基于CCS和GL规范的深潜器耐压结构计算研究
2013-06-12杨卓懿庞永杰
刘 伟,杨卓懿,庞永杰,陆 振
(哈尔滨工程大学 船舶工程学院,哈尔滨150001)
环肋圆柱壳作为一种耐压结构,在潜水器中有着广泛的应用,是潜水器核心设备的保护体。对于潜器耐压结构的初步设计,通常是基于规范。目前现行的潜器规范中,德国GL潜器规范[1]发展历史相对较长,其最新的潜器规范[2-3]针对载人潜水器及ROV、AUV等无人潜水器的各自特点,进行了详细的分类,并定义了相应的设计计算准则。尤其对于耐压结构的制造误差、焊接变形等方面有一套独特的计算方法。目前我国的潜器规范[4]中对圆柱形耐压壳的强度和稳性计算及其衡准,基本上是套用了潜艇设计计算规则中的有关部分[5]。潜水器与潜艇虽然结构相似,但也有许多不同点。建造潜水器的材料一般是采用具有高比强度高比刚度的金属或非金属材料,采用这些高强度材料可使潜水器具有较深的工作深度,并能有较大的有效负荷[6]。通过对两国规范相应的强度和稳性特征量计算和校核方法对比,可为我国潜器规范的更新完善提供相应的借鉴。
1 表征强度和稳性的特征量计算方法
在CCS潜器规范和德国GL潜器规范中,承受外压的环肋圆柱壳需要计算的强度和稳性特征量主要包括壳板强度、肋骨强度、壳板稳性、舱段总体稳性。
1.1 CCS潜器规范设计计算方法
1.1.1 安全系数把计算深度与工作深度之比称作安全系数,计算压力取为最大许用工作压力的1.5倍。
1.1.2 壳板强度
圆柱形壳体的壳板应力应检验跨度中点处壳板纵剖面上的中面周向平均应力σ1和支座边界处壳板横剖面上内表面应力σ2。见式(1)、(2)。

式中:pj——计算压力;
Ro——耐压圆柱壳体半径;
t——壳板厚度。
所得应力应满足:σ1≤0.85σs

所得应力应满足:σ2≤1.15σs
1.1.3 肋骨强度
肋骨应力,取其周向应力来表征,按式(3)计算。

所得应力应满足:σf≤0.6σs
以上式中:k1,k2,kf均为系数,可由参数u,β查规范[7]的相应图表决定。

式中:L——肋骨间距;
f——肋骨剖面面积。
1.1.4 壳板稳性

式中:pe——理论临界压力,按照式(5)计算。

式(6)中Cs为材料非线性修正系数,根据σe/σs查规范[7]的相关图谱确定。
所得屈曲压力值应满足pcr≥pj。
1.1.5 总体稳性
对舱段长度L之间的壳板和肋骨,应校验其总体稳性,总体失稳压力pcr由式(8)确定。

