基于dSPACE的二维自由度控制系统
2013-06-21马玉静李学军
马玉静,李学军,刘 为
(长春大学 a.电子信息工程学院;b.计算机科学技术学院,长春 130022)
0 引言
随着快速发展的计算机仿真技术,半实物仿真技术的应用也十分广泛,成为控制系统设计的重要手段。借助该技术的灵活性和真实性,缩短了研发周期,减轻设计者的工作量,同时也。在众多的半实物仿真系统中,基于dSPACE(德国公司)搭建的半实物仿真系统,实现了与MATLAB/Simulink的完全无缝连接,可快速完成从Simulink模型到dSPACE实时代码生成,因此能反复修改模型设计、离线仿真和半实物仿真;并且通过将快速原型硬件系统与实际要控制设备相连,可以在线修改控制器的参数来改善实际系统的动态性能。
1 dSPACE系统构成及特点
dSPACE(digital Signal Processing and Control Engineering)半实物仿真控制系统[1],是由德国dSPACE公司提供,是基于Matlab/Simulink环境下控制系统开发与性能测试平台。其仿真器包括硬件和软件两部分,其中MicroAutoBox为主要硬件;软件环境包括能生成实时代码、RTI(Real Time Interface)[2]模块库 和自动测试软件(Control Desk)[3]。
dSPACE实时仿真系统与其他实时系统相比较有如下特点:
(1)使用标准组件系统,利用多种CPU、A/D、D/A板,可以对系统进行多种组合,构建半实物仿真系统。
(2)通过Matlab/Simulink的无缝链接,实现从非实时分析设计到实时分析的良好过渡。
(3)精心设计的高可靠性硬件系统,标准总线的硬件接口,基于PC机、WINDOWS操作系统的代码生成及下载软件、试验软件,方便掌握使用。
(4)根据用户的需求,允许用户可以灵活在单板/多板系统、自动生成代码/手工编制代码选择等。
由于dSPACE有无可比拟的优越性,现已在很多领域得到广泛的应用。如汽车、发动机、机器人及工业控制等领域。也被学校及研究部门使用,来解决实际问题。
2 二维自由度工作台设计
2.1 二维自由度工作台的结构
“慧鱼创意组合模型(Fischertechnik)”是德国发明家Artur Fischer博士于1964年发明的。该模型是技术含量很高的工程技术类智趣拼装模型,可以通过多种组合变化模拟简单或复杂的模型,并通过计算机接口及相关软件编程对模型进行控制,采用比较直观的图形化程序语言实现数据采集和仪器控制。本文就是利用慧鱼创意组合的灵活性和创新性来搭建模拟工业上常用到的二维自由度工作台。
二维自由度工作台使用的主要零件是齿轮(C1、C2)、连杆、圆盘、立柱、蜗轮、蜗杆、微型电机(M1、M2)以及各种接插件,紧固件等。按设计要求组装的二维工作台模型。二维自由度工作台实物如图1所示。
2.2 二维自由度工作台的设计原理
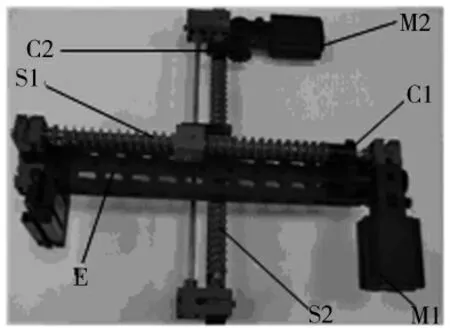
图1 二维自由度工作台实物
该工作平台的运动是由9V直流电机(M1、M2进行驱动,电机又通过两级齿轮减速机构来带动由涡轮和蜗杆构成的螺旋传动系统,并沿直线运动,这样构成了二维自由度工作台的传动系统。其中直流电机M1带动丝杠(S1)沿X轴方向左右移动,直流电机M2通过丝杠(S2)带动运动系统E沿Y轴方向上下移动。
由于在dSPACE平台环境下,通过模块(DAC)输出的电压和电流信号很小,不能直接控制工作台的运动,必须通过一个直流放大驱动电路去控制工作台的直流电机运转,实现对工作台运动的控制。我们采用由LG9110芯片和外围器件构成的电路作为驱动电路,该芯片是双通道推挽式功率放大专用集成电路器件,其抗干扰能力强,而且两个输出端能直接驱动电机的正反向运动,每个通道能通过750~800mA的持续电流,具有较强的电流驱动能力。所以该工作台采用此驱动放大电路完全可以实现对二维自由度工作台运动的控制。
3 半实物仿真试验设计
