基于LabVIEW的运动控制卡对SINAMICS S120控制实现*
2013-06-09王永泉陈花玲徐亚明
张 浩,王永泉,陈花玲,徐亚明
(1.西安交通大学机械工程学院,陕西西安 710049;2.大连机床股份有限公司车床研究所,辽宁大连 116021)
基于LabVIEW的运动控制卡对SINAMICS S120控制实现*
张 浩1,王永泉1,陈花玲1,徐亚明2
(1.西安交通大学机械工程学院,陕西西安 710049;2.大连机床股份有限公司车床研究所,辽宁大连 116021)
介绍一种面向机床伺服进给运动控制系统的设计与实现。该系统基于LabVIEW虚拟平台丰富的函数库功能及其与硬件良好的接口性能,以GTS-400-PV-PCI-G型运动控制卡为核心,通过西门子扩展端子TM41提供的可模拟增量式编码器接口及模拟量输入接口,对西门子新一代产品SINAMICS S120单轴交流驱动器进行运动控制,从而实现对1FT6086伺服电机的实时控制。
运动控制;TM41;LabVIEW;动态链接库
1 引言
面向数控机床等机电产品的运动控制系统的设计正日趋模块化,即基本框架采用运动控制卡和工控机,外围设备采用符合接口标准的伺服驱动系统[1]。这种设计模式不仅通用性好、成本低且技术成熟、稳定性好,可有效缩短设计周期。笔者选用了西门子新一代产品SINAMICS S120伺服系统,正常情况下采用西门子公司配套生产的PLC对其进行运动控制,成本较高。本研究介绍一种采用固高GTS系列运动控制卡对西门子新一代产品SINAMICS S120伺服系统的运动控制方法。
2 伺服控制系统硬件组成
本项目的运动控制系统的上位控制器选用工控机,下位控制器则采用了运动控制器配合伺服驱动器的方式,由上位工控机对下位运动控制器发送控制命令[2],由下位运动控制器完成相关运算和运动控制,再由伺服驱动器按照命令驱动电机,完成定位操作,整个控制系统硬件连接示意图如图1所示。表1为搭建整套系统所需的主要硬件。
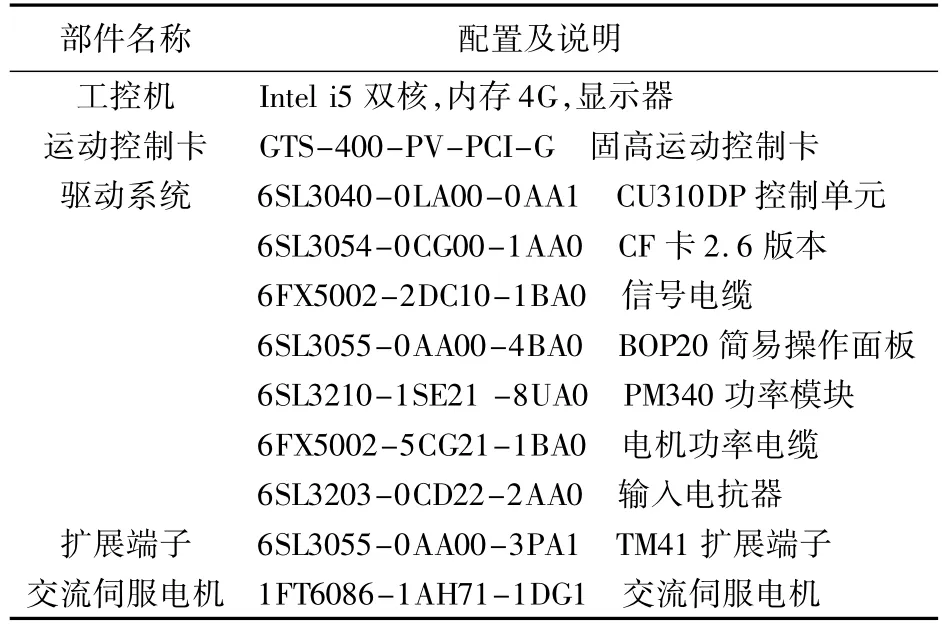
表1 控制系统的主要硬件
2.1 西门子SINAMICS S120驱动系统
本控制系统选用西门子SINAMICS S120单轴交流伺服控制器来完成伺服驱动功能。SINAMICS S120伺服驱动器(以下简称西门子S120)是西门子公司推出的新一代伺服驱动单元,它具有模块式设计的功能[3],并能够实现机动、灵活和高效的驱动控制,同时还可进行快速、可靠的安装与调试。它通过DRIVE-CLIQ通讯电缆进行数据连接,将V/F控制、矢量控制和伺服控制集于一体,可实现控制轴的绝对和相对定位,具有强大的定位功能,总体性能远远超过同类变频系统。
