基于多模型切换的阶梯式广义预测控制器
2013-06-07王振雷李小田王昕
王振雷,李小田,王昕
(1.华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海200237;2.上海交通大学电工与电子技术中心,上海200240)
基于多模型切换的阶梯式广义预测控制器
王振雷1,李小田1,王昕2
(1.华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海200237;2.上海交通大学电工与电子技术中心,上海200240)
针对一类模型参数跳变系统,提出一种基于多模型切换的阶梯式广义预测控制算法.该算法采用多个固定模型和两个自适应模型并行辨识系统的动态特性.多个固定模型用以提高系统的暂态性能,可重新赋初值的自适应模型用以消除系统的稳态误差,常规自适应模型用以保证系统的稳定性.在每个采样时刻基于切换性能指标得到最优的局部模型,实现系统的全局控制.最后给出了全局稳定性证明及收敛性分析.仿真结果表明:控制效果明显优于单一模型的广义预测控制器.
多模型;阶梯式控制;广义预测控制;自适应
GPC(广义预测控制)是随着自适应控制的研究而发展起来的一种预测控制算法[1-2].由于将滚动优化与自适应相结合,采用参数模型,因此系统设计灵活,具有良好的控制性能和鲁棒性,非常适用于不确定[3]、时变[4]、时滞[5]等复杂工业过程.
在实际的工业控制中,往往出现模型参数随工况变化发生显著时变的情况,特别是在大工况系统下,由于系统的建模与辨识十分复杂,实际工业过程的精确全局模型很难建立,所以单一的广义预测控制器往往难以满足实时性的要求[6].多模型的方法是一种针对系统动态特性随工况变化的复杂工业工程控制的有效方法[7],不少学者将多模型方法与预测控制方法相结合,即通过在典型工况点建立多个局部模型并分别设计相应的子预测控制器,而后按一定的加权或切换策略得到全局的控制输出,已在较多领域取得了不错的控制效果[8].文献[9]通过神经网络、文献[10]采用模糊策略建立系统的多模型集,但在模型参数分散或被控对象已知信息较少的情况下,为达到较高的控制精度,必然使用大量的子模型.而子模型数量过多必然会导致计算量过大,对硬件设备的要求也会迅速提高.为减小计算量,文献[11]等提出一种基于SVM的在线优化方法,实时的缩减了子模型的数量.文献[12-13]采用分层递阶、逐维定位技术减少模型数量.但上述方法仅仅减少模型数量,未降低单个子控制器的计算量.而对于广义预测控制器,当控制步长较大时,子控制器在高维矩阵求逆时需要大量运算,并可能出现数值病态问题.为此,文献[14]将阶梯式策略引入到局部广义预测控制器中,不仅不需要矩阵求逆,大大减小了计算量,而且通过对控制增量的约束,防止了控制量的剧烈变化,非常适用于实际的工业过程控制.但上述方法根据负荷建立多模型,无法消除系统的稳态误差,而且缺乏稳定性和收敛性的分析,不利于实际过程推广.
考虑到上述不足,本文提出了一种基于多模型切换的阶梯式广义预测控制器.该控制器采用多个固定模型、一个常规自适应模型和一个可重新赋初值自适应模型构成.多个固定模型用以提高系统的暂态性能,可重新赋初值的自适应模型用以消除系统的稳态误差,常规自适应模型用以保证系统的稳定性.然后在每个采样时刻根据系统的切换性能指标,选出最优的局部控制器的输出作为当前的最优预测控制器,实现控制.最后给出了输入输出稳定证明及收敛性分析.仿真结果表明该方法优于单一模型的广义预测控制算法.
1 被控对象描述
被控对象可用如下模型描述:

式(1)中,y(k)、u(k)分别为系统的输出、输入;Δ=1- z-1为差分算子;d为系统时延;A( z-1)、 B( z-1)为关于后移算子z-1的多项式:
式(1)可变换为:

式(2)中

2 基于多模型切换的阶梯式广义预测控制系统设计
多模型系统由m个参数已知的固定模型Mi(i=1,2,…m),一个常规的自适应辨识模型Mm+1以及一个可赋初值的自适应辨识模型Mm+2组成.m个固定模型可以提高系统的暂态性能;自适应模型的在线参数辨识可以消除稳态误差,保证系统的稳定性;可赋初值的自适应模型则进一步提高系统的暂态性能,增加系统的快速性.
2.1 多模型集的建立
若把模型参数与数据参数用向量形式记为

可得到式(2)的向量表示

由式(3)可以得到多模型集的向量表示

式(4)中,当i=1,2,…,m时,θi( k)为一固定值;当i=m+1时,为常规自适应模型;当i=m+2时,为可赋初值的自适应模型.其模型参数可采用如下的投影算法进行辨识[15]

