永磁同步电动机新型滑模观测器无传感器控制
2013-06-19陈长龙
陈长龙,樊 贝,胡 堃
(中国矿业大学,江苏徐州221008)
0 引 言
在永磁同步电动机驱动控制中,首先需要知道电机的转子位置信息,传统的方法是在电机转轴上安装机械传感器(霍尔位置传感器、旋转编码器等)来获得永磁电机的位置和速度信息。一些高精度控制系统,对传感器的精度要求很高,同时由于机械式传感器会增加电动机转轴的转动惯量,加大了电动机的尺寸和体积,这样一方面增加外围线路的连接,使系统易受干扰和不稳定,另一方面也增加了成本。在一些特殊应用场合受工作环境的影响,系统的可靠性也会大大降低,这就使得去掉这些机械式传感器,而利用电机自身的电气特性和数学模型估算出电机的转子位置的无传感器控制技术的研究成为当前研究的热点。基于无位置传感器技术控制的永磁同步电动机调速系统利用电压、电流传感器检测的电机的定子电压和电流以及根据电机的数学模型来估算出电机的转子位置和转速。这样大大简化了系统结构,降低了系统控制成本,后期维护也很方便,满足一些特殊场合的使用要求。由于在永磁同步电动机矢量控制系统中,直轴和交轴电流是通过坐标变换获得,坐标变换需要知道转子位置角,若获取的转子位置角精度不高,将会降低整个控制系统的性能,电机的稳定运行也会受到很大影响[1-4]。
变结构控制是一种控制系统的设计方法,适用于线性及非线性系统。它具有一些优良特性,尤其是对加给系统的摄动和干扰有良好的自适应性。主要策略为在动态控制过程中根据当前系统状态选择合适的不同的“结构”,使系统按预定“滑动模态”状态轨迹而运动,故该策略又被称之为滑模变结构控制[5]。永磁同步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,而滑模变结构控制与控制对象的参数变化和系统的外界扰动无关,因此将其应用于永磁同步电动机控制系统中能大大降低这些影响。高频开关的切换和储能器件的电流电压惯性效应以及实际控制中不存在理想开关,这些均会造成系统出现抖振现象,影响控制系统的精度,增加能耗,抖振严重时会造成系统振荡以致崩溃[6],必须予以减弱。本文采用滑模观测器的理论,根据电机的数学模型结合永磁同步电动机矢量控制方案分析了新型滑模观测器的永磁同步电机无位置传感器矢量控制调速系统的理论算法。仿真和实验表明该系统克服了传统滑模观测器控制系统中存在的抖振问题,较好地实现了永磁同步电动机的位置和速度估计。
1 新型滑模观测器的设计
1.1 理论算法
滑模观测器以系统可测量的定子电压和电流作为输入,同时对电机的反电势进行估计。根据电机理论可知,转子位置角信息包含在电机的反电势中,从而可通过反电势获得转子位置角,同时对电机转速进行估计,这样便可实现电机无速度传感器控制。
永磁同步电动机在两相静止α-β坐标系下的电压方程:
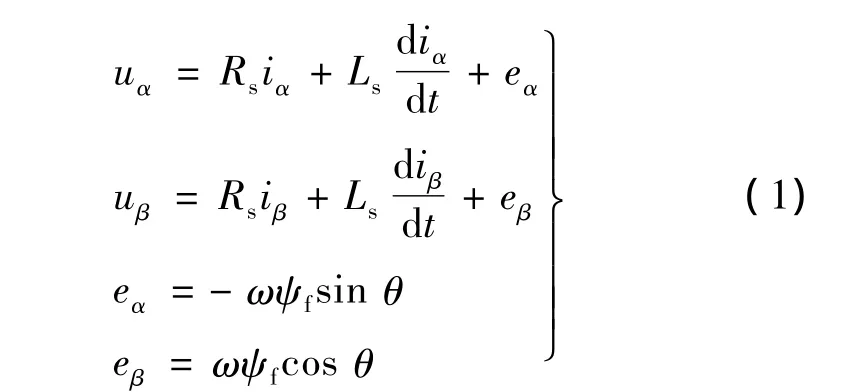
式中:eα、eβ分别为α和β轴的反电动势。将上式改写成状态方程形式如下:

式中:iα、iβ为α轴和β轴电流;Rs为永磁同步电动机定子相电阻;Ls为永磁同步电动机相电感;ψf为永磁同步电动机反电动势系数;ω为永磁同步电动机转子角速度。
其中电机转速变化的机械调整时间远大于定子电流变化的电气调整时间,因此在这里转速的变化可以忽略不计,即≈0;这样可将反电动势模型写成下式:
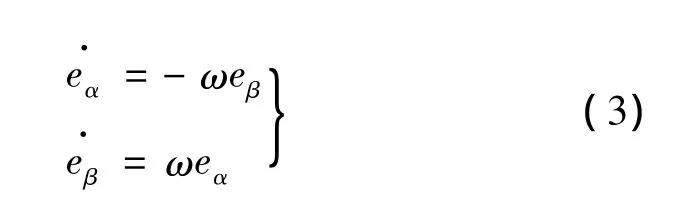
由式(3)可知,永磁同步电动机的反电动势中包含有转子位置与转速的信息,反电动势的幅值与转子转速成正比,其波形为一正弦波[7-8]。在实际控制的系统中,由于高频开关的切换、系统惯性环节以及系统延迟等因素导致出现了抖振,为了消弱这一现象,本文设计一个基于饱和函数的新型滑模观测器:
根据滑模变结构控制理论,这里采用饱和函数sat(s)替代传统滑模变结构中的常值切换符号函数sgn(s),以达到削弱抖振的目的,饱和函数曲线如图1所示。图中Δ为边界层;


图1 饱和函数曲线
由图1曲线可知,它是一种存在3个结构的变结构系统:饱和函数有2个切换面(s=Δ和 s=-Δ),在切换面之间s为线性函数且在s=0上为连续函数。可定义为下面的式子[9]:
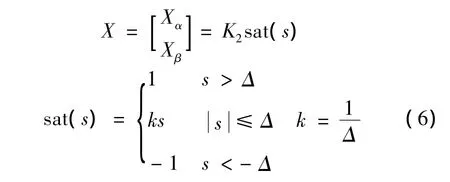
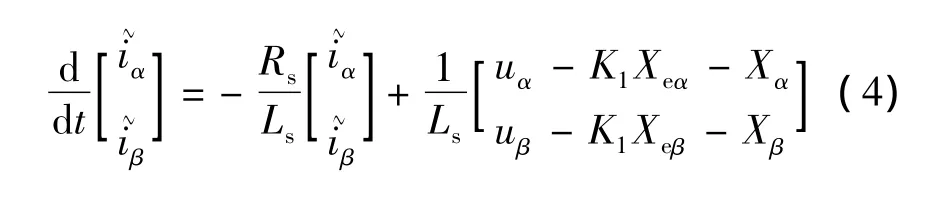
式中:K2为滑模系数,且K2为大于零的系数;X为电流误差开关信号,其中包含的高频信号具有不连续性,为了降低高频信号的影响,在此本文对控制函数采用自适应数字低通滤波器进行滤波从而得到等价控制函数 Xeα、Xeβ,Xeα、Xeβ定义如下:
式中:ωc为低通滤波器的截止频率。结合式(2)和式(4)可得新型滑模观测器的动态方程,定义如下:

根据滑模变结构控制理论,当系统运动点在滑模面上进行滑模运动时,有:
将式(9)代入式(8)得:

这样由上式估算的反电动势值结合式(1)可用下式出计算转子位置角度:
由于传统滑模观测器在估算反电动势的过程中引入了低通滤波器,低通滤波器的引入必然会导致估算出的转子位置的相位滞后,并且随着电机转速的上升滞后的相角会加大。因此在新型滑模观测器中采取了对估算的转子位置角进行一个相位补偿来解决该问题[10]。根据相位响应添加了一个相位延迟表,这样就可以通过查表求得运行时所需要的的相移角Δθ:

基于转子角度补偿的滑模估算转子位置:

式中:ωc为低通滤波器的截止频率。
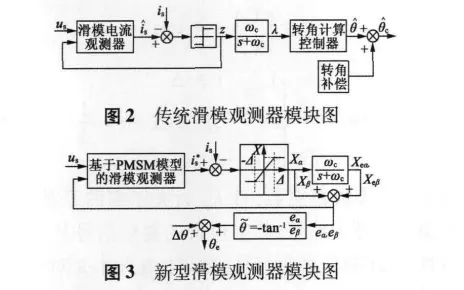
图2和图3分别给出传统滑模观测器与新型滑模观测器的模块图。
2 转子速度估计
计算转速的方法通常是对估算转子位置求微分:

该方法存在计算精度不高的问题,如果滑模观测器估算的转子位置角出现了较小偏差,通过微分计算就会导致转速估计值存在较大偏差。针对此问题,可以采用低通滤波器对其进行低通滤波来解决,但是低通滤波器对降低估算转速误差的效果不但达不到要求,而且还会引起引入幅值的衰减和相位的滞后,估算效果并不是很好[11]。本文在此介绍一种采用锁相环(PLL)的方法来计算转速的策略。其原理是将补偿后的角度估计值通过锁相环后得到速度估计值。设计的PMSM锁相环转速估算原理框图如图4所示。
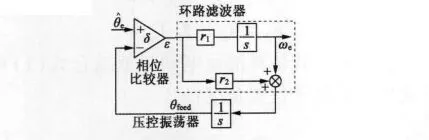
图4 基于锁相环的转速估算
将估算的转子位置角与反馈位置角进行相位比较后获得误差信号ε。定义误差信号ε如下:

由误差信号ε可定义预测方程:
3 仿真分析
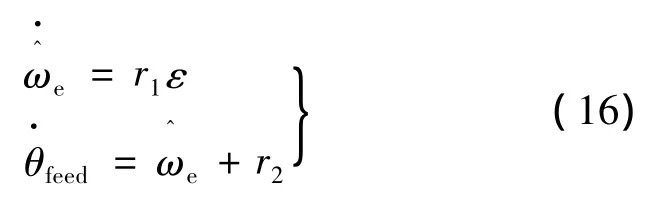
本文利用MATLAB/Simulink设计的仿真框图对本文所提出的基于新型滑模观测器的永磁同步电动机无传感器矢量控制策略的可行性和有效性进行仿真试验,仿真框图如图5所示。电机控制系统采用矢量控制方法,其中id=0的策略,速度环和电流环均采用PI控制,观测器分别采用传统滑模观测器和新型滑模观测器,最后对两种观测器所得到的仿真结果进行了比较分析。
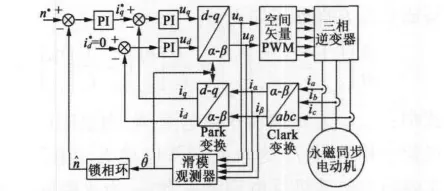
图5 永磁同步电动机无传感器控制仿真框图
图6 、图7分别为给定转速为50 rad/s时两种观测器的仿真波形。由图6(a)、图6(b)和图7(a)、图7(b)比较可以看出,采用新型滑模观测器得到的估算电流可以很好地跟踪实际电流iα,同时估算电流峰值的抖振现象也得到明显削弱,由此可见采用近似饱和函数法替代传统开关函数的新型滑模观测器能够消弱固有的抖振现象。由图6(c)和图7
(c)比较可得,改用近似饱和函数法后滑模观测器估算的反电势和的波形也得到比较大的改观。图6(d)和图7(d)为估算转子位置角θe跟踪实际转子位置角θ的波形图,从图中可见,采用相位补偿后转子转角的估算误差明显降低。从图6(e)和图7(e)可见,将转速的估算方法改为锁相环法之后,所估算的转速能较好地跟踪了给定转速的变化。
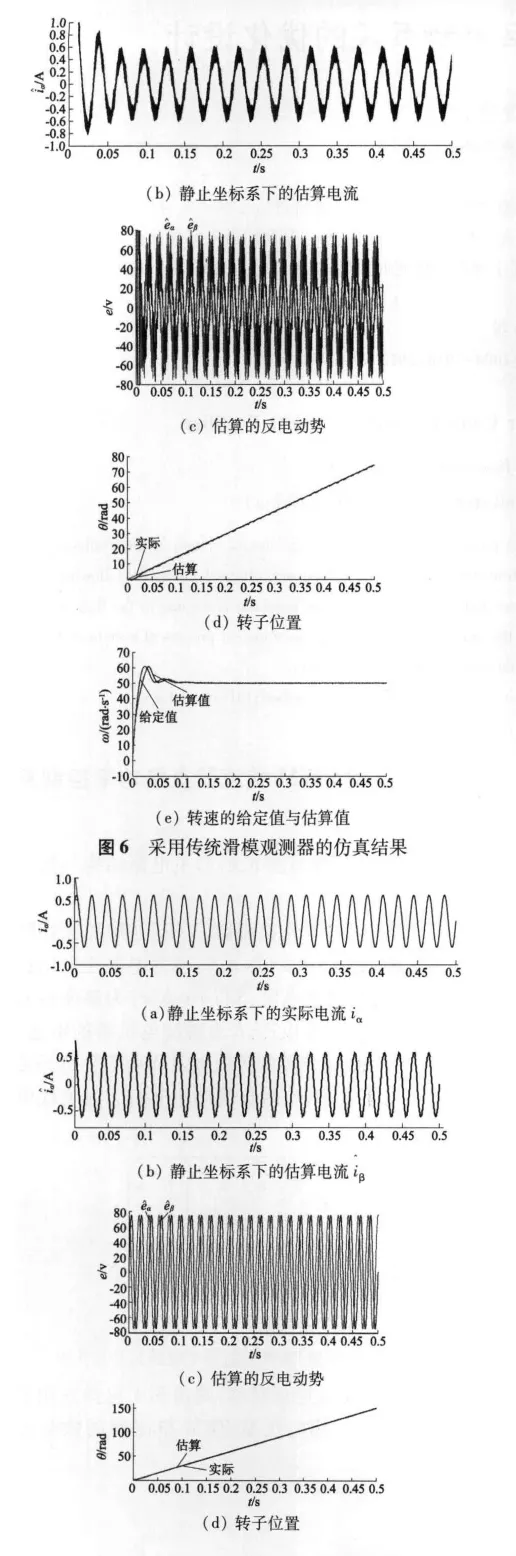
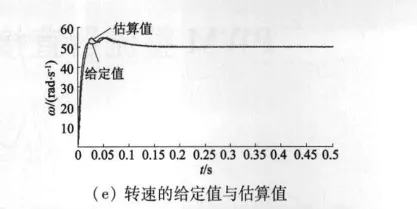