式中:pe——理论临界压力,按式(9)计算。
式中:n——周向失稳波数,应使pe最小,Cs与上节相同,可查规范[7]的相关图谱确定。
所得总体失稳压力应满足pcr≥1.2 pj。
1.2 德国潜器规范设计计算方法
1.2.1 安全系数
德国GL潜器规范与我国潜器规范类似,也是在明确计算压力pj的情况下,计算得到壳板和肋骨的各种应力。但德国潜器规范对于计算压力定义了三种不同的工况:名义下潜压力pNDP,测试下潜压力pTDP和极限下潜压力pCDP,针对这三种不同工况需要进行各自的计算和强度以及稳性校核。名义下潜压力pTDP=0.101(105Pa/m)×下潜深度H(m)。同时,德国潜水器针对载人和无人潜水器的不同特点,设置了相应的安全系数,其安全系数随深度变化见表1和表2。
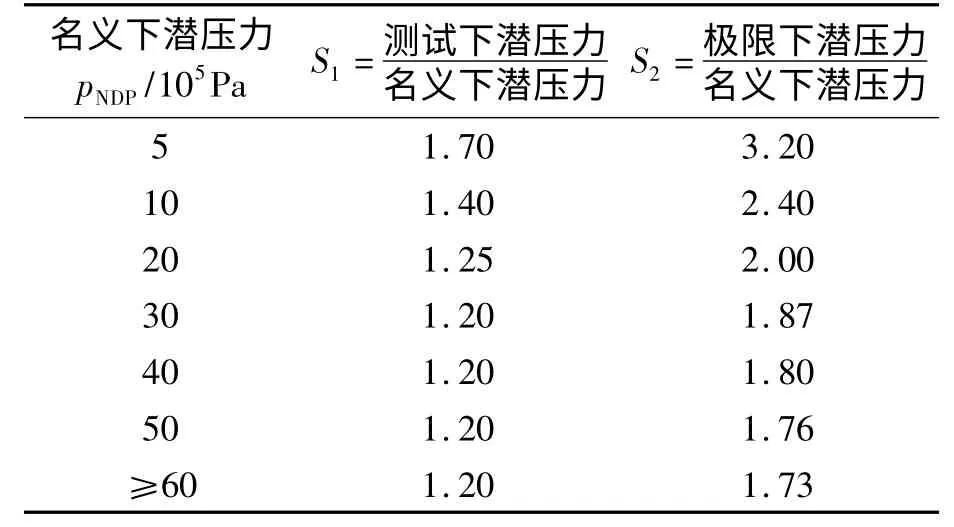
表1 载人潜水器安全系数与深度关系
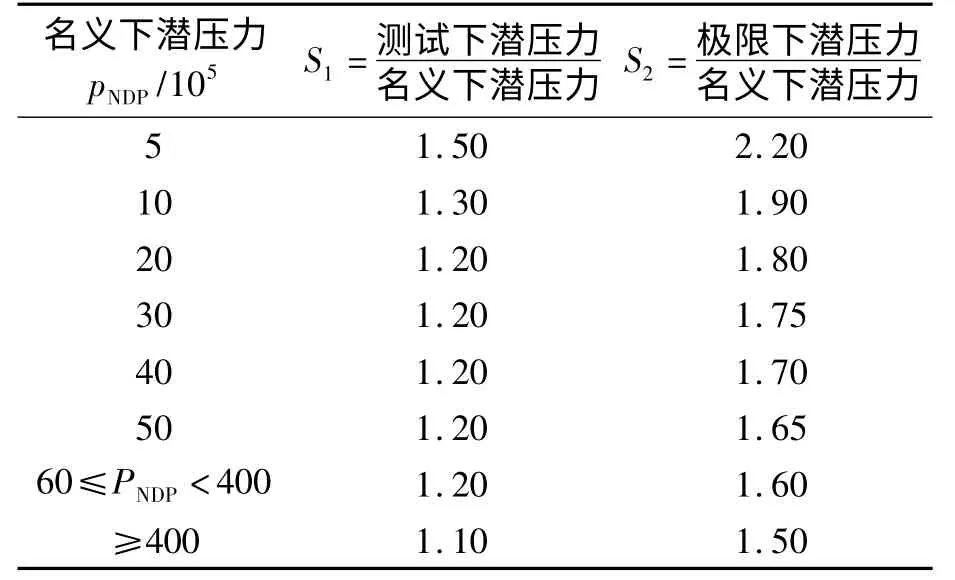
表2 无人潜水器安全系数与深度关系
1.2.2 壳板强度
跨中处壳板强度由式(10)和式(11)确定。
式中:σo——非环肋圆柱壳周向应力;
σbx,M——肋骨间纵向弯曲应力;
σmx———纵向薄膜应力;
s——壳板厚度;
Rm——耐压圆柱壳的平均半径;
ν——泊松比;
WM——肋骨中点径向位移;
L——肋骨间距;
sw——肋骨宽度。
参数Aeff,F2,F4的计算方法,由GL规范有关算式计算,此处不一一列出。
在跨端处壳板强度按照式(12)和式(13)确定。

所得的应力应满足
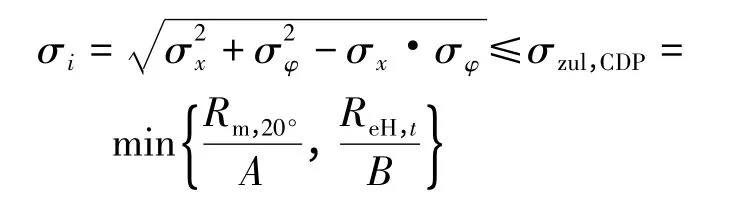
式中:σbx,F——肋骨处周向应力;
WF—肋骨处径向位移;
σmφ,F——肋骨处纵向弯曲应力;
Rm,20°——室温为20℃时的最小抗拉强度;
ReH,t——设计温度下材料的屈服极限或材料应变为0.2%时对应的应力;
A、B的取值见规范[7];
σx,σφ——轴向和周向应力;正负号表示壳体的外内表面;
F3——参数。
1.2.3 肋骨强度
周向应力为

