基于扩展状态观测器的交流伺服电机精确速度控制*
2013-07-02程国卿胡金高
程国卿胡金高
(1.厦门大学嘉庚学院物流管理系 2.福州大学电气工程与自动化学院)
基于扩展状态观测器的交流伺服电机精确速度控制*
程国卿1胡金高2
(1.厦门大学嘉庚学院物流管理系 2.福州大学电气工程与自动化学院)
提出一种交流电机伺服系统的转速控制方案,在未知负载条件下可实现速度的准确调节。基于永磁同步电机伺服系统中位置与速度环组成的数学模型,以电机转角位置作为系统的测量反馈信号,设计一个扩展状态观测器对系统转速(未量测)和未知负载扰动加以估计,并用于控制和补偿。从理论上分析了速度控制系统的渐近稳定性。最后进行了MATLAB仿真和基于TMS320F2812DSP的实验测试,结果表明伺服系统能在扰动情况下实现平稳和准确的目标转速跟踪。
永磁同步电机;观测器;扰动;调速
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)由于功率密度高、结构简单可靠等优点,在高性能位置/速度伺服系统中得到了广泛的应用[1-2]。常规的PMSM伺服系统采用多环串级PID控制结构。但PID是一种单自由度的线性控制技术[3],在限定的闭环带宽下不能同时兼顾系统响应的快速性与低超调,且易产生积分器饱和现象。PID控制系统的瞬态性能对给定输入和扰动的变化缺乏鲁棒性,实际应用中经常需引入非线性增益[4]、抗饱和等措施[5-6]。文献[7]提出自抗扰控制(active disturbance rejection control, ADRC),利用非线性扩展状态观测器提取扰动信号并加以补偿,采用非线性PID控制律改进系统响应性能[8]。ADRC控制律的设计参数众多,且与系统性能的关系不明朗,这在工程应用中非常麻烦;另外,ADRC的闭环稳定性分析尚未解决。
本文针对PMSM转速伺服系统的模型特点和性能需求,提出一种基于观测器的控制设计方案。鉴于典型的伺服电机采用增量式光电编码器提供转角位置的测量信号,而速度传感器由于成本和维护的问题通常不安装,因此需要根据位置信号估算速度。常用的M法(频率法)、T法(周期法)和M/T法得到的转速信号只是一个区间的平均速度,而不是瞬时速度,其相位滞后会降低控制系统的性能。本文从电机的数学模型出发,设计一个线性扩展状态观测器估计系统的转速和未知扰动(包括不确定性和负载转矩等因素),并加以补偿,最终实现平稳和准确的速度控制。通过MATLAB仿真和硬件实验测试,验证了控制方案的有效性。
1 PMSM伺服系统的数学模型
常用的面装式永磁同步电机的数学模型为:
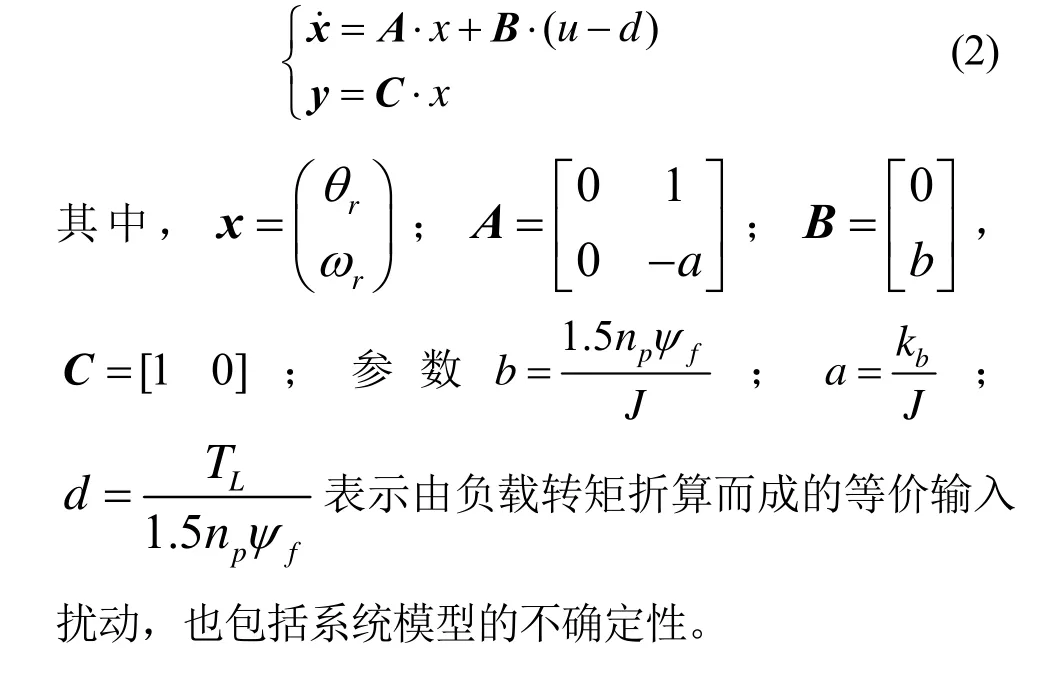
其中,rθ为机械转角;rω为机械角速度;Te为电磁转矩;TL为负载转矩;J为电机轴惯量;kb为粘性摩擦系数;Ld、Lq为电机直轴和交轴同步电感;Rs为定子电阻;np为极对数;fψ为永磁体磁链;ud、 uq分别是dq坐标系中d、q轴的电压;id、iq分别为直轴和交轴电流,即励磁电流和转矩电流。
本文电流环的控制沿用常规的PID控制方式,而对电机速度和位置环则合在一起作为一个机械子系统进行考虑:以电机转角θr和转速ωr作为系统的状态变量,其中θr是可量测的输出量,转速ωr为受控变量,交轴电流iq作为控制输入量u(其值将作为电流环的给定信号),则可得到式(2):
2 基于扩展状态观测器的速度控制律
本文针对式(2)所描述的伺服系统模型,设计一种可以实现准确速度调节的控制律。为进行电机的速度控制,需要得到转速信号。常规的PMSM系统通过一个光电编码器测量转角的信号,而转速信号则利用M法、T法或M/T法计算。M法适用于转速大的情况,T法适用于小转速的情况,而M/T法则能在宽转速范围内工作,但M/T法的实现比较困难。这里利用PMSM的数学模型,采用观测器技术,根据可量测的转角位置信号,构造出转速信号和负载扰动信号,在此基础上设计转速控制律。
由于负载扰动是常值或阶跃变化的,可用微分方程描述为d˙=0。把这个方程结合到式(2)中,得到增广后的模型为:

