面向血型分析仪的自动加样机械臂控制系统设计*
2013-06-16黎焰勤陈里里
廖 强,黎焰勤,陈里里
(1.重庆大学机械传动国家重点实验室,重庆 400044;2.重庆大学机械工程学院,重庆 400044)
1 引言
随着医疗检测技术的发展,血型分析鉴定、交叉配血和抗体筛查等的检测方法已从一般的手工玻片法或试管法,发展到半自动检测,再发展到今天的全自动检测。但目前国内的自动化医疗仪器自动化水平较低,国产血型分析设备基本达不到全自动化要求,全自动血型分析系统的研究刚刚开始,除少数由于检测量非常巨大,半自动血型分析仪无法完成日常检验工作而使用进口全自动血型分析设备的大型医疗机构外,所使用的血型实验仪器仍处于半自动状态[1]。相反,国外在血型分析仪器领域起步较早,发展较为迅速,实验仪器更新换代较快,全自动血型鉴定分析设备自动化程度较高,从而大大提高了血液检测的效率,降低了人工操作所需的人力成本[2]。全自动血型分析仪的一个重要组成部分是其加样装置,加样装置在不同位置进行抽放样,因此加样装置在不同位置间移动的自动化程度是血液分析仪的自动化程度的重要基础组成部分[3]。所以,针对目前国内发展现状,笔者设计了基于DMC5400运动控制卡的血型分析仪自动机械臂加样控制系统,实际测试表明该系统能满足血型分析仪要求的快速化和准确性。
2 控制系统总体设计
血型分析仪自动加样过程:加样装置安装在一个直角坐标运动平台上,通过直角坐标平台带动加样装置移动,首先加样装置移动到样品试管处,抽取样品,再移动到96微孔板上放出样品,然后移动到试剂试管处,抽取试剂,移动到96微孔板上,放出试剂,让试剂与样品混匀,然后再吸取混匀和的液体,运动到测量槽,放出液体,然后到清洗位置清洗,最后回到原点或进入下一个工作循环。加样装置的工作路径可由图1所示。

图1 加样装置工作循环
因此,本控制系统的主要任务就是控制直角坐标运动平台带动加样装置运动到指定位置。该系统由主控计算机、DMC5400运动控制卡、伺服驱动器、伺服电机、滚珠丝杠、光栅尺等组成,构成一个闭环交流伺服运动控制系统,其中DMC5400是本系统的核心和重点[4]。其系统结构图如图2所示。

图2 控制系统结构图
3 控制系统硬件设计
目前,常用的运动控制技术有直流电机驱动技术、全闭环交流伺服驱动技术、可编程计算机控制器以及运动控制卡等[5]。运动控制卡是一种基于工业PC机的上位控制单元,工业PC机具有软件资源丰富、运算能力强大、精度高、扩展性强等特点,采用“运动控制卡+工业PC机”模式使控制系统更加标准化、柔性化。因此,本控制系统采用运动控制卡来实现。
3.1 控制系统硬件结构设计
该控制系统硬件部分由主控计算机、DMC5400运动控制卡、交流伺服控制驱动器、伺服电机组成。运动控制卡插在主控计算机的PCI插槽上,通过主控计算机向运动控制卡发出各种运动指令,然后通过伺服驱动器X、Y、Z三轴电机的运动,使机械臂到达空间指定位置。硬件组成结构如图3所示。

图3 系统硬件结构图
3.2 控制卡的选型与控制电路设计
本系统的运动控制卡采用雷塞公司的DMC5400运动控制卡。该卡以ASIC集成电路为核心,基于PCI总线,可控制四轴数字式伺服电机或步进电机,可实现多轴插补联动、编码器位置检测等功能。常用于工业机器人、生物医学自动采样处理设备、机器视觉及自动检测设备、激光加工设备、电子产品装配测量设备、半导体及LCD生产设备、特殊数控机床等机电一体化设备当中。
为使DMC5400控制卡正确控制伺服电机驱动器驱动电机运动,按照图4所示连接控制电路。分配控制卡接口的1号引脚“PUL1+”和2号引脚“PUL1-”连接X轴电机驱动器,这几个引脚均用于差分输出脉冲信号,控制X轴直线运动平台的运动位置和速度;分配3号引脚“DIR1+”和4号引脚“DIR1-”连接X轴电机驱动器,用于差分输出方向信号,控制X轴直线运动平台的运动方向。Y轴与Z轴的控制卡接口与X轴控制卡接口类似,如图4所示。