图7 采用新型滑模观测器的仿真结果
4 结 语
本文在分析了传统滑模观测器的基础上,把饱和函数引进滑模观测器,并采用了锁相环法计算转速的策略,设计了一种新型滑模观测器同时搭建了基于该观测器的永磁同步电动机无位置传感器控制的仿真模型。仿真结果表明:设计的新型滑模观测器对传统滑模观测器控制系统中存在的抖振问题具有明显的消弱,估算转速能较好地跟踪给定转速,实现了对转子位置和转速的高精度估计;验证了基于该方法的PMSM无位置传感器矢量控制策略是可行的、有效的。
[1]Dhaouadi R,Mohan N,Norum L.Design and implementation of an extended Kalman filter for the state estimation of a permanent magnet synchronous motor[J].IEEE Transactions on Power Electronics,1991,6(3):491 -497.
[2]丁炜,狄可可,齐冬莲,等.基于SMO的PMSM无位置传感器算法研究[J].电测与仪表,2009,46(8):8 -12.
[3]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[4]朱喜华,李颖晖,张敬.基于一种新型滑模观测器的永磁同步电机无传感器控制[J].电力系统保护与控制,2010,38(13):6-10.
[5]王丰尧.滑模变结构控制[M].北京:机械工业出版社,1998.
[6]郭清风.永磁同步电机磁极位置检测技术的研究[D].哈尔滨:哈尔滨工业大学,2007.
[7]鲁文其,胡育文,黄文新,等.无刷直流电机无位置传感器转子位置自检测复合方法[J].电工技术学报,2008,23(9):71-75.
[8]储剑波.驱动空调压缩机的永磁同步电动机的控制技术研究控制[D].南京:南京航天航空大学,2010.
[9]孙杰,崔巍,范洪伟,等.基于滑模观测器的永磁同步电机无传感器矢量控制[J].电机与控制应用,2011,38(1):38 -41.
[10]王寅东.基于新型滑模观测器的永磁同步电机无位置传感器控制[D].天津:天津大学,2011.
[11]鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83.