弯曲应力为

式中Wel按式(16)计算,e等参数计算方法,此处不一一列出。

式中:wo——肋骨圆度误差;p——极限下潜压力。
png按式(22)确定。文献[2]给出Rf、RD。
1.2.4 壳板稳性
理论弹性屈服压力按照式(17)计算。

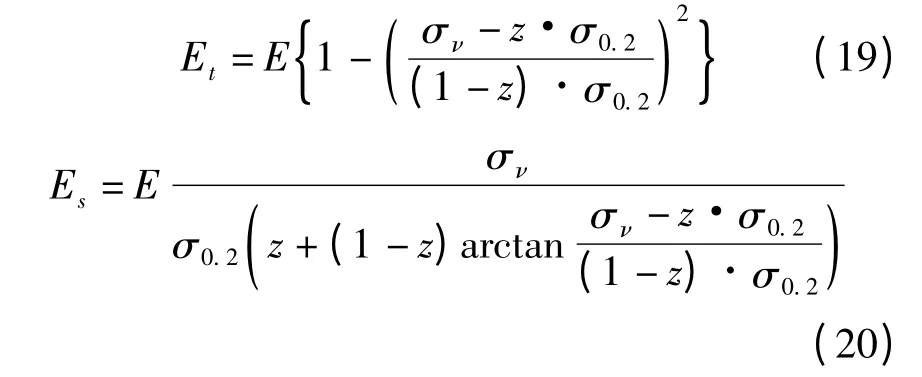
理论弹塑性屈服压力按照式(18)计算。

式中切线模量Et和割线模量Es可由式(19)和式(20)得出。
理论弹塑性屈服压力picr乘以r应大于计算压力pj,其中折减系数r按式(21)计算。

1.2.5 总体稳性

式中PF和PB按式(23)和式(25)计算。

式中:RC,D——到肋骨型心的半径;
IF——肋骨附连带板的惯性距。
带板长度Leff由式(24)计算。
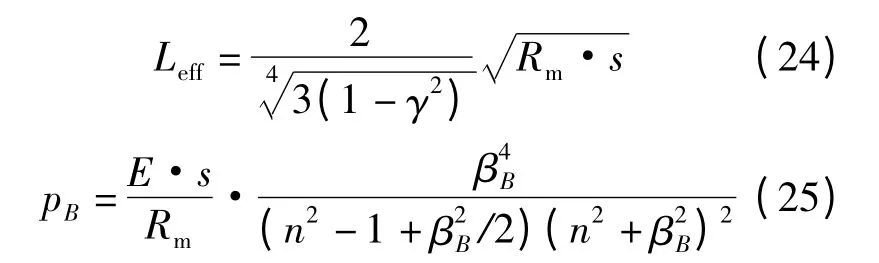
式中:n——周向失稳半波数,其它参数的定义和计算方法可见规范[2]。
所得到的屈曲压力应满足于png>1.07Pj。
2 规范计算及校核方法的对比分析
为了更直观地体现两国规范的差异,下面给出算例,同时应用有限元软件对相应强度特征量进行计算,与规范中相应计算结果,进行逐一的对比(见表3),并对造成的差异进行分析。
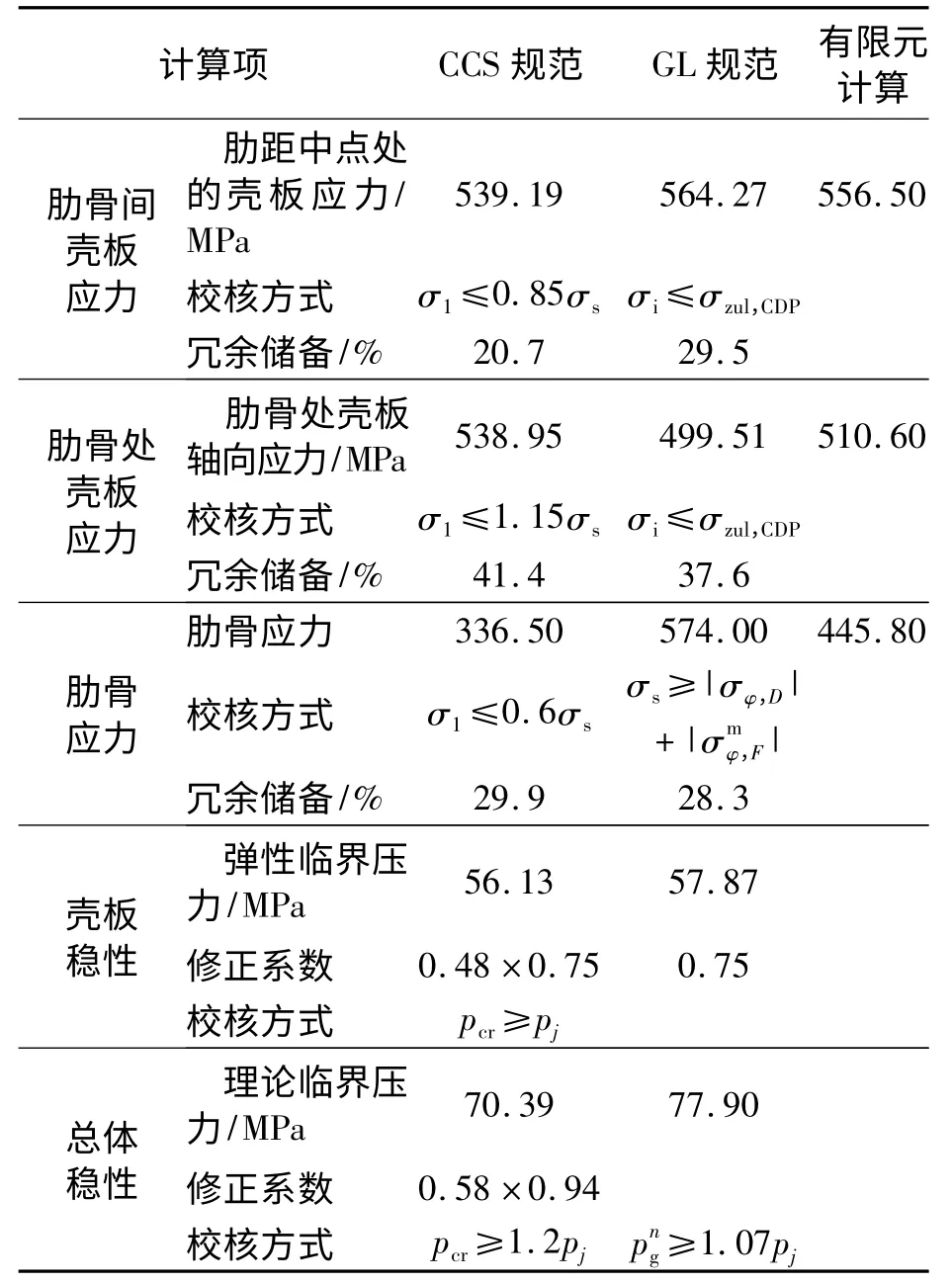
表3 两种计算结果的比较
该潜器圆柱形耐压艇体及下潜深度等参数为:圆柱壳长L=9.2 m,圆柱壳半径R=875 mm,壳板名义厚度t0=24 mm,肋骨采用球缘扁钢ΓNO.18a,肋骨间距为l=450 mm,钢材屈服极限为σs=800 MPa,钢材弹性模数E=2.06×105MPa。潜器工作深度为h=1 000 m,安全系数统一取为CCS规范值1.5,故计算压力pj=15 MPa。
通过表2可以看出,两国规范对于强度和稳性特征量的计算大体相同,但具体的数值和校核方法存在差异。
1)两国规范都是在明确计算压力pj的前提下,计算得到壳板和肋骨的相应应力,我国规范考虑了纵向力对壳弯曲的影响即梁柱效应,而GL规范则没有体现。
2)两国规范对于相应强度特征量的计算较为一致。但在强度的衡准上,GL规范是对于等效应力进行校核,同时考虑了耐压壳体内外表面应力的不同,而CCS规范考虑的是应力最大的那个表面。在校核安全系数方面,CCS规范对不同的强度特征量的要求不同。