图4 运动控制卡控制电路设计
3.3 伺服电机与驱动器的选择
该系统选用大惯量永磁同步电机MHMD 022P1U,其主要参数为:额定功率为200 W;额定频率为200 Hz;额定转速为3000 r/min;额定转矩为0.64 N·m;最大转矩为1.91 N·m;相电压为200 V;绕组为星型接法;编码器选用5线制增量式编码器,分辨率为10000,脉冲数为2500 p/r。选用松下Panasonic脉冲控制专用驱动器,其型号为 MADDT1207003,主要参数:最大瞬时输出电流10 A;电源单相200 V,电流检测器的额定电流为7.5 A。
4 控制系统软件设计
4.1 软件总体架构
DMC5400运动控制卡是本控制系统关键硬件,是一款高性能的PCI四轴运动控制卡。DMC5400运动控制卡随卡提供了Window 2000/XP等操作系统下的设备驱动程序和运动控制函数动态链接库dmc5400.dll,它是一个运动控制API函数库,因此在开发上层应用软件时不必了解底层硬件细节,这使得编程变得相对简单[6]。
系统的软件部分在Windows XP系统下运行,以VC++6.0为开发工具,采用面向对象和模块化思想进行设计。机械臂运动控制系统软件部分的程序由初始化模块和运动执行模块组成[7]。软件的控制程序流程如图5所示。
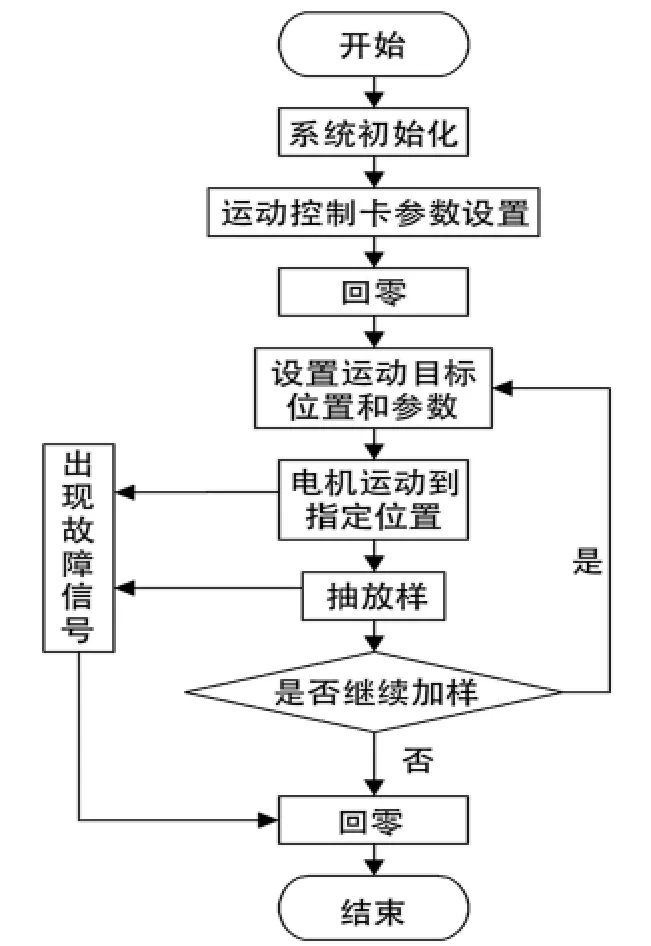
图5 控制程序流程图
4.2 运动控制卡的编程
4.2.1 初始化控制卡
初始化模块即对DMC5400运动控制卡分配系统资源以及参数设置,包括脉冲参数设置、伺服电机参数设置、原点参数设置以及限位参数设置[8]。在初始化函数中添加的代码如下。
CardCount=d5400_board_init();//为DMC5400控制卡分配系统资源并初始化控制卡,返回值为0~5,数字表示控制卡的数量
if(CardCount==0)
{MessageBox(“没有发现 DMC5400控制卡!”);}//错误提醒
for(i=0;i<4;i++)
{d5400_set_pulse_outmode(i,0);//设置 4 个轴的脉冲输出模式
d5400_config_INP_PIN(i,0,1);// 设置 4 个轴的伺服电机参数
d5400_config_home_mode(i,1,4);//设置 4 个轴的原点参数
d5400_config_softlimit(i,1,1);//开启软件限位设置
d5400_enable_softlimit(i,1);
}
d5400_set_softlimit_data(0,- 100*2000,800*2000);//设置X,Y,Z轴的运动范围
d5400_set_softlimit_data(1,- 100*2000,500*2000);
d5400_set_softlimit_data(2,- 20*2000,140*2000);
4.2.2 运动控制模块
运动执行模块即对运动控制卡发送指令,完成预定的动作目标。其中,运动控制模式分为单轴运动控制和多轴运动模式。
(1)单轴运动控制
DMC5400运动控制卡提供的单轴运动控制模式有梯形速度曲线运动模式、S形速度曲线运动模式和连续运动模式,为降低运动过程中的速度波动以及简化编程,这里采用S形速度曲线运动模式。
d5400_s_pmove(WORD axis,long Dist,WORD posi_mode);其中,axis表示轴号,Dist表示运动距离,posi_mode表示坐标模式。
(2)多轴运动模式
多轴运动模式是指DMC5400运动控制卡提供直线插补运动、圆弧插补运动和连续插补运动。由于本控制系统对空间运动轨迹没有要求,因此这里采用最简单的直线插补运动。
d5400_t_line2(WORD axis1,long Dist1,WORD axis2,long Dist2,WORD posi_mode);其中,axis1、axis2表示第一、二轴轴号,Dist1、Dist2表示第一、二轴运动距离,posi_mode表示坐标模式。
4.3 实验及结果
坐标平台的主要精度指标是重复定位精度[9],为测定其重复定位精度,选定运动过程中的零点、测量槽以及清洗处三个点,按给定的速度、加速时间,让X、Y、Z三轴重复运动运动30次,并测量其误差,并取所测数据的平均值与三倍均方值为其精度,如表1所列。由表1可知直角坐标平台的重复定位精度最大为0.312 mm,远高于血型分析仪中使用的试管最小直径6 mm,能够满足实际使用过程中对抽放样装置针头的定位要求,实现了对血型分析仪自动加样机械臂的自动控制。
5 结语
临床上使用血型分析仪快速分析病人血液样本的血型及理化性质对于及时诊断病情具有重要意义,笔者基于DMC5400运动控制卡设计了面向血型分析仪的自动加样机械臂控制系统。通过大量实际测试,该控制系统不仅能实现快速加样,而且减少了人工操作,避免了人为因素的随机性,使检测更可靠。后续工作将采用可编程控制器代替PC,以减小该系统的体积并控制成本,使该系统的实际应用更为广泛。