式中,α(t )为一变化的实数,其变化范围为0<α(t)<2.
2.2 局部控制器的设计
在本文中,选用阶梯式广义预测控制器作为子控制器.阶梯式广义预测控制器在广义预测控制器的基础上引入阶梯式控制策略,不但降低了计算量(不用对矩阵求逆),而且通过对控制增量的约束,使控制量的变化柔和,提高了系统的鲁棒性,非常适合应用于复杂的工业过程[16-17].
采用阶梯式策略,令


式(8)中,W(k+j)为未来期望输出向量;N为优化时域;Nu为控制时域;λ(j)为控制加权系数序列.
引入如下的两个丢番图方程

式(9)、式(10)中
利用式(2),(7),(9),(10)可以求得式(8)的最优值

式(11)中

2 . 3控制器的切换
对于多个局部控制器,可采用如下的切换性能指标
式(1 7)中,为第i个模型在k时刻的输出误差;在k时刻,根据性能指标最小值切换到相应的局部控制器.设s为k时刻使性能指标最小的控制器,则有

3 稳定性和收敛性分析

定理1:如果系统满足假设条件,本文提出的多模型阶梯式广义预测控制器作用于被控对象(2)时能保证闭环系统的输入输出有界稳定,并且广义跟踪误差有界收敛.
证明:
(1)当ei( k)≠0(, i=1,2,... m)时,意味着所有参数已知的固定模型无法保证被控系统的收敛性,那么一定存在不为零的最小误差ε(k ),即ε而由引理2可知自适应模型具有收敛性,即一定存在一有限时刻T,当T<k时,有

此后模型间的切换仅在两个自适应模型间进行,设i为系统选择的最优控制器(i=m+1,m+2),由切换性能指标最小可知

由引理2(1)可知

根据夹逼准则,可知

j的系数在任意时刻是有界的,并且丢番图方程有唯一解,可知多项系数同样有界.由引理2及引理3可知,K充分大时,系统的输入输出动态方程(18)中的Γi( i =1,2,...6)项均趋于零.而由式(14)可知,此闭环系统任意接近一个稳定系统.

由的定义及式(23)、(24)可知,存在正常数C5,C6,使得

由式(25)可知,φ(k)的有界性由e(τ)的有界性确定.下面证明e(τ)的有界性
假设e(τ)是无界的,则对任意给定的一个正数n,有
显然,其与式(22)矛盾,因此假设不成立,故e(τ)有界,φ(k)有界,闭环系统输入输出有界.
收敛性:由式(22)及φ(k)有界可知
由式(18)可知系统的广义跟踪误差
(2)当ei(k)=0,(i=1,2,…,m)时,则意味着固定模型Mi的参数使得Ji(k)=0最小,多模型控制器退化为一固定参数控制器.显然,由式(2)、(12)、(14)可知闭环系统输入输出有界;由式(15)可知广义跟踪误差为零.
综上所述,无论控制器如何切换,此算法均可保证闭环系统输入输出有界,同时使得最终的广义跟踪误差为零.
4 仿真研究
被控系统可表示如下

