2,3,4),表示信号合理;
(2)若dm=0(m=1,2,3,4),表示信号不变化;
(3)若dm〉0(m=1,2,3,4),表示信号变化过快。
决策方法如下。
(1)首先判定信号是否合理,根据yn(k)和dm的值,区分断开、超量程、不变化和过快变化4种情况。在系统不断开的情况下,若信号都不合理,则对预测值进行重新估算。
(2)若出现3个合理值时,则丢弃一个与平均值偏差比较大的传感器信息,余下两个测量值按图3所示的算法进行处理。
(3)按照模式设置,进行最大值、最小值、平均值计算。
(4)按照模式设置,可选择信号质量最好的信号,或者加权平均。
决策单元的模式设置见表1,算法流程如图3所示。
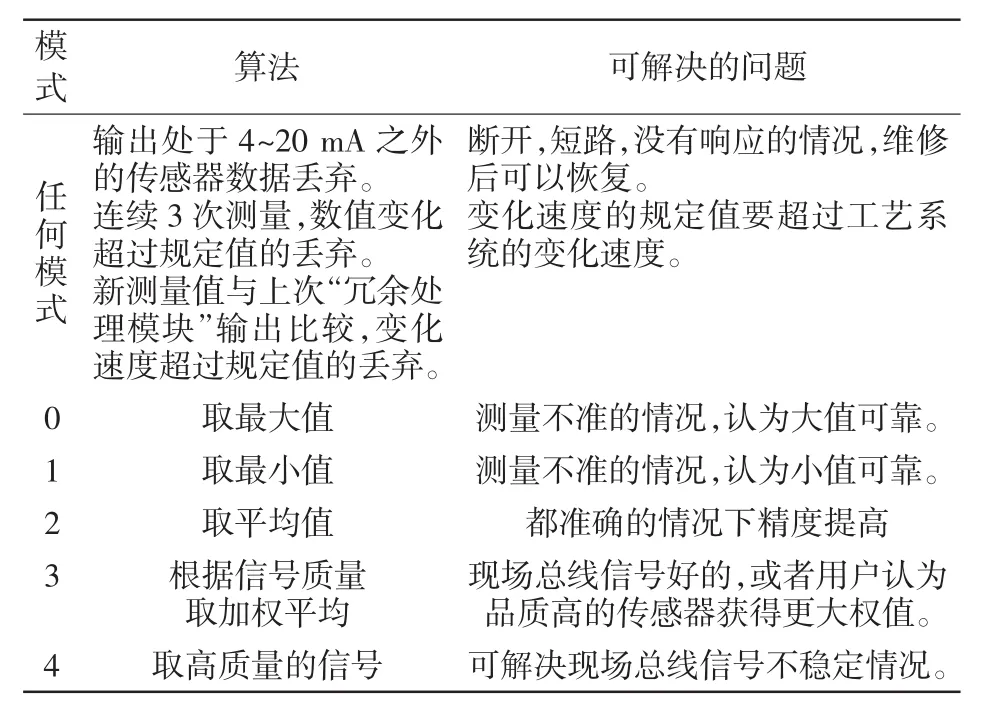
表1 决策单元的模式设置Tab.1Mode setting of decision-making unit
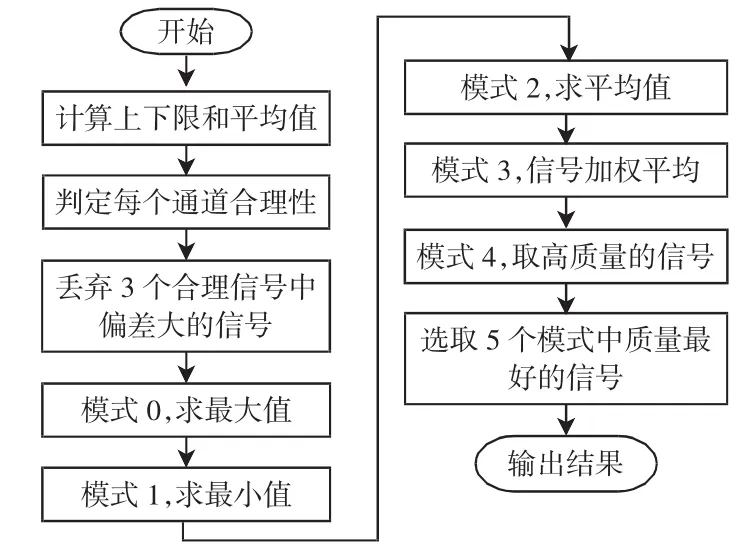
图3 决策单元算法流程Fig.3Flow chart of decision-making unit algorithm
例如第1个液位传感器质量输入为90%(良好),第2个为30%,第3个为10%,若选择模式为多选一模式,则检测后只输出90%的传感器数据;若选择模式为加权模式,则根据信号质量,质量高的数据就占有较大的权值。
2 信号重构技术
很多学者对各种非线性传感器进行了研究,采用多种方法进行信号处理、模型重建,以便获得高精度、高稳定的检测信号[7]。在实际应用中,其主要目的不是获得高精度,而是为了当传感器出现问题时在保持系统正常运行状态下进行信号的重构。信号重构可以直接在单一的传感器上进行,也可在传感器冗余的基础上完成。
信号重构技术要求每个模式都设定容许的重构时间,具体实施方法按表2设定模式操作。
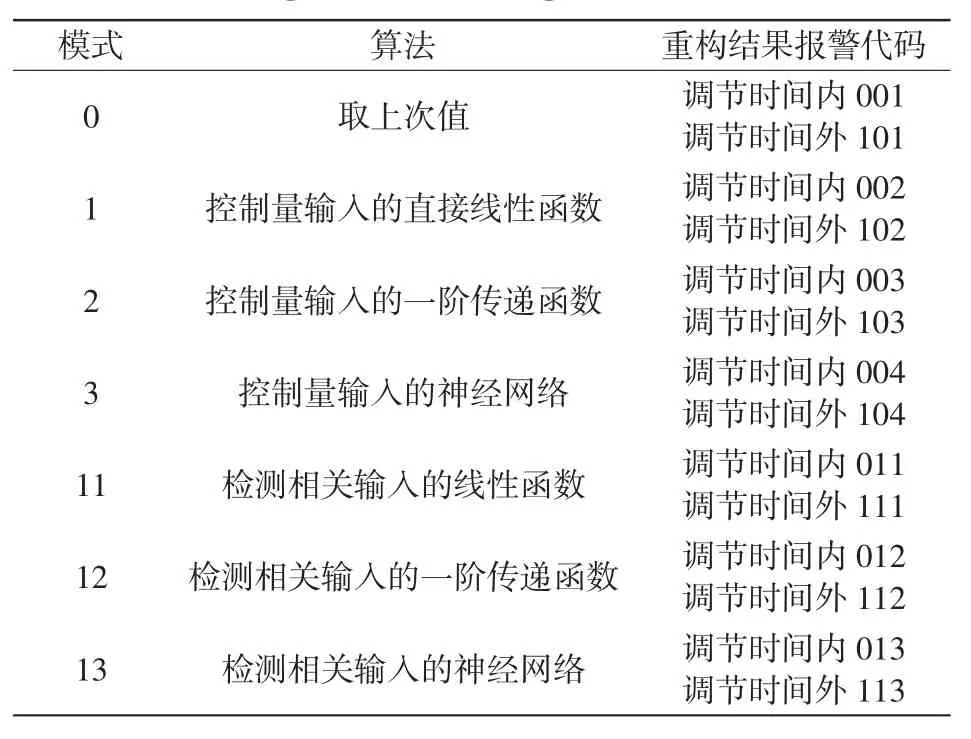
表2 信号重构算法Tab.2Algorithm of the signal reconstruction
(1)直接替换数据法:仅由某个传感器获得现场相关信息,在系统处于稳定状态下,直接使用最后一个合理数据代替新的输出。
(2)函数计算法:由某个传感器获得现场相关信息,利用已知的系统传递函数在规定的时间内将计算值和真实值进行比较。如果误差在允许范围内,则使用函数计算值作为新的输出。
若系统传递函数未知,但有其他相关传感器,其检测到的信息与目标检测信息具有固定的函数关系,则可利用这个函数关系按照上述方法进行计算,获取输出值作为新的输出。