表1 坐标平台的重复定位精度
[1]秦红星.对血液细胞图像自动分割的研究[D].重庆:重庆大学,2004.
[2]Sean Graves,Bill Holman,Manuel Rossetti,et al.Robotic Automation of Coagulation Analysis[J].Clinica Chimica Acta,1998,278(2):269-279.
[3]罗刚银.全自动血型分析系统关键技术的研究[D].长春:中国科学院长春光学精密机械与物理研究院,2012.
[4]李德亮,舒志兵.基于运动控制板卡的电路板钻孔机控制系统设计[J].机床与液压,2012,40(8):131 -133.
[5]孔慧勇.基于运动控制卡的全闭环控制系统研究[D].成都:四川大学,2003.
[6]王 敏,邵定宏,陆金桂.动态链接库技术及其应用实例[J].微计算机信息,2006,22(9):272 -274.
[7]吴 琳,崔洪亮,信 东,等.基于伺服电机和运动控制器的目标仿真实时性控制研究[J].电子产品世界,2006(6):26-28.
[8]张学文.四自由度教学型机器人运动轨迹控制技术研究[D].重庆:重庆大学,2009.
[9]吴岚军,闫献勇,张春野,等.DY-2003生物芯片点样仪的研制[J].现代科学仪器,2004(2):24-30.