3)在肋骨应力的考虑上两国规范有较大差异。德国GL规范对于内外肋骨布置形式和偏心距有所考虑,我国这方面没有做任何处理。这样无论内外肋骨,无论腹板高低,只要横剖面积一样,其计算结果就相同。这显然是不合理的,此外,我国规范在肋骨强度校核准则中认为,肋骨平均应力中包含了肋骨周向应力和附加弯曲应力两项,但是在计算中,仅用肋骨的周向应力表示了肋骨平均应力,对于初始缺陷造成的附加弯曲应力,没有考虑,致使计算结果较GL规范和有限元计算偏小。德国GL规范对于制造误差有相应的计算公式和测量方法,在计算中将肋骨应力细分成两部分考虑(压应力和弯曲应力),弯曲应力占到了肋骨应力的25.8%,比重较大,并通过两者的绝对值和来校核结构强度。
4)两国规范在壳板稳性的计算上和安全衡准方法上差别较大,CCS规范经过几何非线性和物理非线性修正使得许用应力较低。但对于大深度潜水器因其耐压壳材料采用高强度材料,耐压壳半径厚度比值小,耐压壳破坏压力的计算不能完全套用潜艇规范的修正系数。德国GL规范计及了材料弹性模量与应力之间的非线性关系,通过应力与材料比例极限大小的判断,在耐压壳弹性屈曲公式中引入非弹性段的材料切线模量Et和割线模量Es,从而考虑了材料非线性影响,因此算例中德国规范得到的应力未达到材料的比例极限,仍属于弹性范围。与CCS规范差别较大。在校核时德国GL规范并未区分几何非线性和物理非线性,而是计算得到的理论弹塑形临界压力乘以折减系数r大于计算压力即可。
5)在总体稳定性的计算上,两国规范基本上是一致的。理论临界压力的计算上,GL规范比我国规范偏高10.7%,主要是由于附连带板的取值引起的偏差,可以看出,我国规范取一档肋距为附连带板宽是偏危险的,而GL规范在半径的选取上考虑更全面。修正系数的选择上,GL规范是直接取为1.07,并把得到的结果就作为最大的允许工作压力,而CCS规范是经过两次修正之后的结果。CCS规范对总体稳定性的修正和校核准则较严格,使极限工作压力反而比GL规范小。
3 结论
1)德国潜器规范针对潜器的自身特点,对于不同下潜深度和工况定义了相应的安全系数和计算校核方法,计算非常全面细致,值得借鉴。
2)GL规范对于肋骨不圆度定义了相应的测量和计算方法,同时在肋骨校核中考虑了侧倾和焊接变形的影响,可为潜器设计提供借鉴。