该半实物仿真平台[4]主要由工控机、PC机、dSPACE仿真控制器和二维自由度工作台等构成。其中采用带有多个插槽的ISA总线的工控机和装有Matlab/Simulink[5][6](Matlab7.0)、dSPACE软件的PC机,Simulink构建控制系统框图,方便调节控制器参数,进行离线仿真,这就构成了半实物仿真的上位机。dSPACE标准组件系统中的处理器与上位机相连,采用光缆来接进行交换数据,采用dSPACE单板系统DS1401控制板作为原型机,实现控制器的控制算法。半实物仿真试验系统结构框图如图2所示。

图2 半实物仿真试验系统结构框图
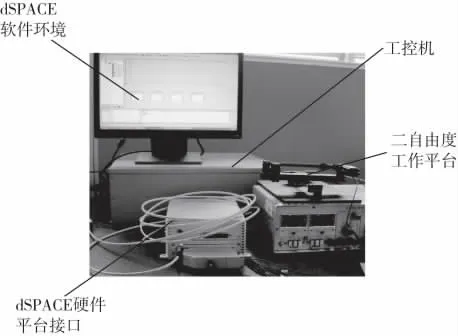
图3 半实物仿真试验台实物图
通常情况下在计算机完成半实物仿真过程,需以下几个步骤:
步骤1:建立Simulink模型。在Simulink模块库将控制所需输入、输出等模块添加到Simulink框图中,设置相关参数。
步骤2:dSPACE平台中的RTI模块库,选择实时仿真测试所需的I/O、A/D、D/A模块,添加到Simulink框图中,并对参数进行设置。
步骤3:选择RTW Build自动完成实时C代码的生成、编译、链接和下载。通过TargetLink下载到硬件平台MicroAutoBox中,进行半实物仿真试验。
步骤4:创建监控界面。在dSPACE软环境ControlDesk下建立虚拟仪表和下载目标应用程序,进行半实物仿真,在线调整参数及在线控制,实现仿真变量的可视化监控,直观反映试验过程。
4 仿真结果
通过已建立的半实物仿真系统,我们选择二维自由度工作台实物的运动实现为控制对象,利用dSPACE仿真控制器,实时调整参数来验证控制效果。
在Matlab/Simulink环境下,采用Simulink建立控制模型实时框图,完成算法框图的建立及代码生成、编译及下载。同时将dSPACE的硬件系统与外部受控对象(二维自由度工作台)对应控制口相连,实现对工作台的实时控制。控制系统仿真模型如图4所示。
控制系统采用脉宽调制方式PWM,加在工作台中直流电机两端的电压为方波形式,其电机速度调节是通过改变方波的占空比实现。控制系统仿真模型如图4所示。
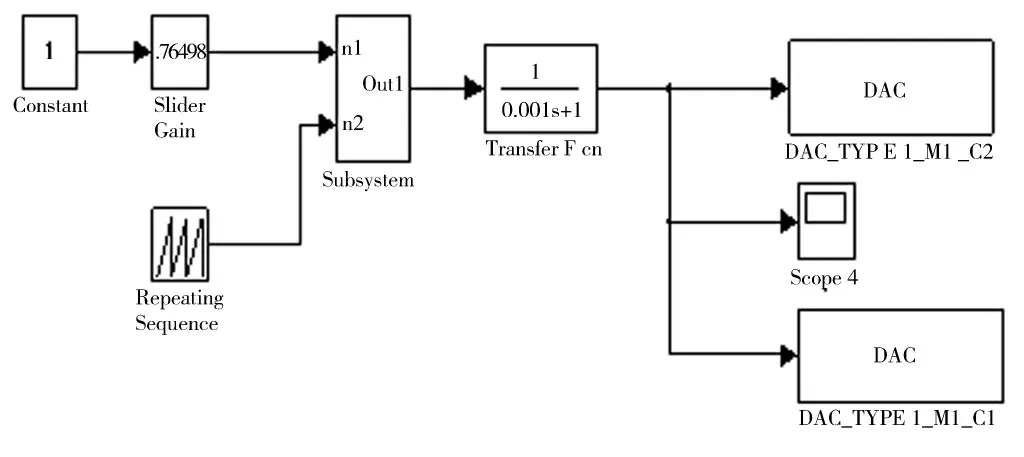
图4 控制系统仿真模型
图中DAC-TYPE1-M1-C2、DAC-TYPE1-M1-C1两个模块实现D/A转换(输出直流电压范围为0-5V,电流为20mA),与二维自由工作台的驱动放大电路相连,来控制工作台的X轴方向和Y轴方向运动,这样就构成了半实物仿真系统的控制回路。通过dSPACE的测试软件(Control Desk)建立监控界面,在线调参,观测控制效果。监控界面输出波形如图5所示。
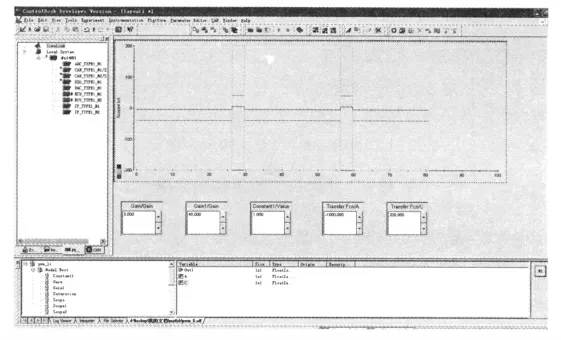
图5 监控界面输出的波形图
5 结语
本文利用dSPACE半实物仿真平台,通过Simulink构建的控制系统模型,借助dSPACE成熟的硬件接口与软件工具,快捷方便的实现了二维自由度工作台系统的控制,达到了预期的效果。说明通过此方法获得的实验结果更能体现实际系统的动态性能,表明dSPACE半实物仿真平台具有高仿真度和可靠性的特点。
[1]dSPACE User Guide Implementation Guide[M].dSPACE Inc.2003.
[2]dSPACE Inc.Real Time Interface(RTI and RTIMP)Implementation Guid[M].dSPACE GmbH.2005.
[3]dSPACE In c.Cont rolDesk Experiment Guide[M].dSPACE GmbH.2005.
[4]李学军,张玲霞,马玉静.基于dSPACE半实物仿真平台设计[J].长春大学学报,2011(6):4-5,12.
[5]杨涤,李立涛,杨旭,朱承元.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002.
[6]雷叶红,张记华,张春明.基于dSPACE/MATLAB/Simulink平台的实时仿真技术研究系统仿真技术研究[J].系统仿真技术,2005,1(3):131-135.
