不同软件在ASTER数据中提取DEM的精度对比
2013-06-26何兆培
何兆培,杨 斌
(1.西南科技大学 环境与资源学院,四川 绵阳 621010)
数字高程模型(digital elevation models,简称DEM)是地表形态的数字化形式,具有广泛的应用潜力[1]。作为国家空间数据基础设施的框架数据之一,DEM生产技术已经比较成熟,如利用等高线地形图生产DEM技术、利用航摄像对生成DEM的数字化摄影测量方法等。随着航空遥感技术的不断发展,利用遥感影像提取DEM数据已成可能。
1 ASTER影像数据参数
ASTER影像数据主要应用在土地利用与覆盖、自然灾害、短期天气变动、水文等方面[2]。ASTER的DEM数据分为2种:相对DEM和绝对DEM。相对DEM不是地面控制点(GPC),而是参照影像中像素的最低点,通过卫星星历数据计算而得[3],精度范围为10~30 m;绝对DEM则是根据GCP而定,精度在 7 ~ 50 m[4]。
ASTER数据传感器VNIR(可见光近红外)子系统中有2个线性阵列的传感器,分别是星下点方向和后视方向,两者的夹角是27.7°,从而使得Band 3有2个数据——3N和3B。3B波段跟可见光近红外的3N波段形成立体像对,实现了立体观测,如表1所示。Band 3使用的是同步同轨道技术立体成像,即Band 3N位于地面上空拍摄后,卫星沿着轨道前进约1 min后,Band 3B对先前3N拍摄的地面进行拍摄,这样的拍摄方法可以得到基高比(摄影基线长度与摄站高度之比,B/H)为0.6的立体像对[5],如图1所示。
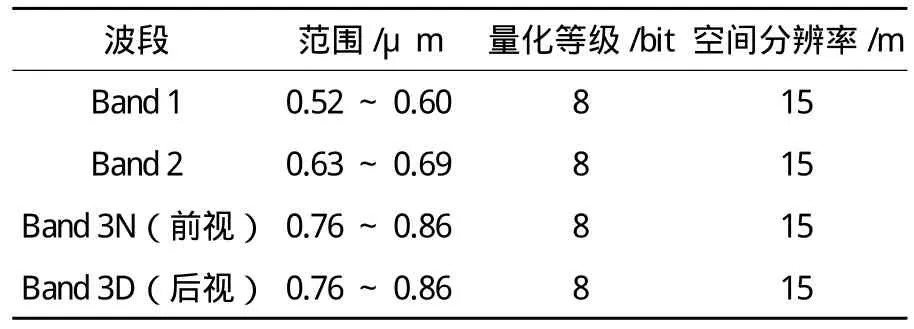
表1 ASTER的VNIR子系统参数统计表
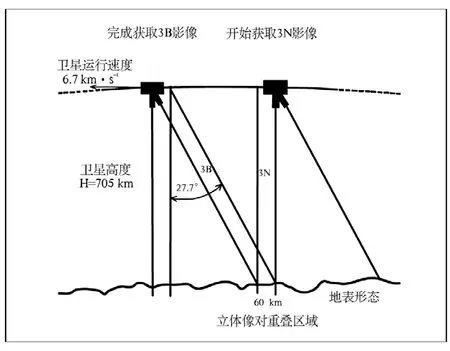
图1 ASTER的VNIR子系统同轨星下点与后视像对几何示意图
2 实验区概况及数据处理
2.1 实验区域概况
研究区域位于龙门山断裂带,地质构造复杂,断层、褶皱发育,构造对岩土体的改造强烈,同时岩性破碎,为地质灾害的发育提供了条件。本文的数据采用2003-03-19的ASTER L1B数据,其中心位置为(31.007 172°N,103.170 726°E),见图2,其范围覆盖龙门山中段、都江堰市、西岭雪山。该地区位于龙门山中段,地貌特征明显,平均海拔约为2 694 m。本实验使用L1B,是考虑到L1B数据已经对原始影像数据进行了几何校正和辐射定标校正,而且利用采样获取的GCP作辅助,可对生成的DEM进行几何精校正,从而提高DEM的质量。