3)深潜器更多采用复合材料,以提高材料利用率和降低重量,因此稳性问题更加突出。GL规范在壳板稳性校核中综合考虑几何非线性和物理非线性的影响,较为科学合理的。
4)欧美潜器规范和相应设计准则的分析方法能更好地适用于新材料,能够科学地体现大深度潜水器结构形式的特点。
[1]GERMANISCHER LLOYD.Calculation and Pressure Hulls under External Pressure[S].Hamburg,Germanischer Lloyd AktiengeseUschaft,1998.
[2]GERMANISEHER LLOYD.Rules for classification and construction,l-Ship technology,5-Underwater technology,1-Diving Systems and Diving Simulators[S].Hamburg,Germanischer Lloyd AktiengeseUschaft,2009.
[3]GERMANISEHER LLOYD.Rules for classification and construction,l-Ship technology,5-Underwater technology,3-Unmanned submersibles[S].Hamburg,Germanischer Lloyd AktiengeseUschaft,2009.
[4]中国船级社.潜水系统和潜水器入级与建造规范[S].北京:人民交通出版社,1996.
[5]中华人民共和国军用标准.潜艇结构设计计算方法[S].北京:国防科学技术工业委员会,2001.
[6]刘 涛.大深度潜水器耐压壳体弹塑形稳定性简易计算方法[J].中国造船,2001,42(3):8-14.
[7]GERMANISEHER LLOYD.Rules for classification and construction,l-Ship technology,5-Underwater technology,2-manned Submersibles[S].Hamburg,Germanischer Lloyd AktiengeseUschaft,2009.