一套 S120伺服驱动器包括一个控制单元CU310DP和一个功率模块PM340,图2为该伺服驱动器及相关配件的电气接线示意图。
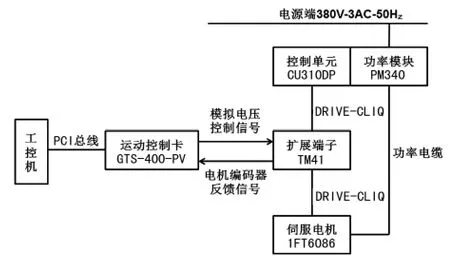
图1 控制系统硬件连接
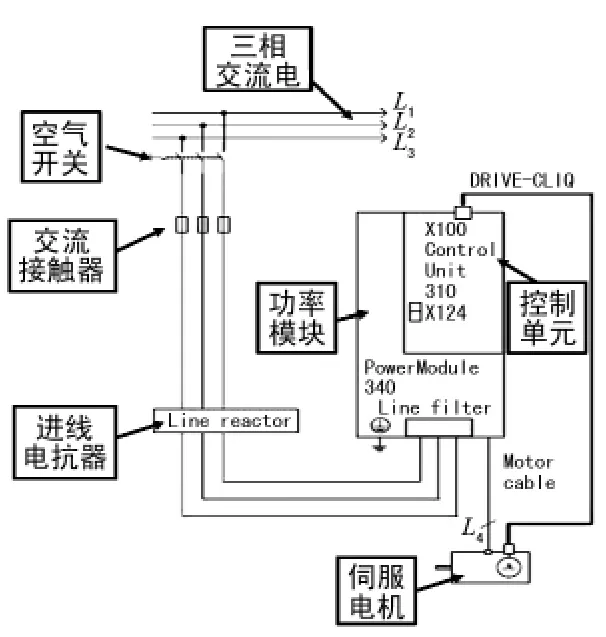
图2 SINAMICS S120伺服驱动系统接线图示
2.2 运动控制卡
运动控制卡选用固高公司生产的GTS-400-PVPCI-G板卡。该运动控制卡可以工作于脉冲模式或者模拟量模式,用户可根据需要进行选择。本控制系统选择模拟量控制模式,运动控制卡最大输出电压为±10 V,电压值的大小对应转速大小,符号对应转向。使用固高科技提供的 Motion Controller Toolkit 2008运动控制器管理软件能够方便地对系统硬件资源和软件资源进行组合,来完成对系统各个资源的基本属性配置[4]。
控制方式选择半闭环控制方式[5],控制系统的反馈取自伺服电机内置的增量式编码器,此控制方式可以补偿系统的控制指令误差,图3所示为系统半闭环控制方式的示意图。
2.3 运动控制卡与S120伺服系统接线
半闭环控制方式要求运动控制卡连接驱动器相对应的接口,具体包括运动控制器对伺服电机编码器反馈信号的读取及运动控制器输出的模拟电压控制信号两个主要部分,但驱动器控制单元CU310DP上并未设置相应的接口,导致运动控制器不能直接对CU310DP进行控制,所以在控制过程中需要中间扩展单元。在此选用西门子TM41扩展端子,TM41包括X520编码器接口和X523模拟输入端接口,其中X520编码器接口将伺服电机编码器信号反馈给运动控制卡,X523模拟输入端接口接受来自运动控制卡经过计算后输出的模拟电压控制信号,具体连线图如图4所示。
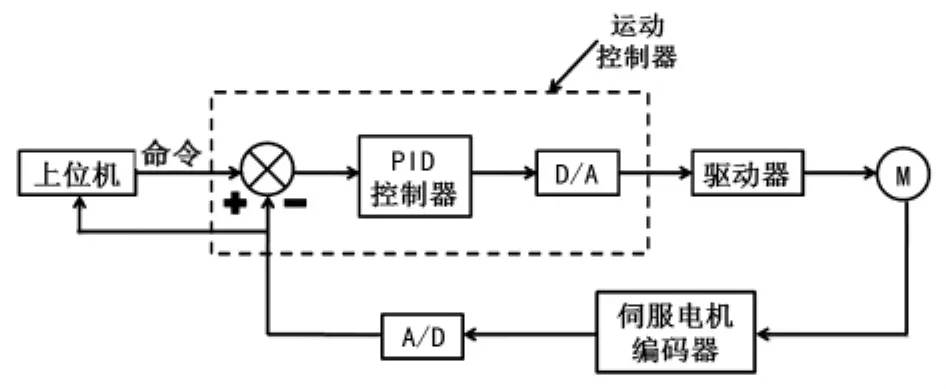
图3 半闭环控制方式示意图
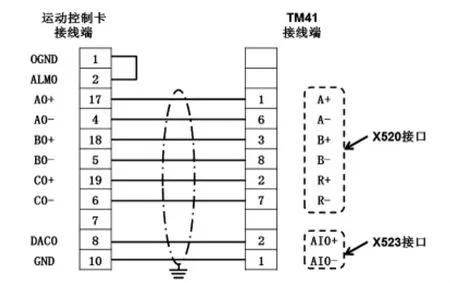
图4 运动控制卡与TM41接口连线图示
3 伺服控制系统的调试和配置
3.1 S120驱动系统的硬件组态与优化