图2 研究区域
2.2 数据处理
2.2.1 工作流程
实验数据分别由Exelis Visual Information Solutions公司开发的ENVI4.8图像处理软件、ERDAS公司开发的ERDAS IMAGINE 9.2图像处理软件、Atlantis公司开发的PCI图像处理软件进行处理对比,流程如图3所示。
图3中的数学模型是Toutin’s Model,该模型适合ASTER、QickBird、SPOT、JERS等遥感数据的处理,而匹配的方法为平均标准化相关法[6],地理坐标系统使用UTM投影和WGS84椭球体。对于ASTER影像来说,立体像对应使用前视影像作为左像,后视影像为右像,这是为了使得影像在重新投影时左右像拥有同一轨道方向,从而将2个影像配准到同一轴线上。
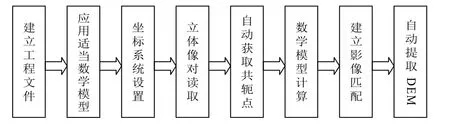
图3 DEM生成流程图
2.2.2 影像匹配
影像匹配,实质上是将立体像对上左像的点配准到右像上的共轭点,并获得高程信息的过程。传统的立体测图仪是通过人工在影像重叠区域进行共轭点匹配[6],而数字影像匹配是利用线性相关方程来判断立体像对的重叠区域,寻找共轭区域。本文采用的ASTER数据由于其传感器的2个摄像仪器具有同一轨道的特点,所以其重叠区域较大,便于提高DEM提取的精度。
根据匹配的方法可分为区域匹配、特征匹配、混合匹配及平均标准化相关法匹配4种。我们通常所采用的匹配方法为平均标准化相关法,此方法中的相关系数R(N,M)介于0与1之间,R越接近1,相关性越大,即为最佳位置。其数学模型为:

式中,Np、Mp为参考窗口矩阵(Np×Mp)的大小;p、s为参考窗口与搜索窗口内各元素灰度值为参考窗口与搜索窗口内所有像元的平均值;R(N,M)是相关系数。
立体像对必须配准到同一地点上。2幅图像中同一点的相对行列值为共轭点,共轭点均匀分布在工作区中。由于后视图像成像时会发生图像畸变,所以点位选取时,特别是水平方向需要密集和均匀,以减少图像畸变。共轭点的数量根据研究区域的复杂程度和面积来确定,一般至少为8个点[7]。
3 实例分析
3.1 DEM的生成
