一种投影预处理算法在局部CT图像重建中的应用
2013-06-13张卫贞
张卫贞
(太原科技大学电子信息工程学院,山西太原 030024)
0 引言
工业CT作为一种先进的无损检测手段,自70年代末期以来得到越来越广泛的应用,使得观察复杂构件的内部结构和缺陷成为可能。但由于被检工件通常较大,而且有噪声的存在(通常为高斯白噪声),使得人们越来越倾向于通过研究被检工件的局部投影数据来实现工件感兴趣区域的局部重建。为此,本文在局部CT图像重建前,采用一种基于小波变换的Wiener 滤波投影预处理算法,采取这种方法可以在保证获得较理想投影数据的前提下对工件感兴趣区域实现实时重建和检查,而且其检测过程也符合实际应用的需要。
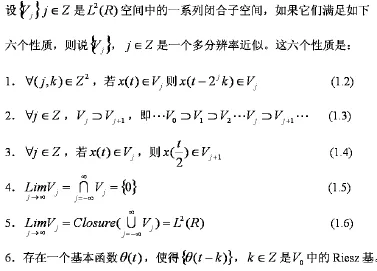
1 小波分析
1.1 小波局部性分析
由于利用FBP算法(滤波反投影算法)重建CT图像时需要用到全部的投影数据。本文利用小波分析具有可局部分析的优点,利用ROI(感兴趣区域)的投影数据可以对一个大工件进行局部性分析。小波的局部性质[1]分析:
定理1.1 设函数f(t)在区间[-A ,A]外的值为零,且满足∫tnf(t) = 0 ,n=0,1,...N,那么对于|s|>A,有下式成立 :

通过定理可以看出,若函数f(t)具有高阶的消失矩,那么该函数经过希尔伯特变换将会在有限的区间内迅速衰减到零。若一个函数f(t)是一个紧支撑且具有高阶消失矩的函数,那么经过希尔伯特变换,变换之后的支撑区间将会在有限区域内迅速衰减到零。
1.2 小波选取
在不同应用领域,小波基的选取准则也不尽相同。工程应用中,小波基函数的选取在小波分析中占有重要地位。小波基的选取需根据具体问题中所要反映的具体特征,使得通过小波变换能更方便地刻画待处理信号的不同特征。美国学者Daubechies构造的正交小波“Coiflets”,该小波简记为CoifN,N=1,2,…,5。在db小波中Daubechies小波仅考虑了使小波函数ψ(t)具有消失矩N 阶,而没考虑尺度函数。R.Coifman于1989年Daubechies提出建议希望能构造出使也具有高阶消失矩的正交紧支撑小波。Daubechies接受这一建议,并构造出了这一类以Coifman的名字命名的小波。CoifN是紧支撑正交、双正交小波,支撑范围为6N-1,也是接近对称的。的消失矩是2N,ψ(t) 的消失矩是2N-1,我们在实际的局部重建算法中,将选用Coif3小波。该小波的尺度函数和小波函数ψ(t)分别具有5阶和6阶的消失矩,而其支撑长度均为17。
1.3 小波多分辨率分析
Mallat给出了多分辩率分析的定义:
给定不同的分辨率水平j的信号,通过在尺度和小波两个正交的子空间上分解,得到的图像分别反映图像的低频概貌信息、高频细节信息,最后利用小波逆变换可得到对应的多分辨率重建图像。
2 Wiener滤波降噪原理
图像去噪是数字图像处理中的重要环节和步骤。降噪效果的好坏直接影响到后续的图像处理工作。图像信号在产生、传输过程中都可能会受到噪声的污染。重建过程中,工件投影数据存在一定的噪声,通常为高斯白噪声,Wiener维纳滤波使原始图像和其恢复图像之间的均方误差最小的复原方法,是一种自适应滤波器,根据局部方差来调整滤波器效果。对于去除高斯噪声效果明显。为此,我们选择Matlab图像处理工具箱中Wiener2滤波函数,该函数利用图像的局部方差来调整滤波器的输出,可以实现对图像噪声的自适应滤除。