上位机与S120的通讯方式有两种,DP通讯卡或RS232的连接方式,其中RS232通讯方式需上位机配有RS232接口,采用标准的RS232电缆,在西门子Starter调试软件中选定相应的串口通讯方式即可。在硬件接线正确情况下,在Starter软件中插入驱动装置后选择在线项目,本系统为集成DRIVE-CLIQ接口的电机,可通过自动组态的方式将电机与编码器等硬件的数据读出再通过软件进行控制调试[6]。
版本V2.5以上的SINAMICS S120为用户提供了自动优化功能(Automatic controller setting),通过自动优化功能可以识别电流环、正负向负载测量、自动设置速度环参数等,自动优化后可使伺服电机在更优的状态下进行工作。
3.2 扩展端子TM41的配置
在硬件连接及软件调试完毕之后,需要对TM41扩展端子进行配置才能完成对西门子S120伺服系统的运动控制,具体设置的步骤如下:
(1)TM41模拟输入(Analog Input)设置
TM41的模拟输入接口连接到SERVO_02轴的p1155参数,即转速控制参数,代表SERVO_02轴的转速控制来自外部的模拟电压输入,如图5所示,在图5中界面点击Scaling选项,可设置输入电压范围值,本系统输入电压范围为±10 V。
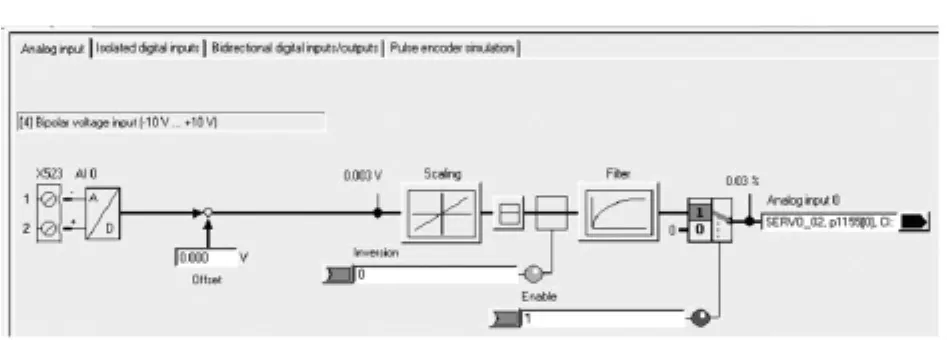
图5 TM41的X523接口设置
(2)TM41脉冲模拟编码器(Pulse encoder simulation)设置
TM41的Master Value接口连接到SERVO_02轴的r63参数,即转速实际值,TM41在读取到SERVO_ 02轴的转速之后可输出模拟增量式编码器信号,在此接口可读取符合RS422标准的运动控制卡能够读取的正交编码器信号,具体设置如图6所示。
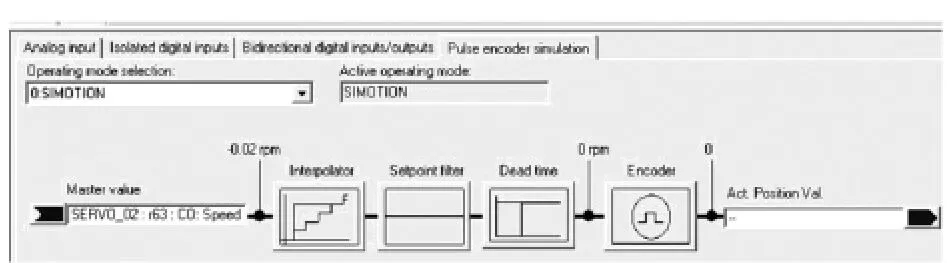
图6 TM41的X520接口设置
(3)TM41及SERVO_02轴的使能设置
在Starter软件中,参数 p840代表指令“ON/ OFF”,分别设置TM41及SERVO_02轴参数p840的信号源为TM41的X522数字量输入接口DI 0和DI 1,如图7所示,在DI 0和DI 1接通之后TM41及SERVO_02轴即处于使能状态。
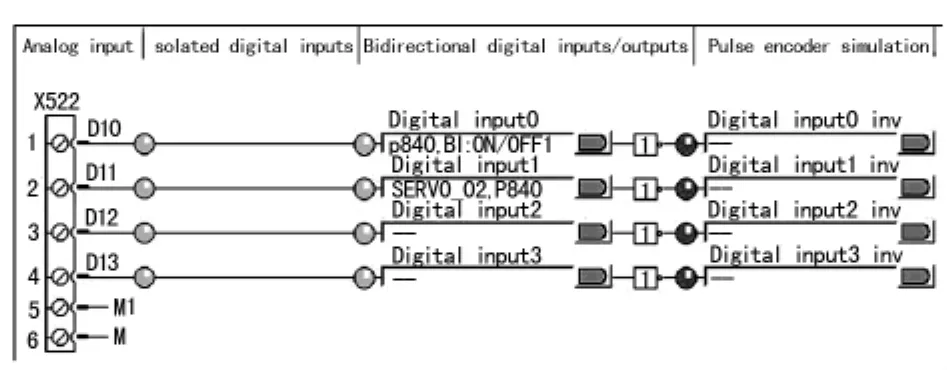
图7 TM41及SERVO_02轴的使能参数设置
即TM41参数设置完毕,可进行运动控制调试。
4 基于LabVIEW虚拟平台的运动控制程序
4.1 动态链接库(DLL)的调用