系统的延迟d=2,a1=-2,a2=1.1,b0=1.2,b1=2,系统参考输入取为一幅值为10的方波信号.在100步时,参考输入发生变化;在200步时系统模型参数跳变为a1=-0.8,a2=-1.5;在300步时,参考输入和模型参数a1=1.2,a2=0.5同时发生变化.设计一单模型自适应GPC控制器,取其模型参数初始值均为0.01,得到其输出量及控制量变化轨迹如图1所示.
在设计多模型系统时,常规自适应模型及可赋初值的自适应模型初始值也取为0.01.对于固定模型集,可令,得到8个固定模型.其输出量及控制量变化轨迹如图2所示.
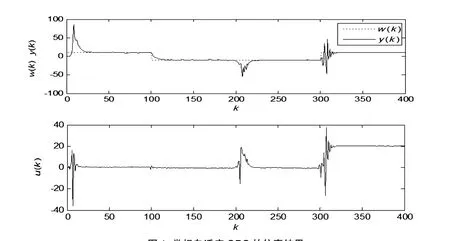
图1 常规自适应GPC的仿真结果Fig.1 Simulation resultsof traditionaladaptiveGPC
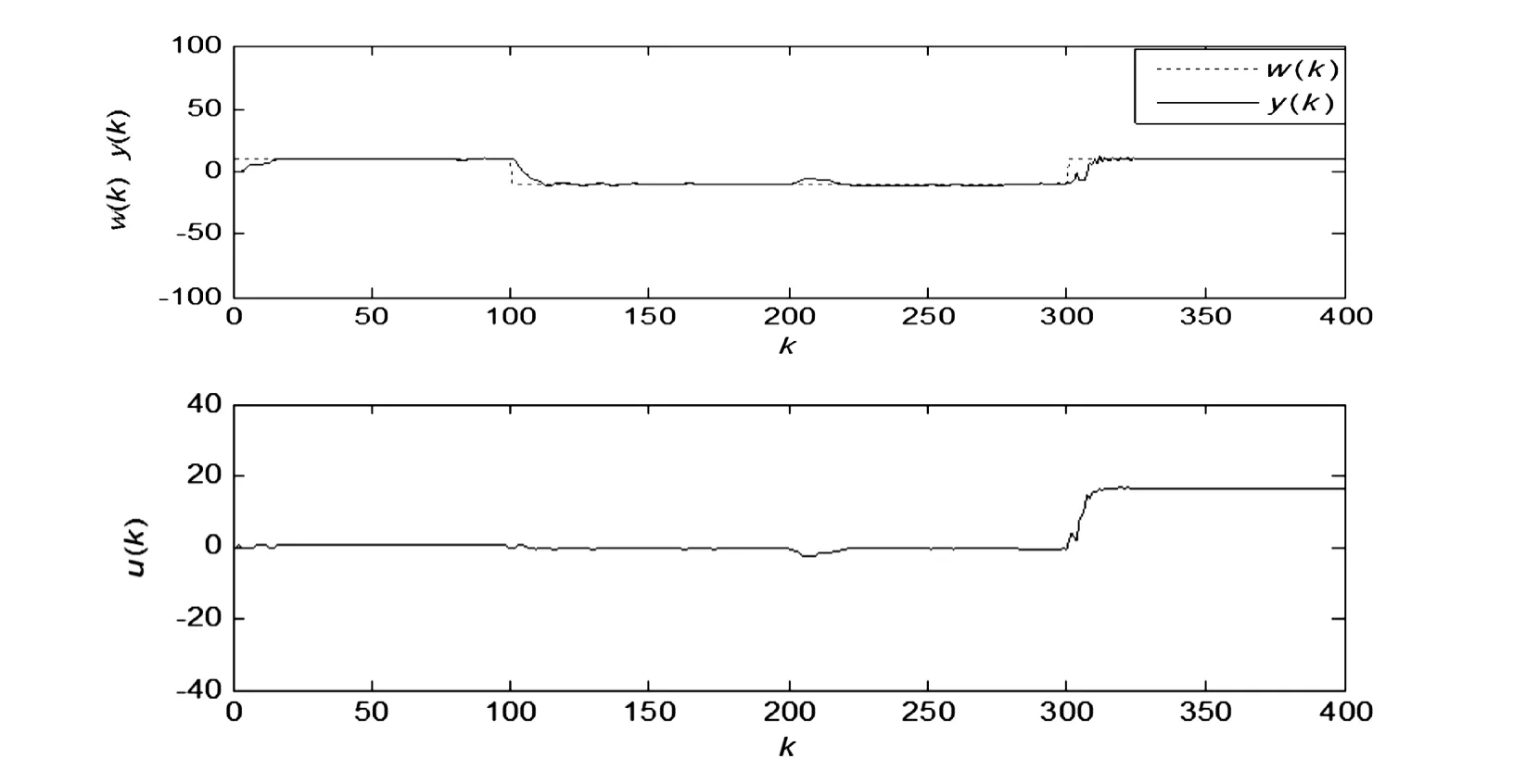
图2 多模型阶梯式GPC的仿真结果Fig.2 Simulation resultsofstair-likeGPCbased onmultiplemodels
由图2可知,不论是单模型自适应GPC还是本文采用的多模型阶梯式GPC都能保证系统输入输出有界;在达到稳态前,图2的暂态性能明显优于图1;在参考轨迹或模型参数变化后,图2具有更好的暂态性能及调节能力.
5 结论
针对一类模型参数跳变的系统,本文提出一种基于多模型切换的阶梯式广义预测控制方法,并给出了稳定性证明和收敛性分析.通过建立多个固定模型和两个能动态辨识系统模型参数的自适应模型,提高了系统的暂态性能和模型参数跳变后的自动调节能力;采用阶梯式的策略,不但减小了计算量,而且通过对控制增量的约束,保证了控制量变化的平滑性,利于实际工业过程中的实时控制.最后的仿真结果进一步验证了此方法的有效性.
[1]Clarke DW,MohtadiC,TuffsPS.Generalized predictive control-part I:The basic algorithm[J].Automatica,1987,23(2):137-148.
[2]Clarke DW,Mohtadi C,Tuffs P S.Generalized predictive control-part II:Extensions and interpretations[J].Automatica,1987,23(2):149-160.
[3]Moelbak T.Advanced control of superheater steam temperatures-an evaluation based on practical applications[J].Control Engineering Practice,1999,7(1):1-10.
[4]Olafur PP,Henrik M,Henning T.Sogaard.Generalized predictive control fornon-stationary systems[J].Automatica,1994,30(12):1991-1997.
[5]Kwok K E,Sirish LS,Clanachan A S,etal.Evaluation ofa long-rangeadaptive predictive controller for computerized drug delivery systems[J].IEEE transactionson biomedicalengingeering,1995,42(1):79-86.
[6]张智焕.复杂系统预测控制算法及其应用研究[D].杭州:浙江大学,2002.
[7]席裕庚,王凡.非线性系统预测控制的多模型方法[J].自动化学报,1996,22(4):456-463.
[8]Roderick M S,Tor Aille J.Multiplemodelapproaches tomodelingand control[M].London:Taylorand Francis,1997.
[9]Chen Q H,Quan J,Xia JJ.Neural network based multiplemodel adaptive predictive control for teleoperation system[J].Lecture Notes in Computer Science,2007,4491:64-69.
[10]Mazinan A H,SadatiN.Fuzzy predictive controlbased multiplemodels strategy for a tubular heatexchanger system[J].Applied Intelligence,2009,33(3):247-263.
[11]刘鲁源,吕伟杰,牟世忠.基于在线优化的切换多模型自适应控制[J].控制与决策,2002,17(4):407-410.
[12]王昕,李少远.参数跳变系统的分层递阶多模型自适应前馈解耦控制器[J].控制与决策,2005,20(1):17-22.
[13]王昕,杨辉,李少远,等.非最小相位逐维定位多模型自适应解耦控制器[J].控制与决策,2009,24(2):206-211.
[14]弓岱伟,孙德敏,郝卫东,等.基于多模型切换阶梯式广义预测控制的电站锅炉主汽温控制[J].中国科学技术大学学报, 2007,37(12):1488-1493.