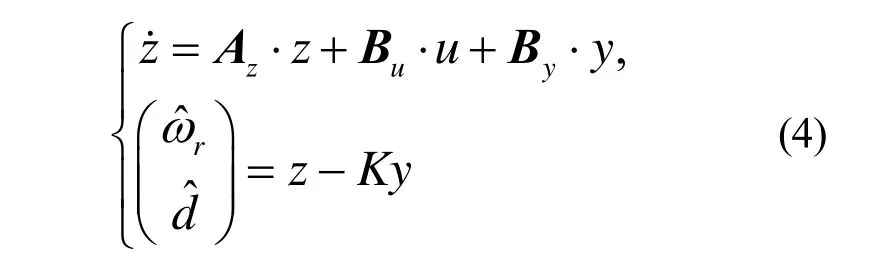
注意到转角rθ(即输出y)是已知的测量值,只需估计转速rω和扰动d的值,因而可以采用二阶降阶观测器估计,其对应的观测器方程为:
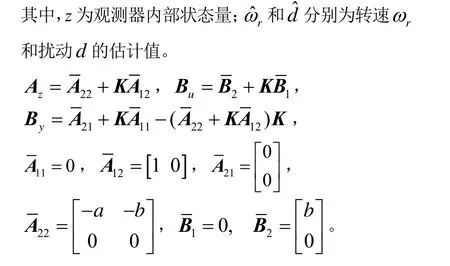
增益矩阵K应使矩阵Az的特征值落在期望的稳定区域。如果选择让Az的特征值具有阻尼系数0ζ和自然频率0ω,则可推出:
选取一个2×2正定对称矩阵Q,并求解如下Lyapunov方程:

3 仿真与实验测试

图1 永磁同步电机伺服系统实验装置
首先在MATLAB中进行仿真研究,利用SimPowerSystems的PMSM模块作为永磁同步电机的仿真模型。目标转速设为1200 r/min(换算为40π =rad/s);负载转矩TL初始值为0,在0.4秒时变为0.2 Nm。仿真结果如图2所示。
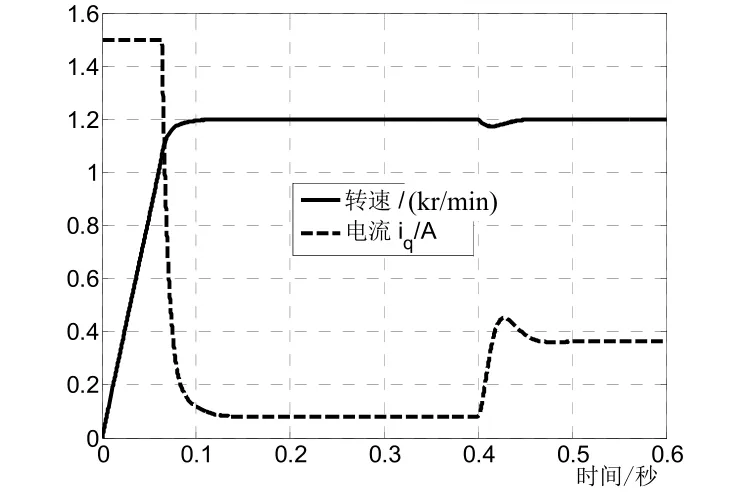
图2 仿真结果
由图2可知,系统对给定的目标速度,能实现快速平稳且准确的跟踪,在负载转矩跳变后能很快恢复本来的速度,即负载扰动的影响受到了有效的抑制。
采用TM320F2812DSP作为电机控制的主芯片,通过C语言编程实现所设计的控制律,选取速度控制环的采样周期T=0.002 s。电流环采用带有抗饱和反馈回路的离散PID控制律(采样频率为20 kHz)已实现了闭环控制,电流环的响应时间约为1 ms,因而在设计速度控制环的时候可以忽略电流环的影响。在Code Composer Studio集成开发环境中进行实时实验,采集的数据转换到MATLAB进行绘图。分别在电机空载(但系统仍存在其它未知扰动)和40%额定负载转矩情况下对目标转速1200 r/min进行跟踪控制,结果如图3和图4所示。

图3 实验结果(空载)

图4 实验结果(40%额定负载)
图3、图4中分别给出了电机转速(换算为kr/min,即:千转/分)、控制电流(iq给定)和扰动估值的波形。可以看出系统均能平稳且准确地到达目标转速,控制性能在不同负载时没有明显差别。实验结果与仿真结果基本一致。综合起来,本文的控制律能在各种负载扰动情况下对目标转速实现平稳且准确的跟踪。
4 结语
本文提出一种在交流伺服电机上实现准确速度调节的控制方案。采用扩展状态观测器技术,从电机的位置测量信号中估计出转速和未知负载扰动信号,以实现反馈控制和扰动补偿。基于Lyapunov稳定性理论分析了速度伺服系统的渐近稳定性,进行了MATLAB仿真,并采用TMS320F2812DSP在实际的永磁同步电机上进行了实验测试。结果表明提出的控制方案可在各种负载条件下实现平稳和准确的速度伺服控制。控制器采用全参数化设计,可以方便地推广应用于相关领域的伺服控制系统。
[1] 方斯琛,周波,黄佳佳,等.滑模控制永磁同步电机调速系统[J].电工技术学报,2008,23(8):29-35.
[2] 刘颖,周波,方斯琛.基于新型扰动观测器的永磁同步电机滑模控制[J].中国电机工程学报,2010,30(9):80-85.
[3] Ang K H, Chong G, Li Y. PID control system analysis, design, and technology[J]. IEEE Transactions on Control Systems Technology,2005,13(4):559-576.
[4] Heertjes M, Schuurbiers X, Nijmeijer H. Performanceimproved design of N-PID controlled motion systems with applications to wafer stages[J].IEEE Transactions on Industrial Electronics, 2009,56(5):1347-1355.
[5] Choi J W, Lee S C. Anti-windup strategy for PI-type speed controller[J]. IEEE Transactions on Industrial Electronics, 2009,56(6):2039-2046.
[6] 杨明,徐殿国,贵献国.永磁交流速度伺服系统抗饱和设计研究[J].中国电机工程学报, 2007,27(15):28-32.
[7] Han J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics,2009,56(3): 900-906.
[8] 滕福林,胡育文,李宏胜,等.基于自抗扰控制器的交流位置伺服系统[J].电气传动, 2011,41(11): 46-50,58.
Precise Speed Control of AC Servo Motor Based on Extended State Observer
Cheng Guoqing1Hu Jingao2
(1. Department of Logistics Management, Xiamen University Tan Kah Kee College 2. College of Electrical Engineering and Automation, Fuzhou University)
A control scheme is proposed to achieve accurate speed regulation in AC motor servo systems with unknown load disturbance. The scheme is based on the mathematical model of the position-speed loop in permanent magnet synchronous motor (PMSM) servo system, with the motor angular position as the only measurable feedback signal. An extended state observer is adopted to estimate the un-measured state (speed) and the unknown load disturbance for control and compensation. The asymptotic stability of the speed control system is analyzed theoretically. MATLAB simulation and experimental tests using the TMS320F2812 have been conducted, and the results verify that the servo system is capable of tracking the target speed smoothly and accurately in the face of load disturbance. The control scheme can be easily applied to relevant servo systems.
Permanent Magnet Synchronous Motor (PMSM); Observer; Disturbance; Speed Regulation
程国卿,男,1967年生,讲师,研究方向:工业与物流自动化、集成制造系统。
胡金高,男,1962年生,副教授,研究方向:智能信息处理与控制。E-mail: fzdx66@163.com