GTS-400-PV-PCI-G运动控制卡提供Windows系统环境下的动态链接库(Dynamic-Link-Library, DLL)[7],库中包含了对运动控制器读写的全部函数,针对LabVIEW调用DLL的特点和运动控制的复杂性,DLL中包含多个可供调用的函数。这些函数都调用运动控制函数库中的一个或多个函数,DLL中每个可供调用的函数都对应着某一具体任务,称其为功能函数。但由于LabVIEW为图形化编程环境,所以必须将动态链接库中的函数全部转换为在LabVIEW环境下可以使用的函数形式。
4.2 运动控制程序实现
本系统选用的运动控制卡可以对伺服电机的运动轨迹进行不同类型的规划,采用模拟量控制模式,可进行T形曲线和S形曲线或电子齿轮模式等运动方式,设置运动中的PID参数[8],采用固高科技有限公司GTS系列运动控制器和LabVlEW调用DLL进行电动机运动轨迹编程控制,调用固高科技有限公司开发的函数库,完成对电动机不同规划轨迹的控制功能。如图8所示为使用LabVIEW2011软件编写的伺服电机速度T形曲线运动控制程序。
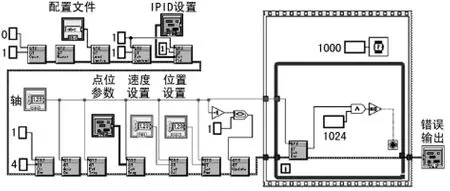
图8 采用LabVIEW编写的速度T形曲线控制程序
5 结语
本控制系统已成功应用于滚珠丝杠副综合性能测试试验台,现已正常运行并可投入生产。实践表明此控制系统稳定性和可靠性较高,能准确实现对伺服电机的实时控制。
[1] 朱晓明,徐 岩,齐海龙,等.四轴转台系统软件功能设计[J].机床与液压,2010,38(8):78-80.
[2] 崔 延,张筱云.基于GT运动控制卡的数控雕刻机系统研究[J].机械研究与应用,2011(5):130-132.
[3] 郁林聪,吴 达.基于SINAMICS S120的变速器试验台加载控制系统设计[J].制造业自动化,2010,32(10):219-220.
[4] 固高科技(深圳)有限公司.GTS系列运动控制器编程手册[Z].2011.
[5] 刘彦鹏.运动控制新技术及应用[J].装备制造技术,2009(8): 124-126.
[6] 西门子(中国)有限公司.SINAMICS S120调试手册[Z].2010.
[7] 龙华伟,顾永刚.LabVIEW8.2.1与DAQ采集[M].北京:清华大学出版社,2008.
[8] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2005.