实验数据采用WGS84大地基准坐标系统和UTM投影坐标系统,实验区域位于该投影系统的北半球48分带。从软件上读取20个GCP点,见图4,使实验数据的误差控制在0.5个像元内,3个软件生成的DEM如图5所示。
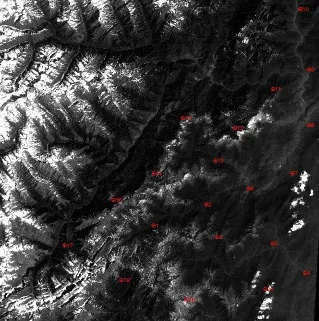
图4 20个控制点的位置示意图

图5 3个软件生成的DEM(ERDAS、ENVI、PCI)效果图
3.2 不同软件提取DEM的精度对比
精度分析采用的方法有3种:①检验点法,用已知的检验点与生成的DEM作对比;②剖面线法,在2张DEM中作相同位置的剖面线,然后以Y值作为高程值进行对比;③等高线回放法,即将2张等高线图进行叠加分析,考察其偏移的程度[8]。本文采用检验点法和剖面线法来分析DEM的精度。
3.2.1 检验点法
本研究先采用检验点法对提取的DEM进行精度检验,共有20个控制点。分别将3个软件生成的DEM进行对比,见表2。
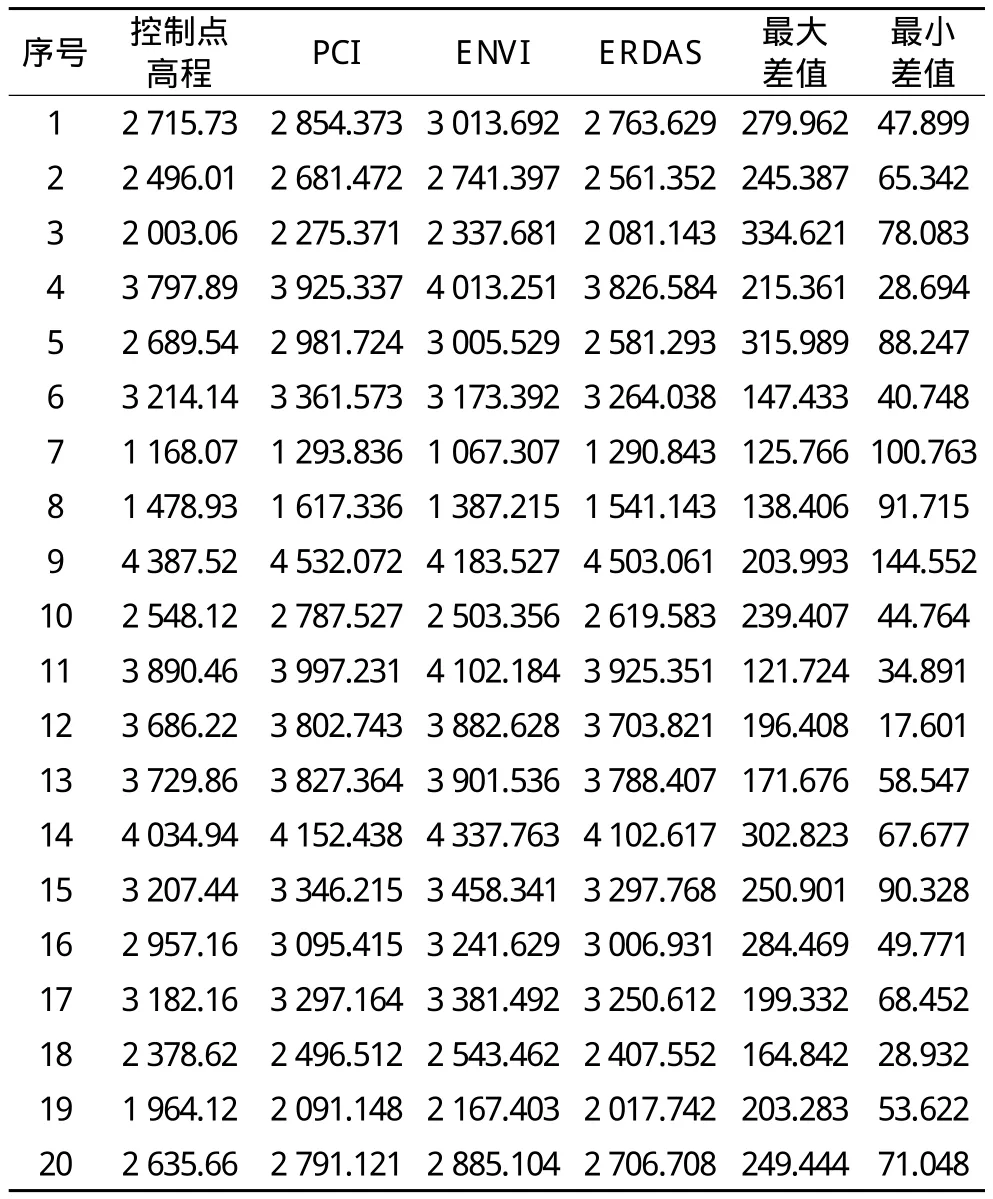
表2 检验点法精度分析统计表
从表2可以看出,PCI软件和ENVI软件生成的DEM精度差值都比较接近,但数据误差比ERDAS要大。这是因为PCI软件的OrthoEngine模块和ENVI软件的DEM Extraction模块都采用立体测量法提取高程数据,而ERDAS软件则具备了立体测量法和干涉测量法这2种方法。在本实验中,ERDAS软件是采用干涉测量法提取工程数据的。
干涉测量法是从2幅不同视点的图像获取覆盖同一区域的图像,再将2幅图像的相位相减,生成2幅图像的距离差值[9]。由于ASTER数据的Band 3N和Band 3B 2幅图像上其他相位影响因素基本上是相同的,相减后,就使这一部分值相互抵消,剩下2幅图像中记录的距离相位差,利用这些值再结合传感器的轨道信息就可以计算出每一个像元的高程值。ERDAS软件的Imagine IFSAS DEM模块就是利用干涉像对生成了精度较高的DEM数据。
3.2.2 剖面线法
为了进一步比较,对每一幅DEM数据作⑥号点A-B直线的剖面(见图6中红色直线的地形剖面图),所生成的高程剖面图如图7所示(横坐标表示地面距离、纵坐标表示高程值)。从图6中可以看出,由不同软件生成的DEM数据其高程值都存在偏移,直线的中点为地面控制点⑥,其高程值为3 214.14 m。