Wiener2函数采用的算法是首先对每一个像素估计出在以该像素为中心的窗η内估计局部矩阵和方差,M和N为滤波窗的长和宽。
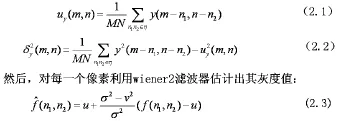
式中f(n1,n2)是像素点 (n1,n2)的灰度值(含噪时);u是像素点 (n1,n2)的局部灰度均值,局部的大小就是点 (n1,n2)邻域的大小;σ2是像素点(n1,n2)的局部方差;v2是图像中噪声的方差;是像素点 (n1,n2)去噪后的灰度估计值[2]。
3 算法描述与实现
1.利用0~179°每隔1个角度的Shepp-Logan头颅投影数据(367*90)低分辨率重建,得到的低分辨率图像如图3.2(a)所示,通过图像观察可发现头颅局部区域有两个大小不同的亮点存在,选出有亮点存在区域的像素点。
2.对存在亮点区域像素点 (n1,n2)的含噪投影数据进行小波3级分解,并对高频部分进行Wiener2滤波去噪,最后对亮点存在区域投影数据小波逆变换,得到小波局部重建图像xˆ,算法框图如图3.1:
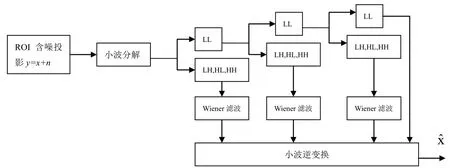
图3.1 基于小波变换的wiener滤波降噪框图
从图3.1可看出,该方法采用小波变换与Wiener滤波相结合的方法,将这两种方法的多分辨率、稀疏性、去相关性、选基灵活性等的优点结合在一起用于图像处理。
另外,该算法仅对亮点局部投影小波分解后的高频部分进行维纳滤波降噪处理。由于白噪声频谱很宽,在对亮点局部含噪投影数据采用低通滤波器滤波时,必然会使图像的高频信息受到一定损失,因此该算法可以有效的保留图像的细节信息。
实验结果如下:
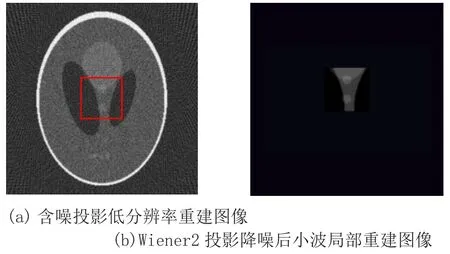
图3.2 Shepp Logan头颅实验结果
4 结论与分析
为了对亮点局部重建图像进行分析,本文利用规范化图像平方根误差e,即对一个N×N的图像:

其中,f为对应原始图像的像素点值,为重建图像第i行和第j列的像素点值,为原始图像平均像素点值。对亮点局部重建图像区域,利用式(4.1)所定义的规范化图像平方根误差e,计算所得的e值为0.0498。
从图3.2所示的局部重建图像和亮点局部重建区域平方根误差分析可以得出,对于只对大工件局部感兴趣的含噪投影,我们可以根据低分辨率图像所能分辨出的感兴趣区域,只对感兴趣区域的投影进行降噪处理及重建,通过仿真分析可知,该方法不仅省去了处理全部投影数据的时间,而且对于局部感兴趣区域的重建结果,相对原图像误差较小。
[1]刘冰.SPECT局部重建算法研究[D].北京理工大学硕士论文.2008.6.
[2]Crouse M S,Baraniuk R G,Nowak R D.Hidden Markov models for wavelet-based signal processing[A].Pric 30th Asilomar Conf[C].Pacific Grove,CA,1996,1029-1035.