(3)采用神经网络算法:采用传感器融合技术,将融合单元的输出作为合理数据直接代替新的输出。但在进行融合之前,需要判断信号所属的状态(合理、断开、超量程或变化过快)。
程序设计采用线性函数(或一阶传递函数)和BP神经网络。对于液位控制,温度控制等具有惯性环节特性的情况,可采用一阶传递函数,其它情况采用BP神经网络。
信号重构技术的算法流程如图4所示。
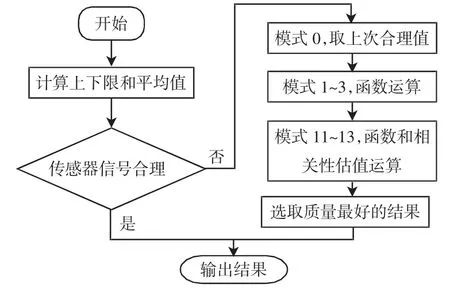
图4 信号重构技术算法流程Fig.4Flow chart of signal reconstruction
3 应用测试
本设计实际应用于某生化反应温度控制中并进行了可靠性、稳定性和准确性测试。在规定的测试环境下采用3个传感器对系统的输出温度进行实时检测,在200 s内温度由20℃升到50℃过程中,系统的实际输出曲线如图5所示。当传感器1和传感器2出现故障,以及传感器1和传感器2同时出现故障时,融合单元输出曲线如图6所示。预测单元输出曲线如图7所示。
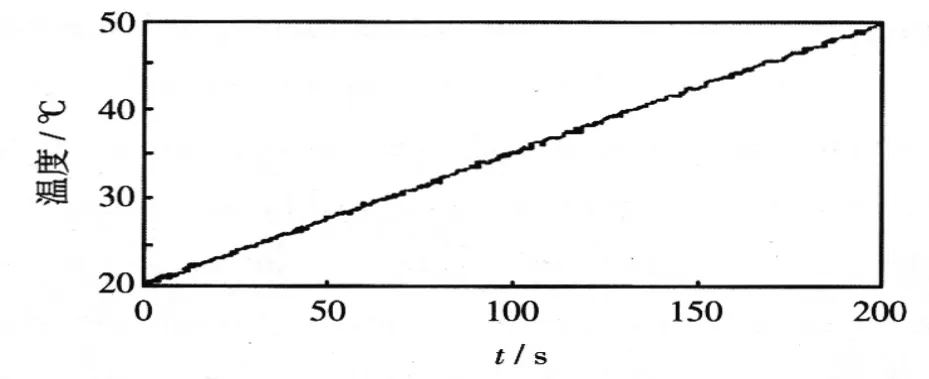
图5 系统实际输出曲线Fig.5Output curve of actual system
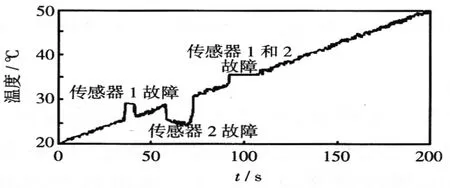
图6 融合单元输出曲线Fig.6Output curve of fusion unit
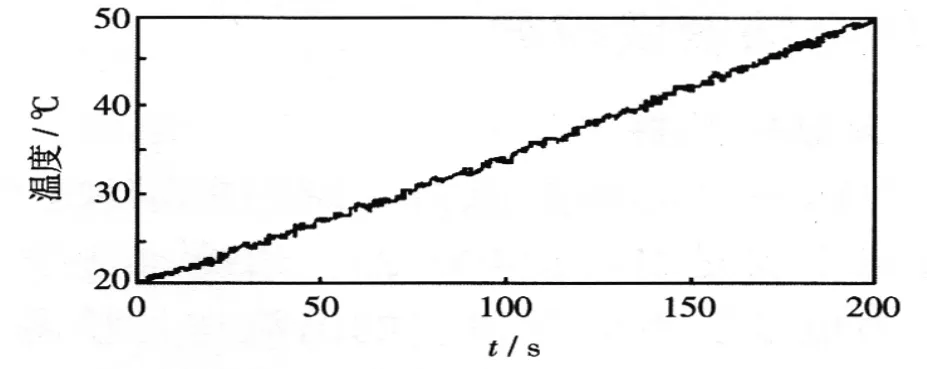
图7 预测单元输出曲线Fig.7Output curve of predict unit
4 结语
本文采用神经网络技术、传感器冗余技术和信号重构技术完整的设计实践了一套新颖实用的传感器在线检测与更换方法,应用于锅炉液位控制系统中收到了良好的效果。对于运行中的自控系统传感器的工作状态和系统的关键性参数的检测以及传感器的在线更换有较好的实用价值。也可广泛应用于电力系统和自动化设备的在线检测与维护。
[1]Venkatasubramanian V,Rengaswamy R,Yin K,et al.A review of process fault detection and diagnosis:part III:process history based methods[J].Computers and Chemical Engineering,2003;27(3):327-346.