[15]Wang X,Yang H,Zhang Y H.Multivariable direct adaptive decoupling controller usingmultiplemodels and a case study[J]. ScienceofChina Series F,2009,52(7):1165-1176.
[16]Wu G,Peng LX,Sun DM.Application of stair-like generalized predictive control to industrialboiler[C]//Industrial Electronics, 1992,Proceedingsof the IEEE InternationalSymposium.Tucson,Arizonal:[s.n.],1992:218-221.
[17]薛美盛,孙德敏,吴刚.火电厂锅炉主蒸汽压力的阶梯式广义预测控制[J].中国科学技术大学学报,2002,32(6):685-689.
[18]Goodwin GC,Ramadge PJ,Caines PE.Discrete-timemultivariable adaptive control[J].IEEE Transactionson Automatic Control, 1980,25(3):449-456.
[19]Chen L J,Narendra K S.Nonlinear adaptive control using neural networks and multiple models[C]//Proceedings of the American ControlConference,2001:4199-4203.
(责任编辑:卢奇)
Stair-like generalized predictive controller based on multip lemodels sw itching
Wang Zhenlei1,Li Xiaotian1,Wang Xin2
(1.Key Laboratory ofAdvanced Controland Optimization for Chemical Processes,EastChina
University ofScienceand Technology,Shanghai200237,China;2.Centerof Electrical&Electronic Technology,Shanghai Jiao TongUniversity,Shanghai200240,China)
To dealwith a system with jumping parameters,a stair-like generalized predictive control algorithm based on multiple models switching is adopted.Multiple fixed models and two adaptive models are established to identify the dynamic characteristic of the system in paralle1.Multiple fixed models are used to improve the transient performance,while the re-initialized adaptive model can eliminate the steady-state error,the conventional adaptive model ensure the stability of the system at the same time.At each sampling time,the stair-like generalized predictive controller is designed based on the bestmodel which is selected according to the switching index.Then,the global control is achieved.Finally,the stability and convergence analysis are also given.Compared with the convenient single model generalized predictive controller,control effectof the proposed method above is better.
multiplemodels;stair-like control;generalized predictive control;adaptive control
TP273
A
1008-7516(2013)03-0101-08
10.3969/j.issn.1008-7516.2013.03.021
2013-05-18
国家高技术研究发展计划重点项目(2007AA041402);高等学校学科创新引智计划项目(B08021);上海市重点学科建设项目(B504)
王振雷(1975-),男,山东德州人,博士,教授.主要从事复杂过程建模与优化、故障诊断研究.