基于运动控制器的雷达转台控制系统设计
2013-06-08陈立坡王雷
陈立坡,王雷
(92785 部队,河北 秦皇岛 066200)
0 引言
传统雷达多以手动传动为主,其控制精度、控制速度、稳定性和可靠性已经很难满足现代控制的要求。随着新控制技术的进一步发展,采用数字控制技术的伺服系统已经是大势所趋[1]。
本文设计的控制系统采用雷赛公司的SMC6490作为控制器。它基于10/100 M 以太网的通用型独立式运动控制器,可支持多个控制器和PC组成的网络控制。该控制器有单路手轮信号输入,并提供非隔离电源。本文主要介绍了基于控制器SMC6490 控制系统的实现方法,为了保证每次运动具有相同的起点,添加了开机回零功能;为了保证每次运动不超出其工作空间,添加了左右两个限位开关,转台碰到限位开关时,运动立即停止,更好地保护了转台。
1 系统工作原理
本系统的基本组成如图1所示。上位机(控制计算机)发送运动控制指令,运动控制器把该指令“翻译成”交流伺服电机脉冲加方向的控制指令,准确地控制电机的运动。通过交流伺服电机的编码器反馈与上位机控制指令进行比较,作为整个系统的闭环反馈控制。手摇脉冲发生器通过给运动控制器发出脉冲指令,控制电机运动。在控制转台上安装了两个限位开关,当转台触发限位开关时,控制器停止电机运动,以免发生事故。
2 系统的基本组成

图1 伺服控制系统基本原理
本控制系统的核心部分是控制器SMC6490,采用松下交流伺服电机作为其驱动部分,下面对其主要元件进行简单介绍。
2.1 SMC6490 控制器
SMC6490 基于嵌入式处理器和FPGA的硬件结构,插补算法、脉冲方向信号的输出、自动升降速处理、原点及限位等信号的检测处理,均由硬件实现,确保了高性能运动控制的高速、高精度及系统的稳定。通过简单的编程设定即可开发出稳定可靠的高性能连续轨迹运动及控制系统。
SMC6490 系统结构框图如图2所示。除了4个电机控制端口外,还提供了丰富的I/O 接口和通讯接口:四轴编码器接口,双路PWM 控制输出,16 路隔离输入口,8 路隔离输出口,其中有两路电流增强输出,并通过扩展接口扩展更多的IO 接口;一个10/100 M 网络接口、两个RS232,可通过网络或RS232 直接与PC 机通信;同时还可以通过RS232 连接其他设备,如文本屏、触摸屏,作为输入输出界面。

图2 SMC6490 系统结构框图
2.2 松下交流伺服电机、驱动器
本控制系统采用松下交流伺服电机作为其驱动成分。一般情况下,交流伺服电机有3 种控制方式:位置、速度和转矩控制方式。位置:位置控制方式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度;速度:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制;转矩:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小。为了保证其控制精度,通常采用位置控制方式。交流伺服电机、驱动器位置控制方式配线图如图3所示。

图3 位置控制方式配线图
在转台的伺服驱动上,可以选择手轮控制和自动控制两种方式。当按下手轮使能开关时,此时手轮输入为主,控制电机运动,自动控制功能关闭。自动控制又分为输入目标控制和GPS 引导控制两种,通过控制界面的选择可达到不同控制方式的目的。手轮定义见表1。

表1 手轮定义表
3 系统的软件设计
本控制系统是使用VC 软件开发的,主要完成以下几部分功能:
(1)上位机与控制器建立通信 上位机与控制器是通过网口通信的,每次上电完毕后都要检查通信是否成功;
(2)参数的设置 由于转台工作环境可能大声变化,因此其参数也要发生变化,比如经纬度、最大转速、最小转速等;
(3)自动控制和手轮控制的选择 自动控制是指当输入目标的方位后,转台能够自动跟踪目标,并且增加了手轮控制功能;
(4)回零功能为了保证每次转台运动具有共同的起点,添加回零功能;
(5)限位功能为了保证每次运动不超出其工作空间,添加了左右两个限位开关;
(6)屏幕显示 用VC 制作了一个软件控制界面,用来显示转台的运动控制状态,比如实际转速、转角等等。
软件控制流程图如图4所示,软件控制界面见图5。
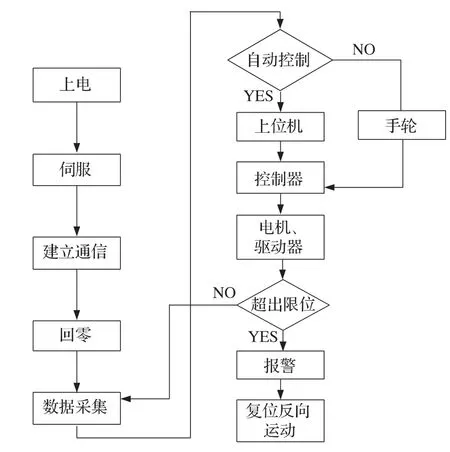
图4 软件系统流程图

图5 软件控制界面
系统上电成功后,首先与控制器建立通信(上位机与控制器通过网口连接),通信成功以后左边的状态监测中指示灯通信中会变成绿色。然后进行转台的回零运动,找到系统的原点。转台有两种控制方式,手动控制和自动控制。当选择手动控制,通过点击正向、负向按钮实现转台的转动方向;当选择自动控制时,自动接收目标位置的GPS信息,实现转台实时跟踪、实时控制。界面的右下方为速度系数调整栏,实现对转台转速快慢的调解。
4 GPS 引导控制
本控制系统可以自动跟踪目标,通过网络实时传输目标的GPS信息,做到实时跟踪。建设转台架设位置的经纬值为(B1L1H1),目标位置的经纬值为(B2L2H2)。要得到以转台为坐标原点目标位置的直角坐标,具体转化流程图如图6所示。
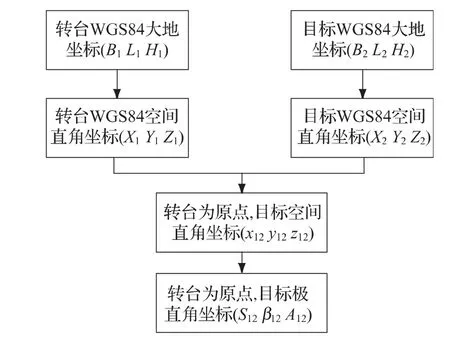
图6 GPS 引导数据坐标转化流程图
5 结束语
本文介绍了转台控制系统设计的过程及其具体实现的方法。该系统以雷赛运动控制器为核心,具体论述了其工作原理和实现方法。对于控制界面的设计,从任务角度设计了两种控制方式:手动控制和自动控制,不同的工作状态可以采取不同的工作方式。
[1]曹正才.基于DSP的舰载雷达转台控制系统的设计[J].雷达与对抗,2005(2).
[2]高钟毓.机电控制工程[M].北京:清华大学出版社,2001.
[3]Panasonic 使用说明书.
[4]张勇.C/C++语言硬件程序设计[M].西安:西安电子科技大学出版社,2003.