[2]Lee S C.Sensor value validation based on systematic exploration of the sensor redundancy for fault diagnosis KBS [J].IEEE Transaction on System,Man and Cybernetics,1994,24(4):594-605.
[3]Willsky A S.A survey of design methods for failure detection in dynamic systems[J].Automatica,1976,12(6):601-611.
[4]王永骥,涂建.神经元网络控制[M].北京:机械工业出版社,1998.
[5]杨国胜,谢东亮,侯朝桢(Yang Guosheng,Xie Dongliang,Hou Chaozhen).基于神经网络的传感器冗余方法研究(Research on the redundant method for sensors based-on neural network)[J].传感技术学报(Journal of Transduction Technology),2001,14(1):33-38.
[6]崔克宁,谢东亮(Cui Kening,Xie Dongliang).一种多传感器冗余的神经网络算法研究(Research on algorithm of multi-sensor redundance based on neural network)[J].河南大学学报:自然科学版(Journal of Henan University:Natural Science),2001,31(1):15-19.
[7]徐涛(Xu Tao).基于小波包PCA的故障传感器数据重构方法(Data reconstruction method for faulty sensor based on wavelet package and PCA)[J].计算机工程与应用(Computer Engineering and Applications),2008,44(14):239-241.
Sensor Detecting System Based on Neural Networks and Redundancy
LEI Yun-tao
(Tianjin University of Technology and Education,Tianjin 300222,China)
Combining the hardware redundant technology and BP neural network,this paper presents a new method for constructing a sensor detecting system with abilities of sensor fault detection,fault isolation and redundancy.It introduce the structure of the sensor detecting system based in neural networks.The fusion unit constituted with 3-lays BP neural networks can complete the information fusion which the same physical quantity is detected by three sensors,the predict unit forecast the output value in the next time with the former value.The decision-making unit support many algorithm that can output the most reasonable signal output.It also gives the algorithm of the signal reconstruction.This method especially suits for the key parameter in PA system,which can solve the problem of short-term replacement in some case like as,the deterioration of the sensor,even damage,and it can't affect the normal production to continue the operation of control system.The results of experiment show that the method is correct and reliable in automatic control system.
sensor;hardware redundancy;neural network;fault diagnosis
TP206
A
1003-8930(2013)03-0158-04
雷云涛(1962—),男,本科,副教授,研究方向为智能检测、传感器网络和信息处理。Email:lyt_tj@163.com
2012-12-10;
2013-01-22