Realization of Motion Control for SINAMICS S120 Using Motion Control Card Based on LabVIEW
ZHANG Hao1,WANG Yong-quan1,CHEN Hua-ling1,XU Ya-ming2
(1.School of Mechanical Engineering,Xi'an Jiaotong University,Xi'an Shanχi 710049,China;
2.Institute of Lathe,Dalian Machine Tool Group Crop,Dalian Liaoning 116021,China)
The design and implementation of a kind of general motion control system towards machine tool is introduced.The system is based on the rich function library and a good performance of interface with hardware of LabVIEW virtual instrument.Using Googol's GTS-400-PV-PCI-G type motion control card as the core,through the expansion terminals TM41 of Siemens which can provide simulated incremental encoder interface and analog input interface,enabling the motion control for new generation of products for Siemens SINAMICS S120 single-axis AC drives,then the real-time control of 1FT6086 servo motor is realized.
motion control;TM41;LabVIEW;DLL
TH12
A
1007-4414(2013)05-0171-03
2013-07-29
“高档数控机床与基础制造装备”科技重大专项;“CL/DL系列中高档数控车床滚动功能部件应用示范工程”资助(编号: 2012ZX04011022)
张 浩(1989-),男,辽宁阜新人,在读硕士,主要从事对滚珠丝杠性能测试方面的研究工作。