ERDAS生成的DEM数据的高程值比较接近地面控制点⑥的值,但是离地面控制点越远,误差就越大。而PCI和ENVI软件都是采用相同的方法提取工程数据,所以它们的趋势都是比较相似的。而ERDAS生成的DEM,由于干涉测量方法需要把2张图相同的相位相减,从而减少了像元之间的影响。图中剖面线出现的“V”型,是由于高差间距的限制和地形地貌不能充分表达所致,可以通过增加GCP点的数量来改善,但是增加GCP点会降低DEM数据的生成速度,同时也会产生大量的冗余数据。
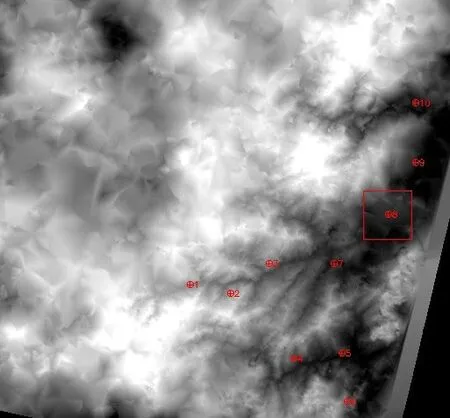
图6 剖面线法精度分析示意图
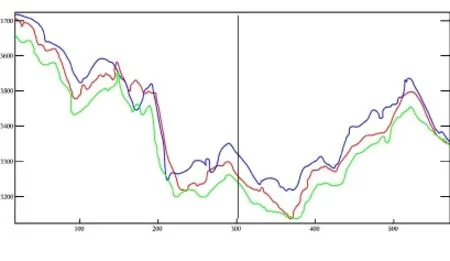
图7 三剖面线对比图
4 结 语
通过本实验发现,由于时下三大遥感软件在生成DEM数据时采用不同的数学模型,所以使得同一遥感数据生成的DEM的精度存在一定的误差,而只有ERDAS软件生成的DEM高程精度较符合实际,这是因为ERDAS采用干涉测量法来提取工程数据。除了软件上的运算模型误差,DEM的精度还取决于地面控制点的精度、分布和数量,同时受影像本身质量的影响,如云层覆盖、传感器拍摄角度和后视影像上的阴影等。
[1]李志林,朱庆.数字高程模型[M].武汉:武汉测绘科技大学出版社,2000
[2]黄玉琪.ASTER影像的DEM自动生成[J].测绘通报,1998(9):13-16
[3]施介岚,史天元.以ASTER立体像对产制数值覆盖模型之精度研究[J].航测及遥测学刊,2006,11(1):59-68
[4]惠凤鸣,田庆久,李应成.Aster数据的DEM生产及精度评价[J].遥感信息,2004(1): 14-18
[5]李斐,张艳梅.基于ASTER立体像对提取数字高程模型的试验研究[J].测绘通报, 2004 (11):1-7
[6]沈强,鄂栋臣,周春霞.ASTER卫星影像自动生成南极格罗夫山地区相对DEM[J].测绘信息与工程,2005, 30(3):47-49
[7]LillesandTM,KieferRW.遥感与图像解译[M].第四版.北京:电子工业出版社,2003
[8]唐新明,林宗坚,吴岚.基于等高线和高程点建立DEM的精度评价方法探讨[J].遥感信息,1999(3):7-10
[9]杨贵军,柳钦火.高分辨率星载遥感立体像对3D测量模型[J].地理与地理信息科学,2006(6):27-29