开关磁阻电机的三维有限元分析
2013-06-01熊春宇王艳芹吴春梅李欣欣
熊春宇 王艳芹 吴春梅 李欣欣
(大庆师范学院物理与电气信息工程学院,黑龙江 大庆 163712)
0 引言
目前,二维有限元分析在开关磁阻电机的磁场计算过程中得到了广泛应用。但受到理论知识不足的影响以及硬件条件的限制,很少有对开关磁阻电机整个场域进行三维有限元分析的研究。二维有限元分析在搭建模型时采用分步建模,这会存在一定的误差,不具有通用性。同时,由于模型简化带来的误差,对计算值也有较大的影响[1]。本文采用的三维建模方法正是基于整体建模的方法,利用三维有限元数值进行分析计算,可以准确描述开关磁阻电机的端部磁场效应,使磁场的计算更为精确。
1 三维有限元与二维有限元的比较
二维有限元分析对计算机硬件环境要求不高,计算速度较快。在对端部效应要求不严格的情况下,该方法也能基本满足有限元分析的要求;而且与解析法相比较,该方法所得到的结果也较为理想,在电磁场分析中也得到了一定的应用。二维有限元在研究时忽略了端部磁场效应,而当转子在极对槽的位置附近时端部磁场效应是比较严重的。由端部磁场效应引起的误差可能会达到33%左右,这种误差在一些要求较高的电磁计算中是不能被忽略的。采用二维计算时,只能计算绕组的平面有效部分,而无法计算端部特性和端部漏感,从而无从考虑端部效应对电感和转矩等电机参数的影响。解决以上这些问题的有效方法就是采用三维有限元数值计算[2]。
2 开关磁阻电机的三维电磁场分析
由于开关磁阻电机在不对齐位置下端部的磁场非常严重,要精确计算电机的磁链特性,就必须采用三维有限元分析法[3]。虽然三维有限元方法早在1980年就用于电机的磁场计算,但长期以来,广大研究人员仍采用二维有限元计算,然后再用修正系数补偿端部磁场的计算误差[4]。其根源在于三维有限元分析对计算机硬件环境要求很高,且三维电磁场分析有限元软件不易获得。
本文采用有限元分析软件ANSYS,完成开关磁阻电机的三维有限元分析。
2.1 三维有限元模型
本文对一台3 kW、四相(8/6极)开关磁阻样机进行三维有限元分析,电机结构尺寸如表1所示。

表1 样机结构尺寸Tab.1 Structure sizes of the prototype
根据样机的结构参数,建立的开关磁阻电机三维有限元模型如图1所示。

图1 三维有限元模型Fig.1 Three-dimensional finite element model
2.2 基本假设
考虑到三维有限元分析的基本原理及求解方式,再结合电机的实际结构,在进行三维有限元分析前,作如下基本假设[5]。
①单位长度的导线上,电流处处相等;
②电机定转子及转轴的材料磁化曲线是单值函数;
③不考虑电机轴,且认为电机外壳和电机轴不会产生漏磁;
④忽略轴承及轴承室的影响,整个电机轴具有相同的直径。
2.3 数学方程
在三维计算中,采用标量磁位φ对开关磁阻电机进行有限元分析。这里引入一个新的概念“跑道线圈”,它可以作为一个特殊的单元,区别于电机剖分单元。采用跑道线圈来表示电流源,对电机施加载荷[6]。这样做的好处是在有限元模型剖分时,不必考虑电流源的作用,而是把它当作剖分模型以外的部分。对于无源静态磁场,可以将麦克斯韦方程写成如下形式:

在电机定转子极部和轭部,磁场可用磁标量ψ表示为:

假设在铁磁材料与空气的交界处有A、B两点,在这两点处的磁标量可表示为:

所求得的整个场域上边值问题为:

式中:Ω1、Ω2分别为电机内外圆周表面。
采用三维有限元分析,在进行有限元剖分之前,需要确定剖分对象的形状函数。考虑到计算机硬件环境的限制以及剖分的效果,本文采用四面体单元进行分析求解[7]。四面体剖分单元如图2所示。
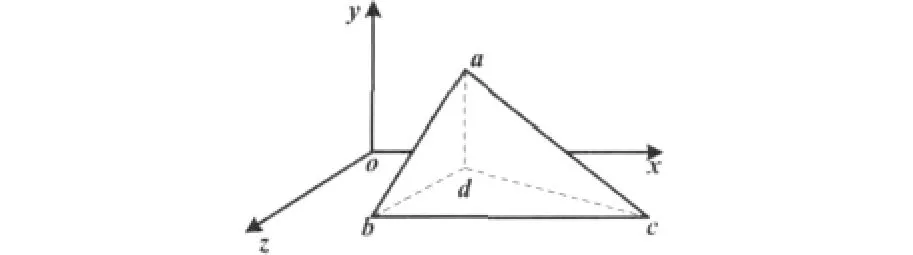
图2 四面体剖分单元Fig.2 Tetrahedralization split unit
四面体单元由四个三角形构成,单元的四个节点分别用a、b、c、d表示,并按照右手螺旋关系编号。四面体单元内任一位置的磁位ue为x、y、z的线性函数,可表示为:

设节点 a、b、c、d 对应的坐标分别为(xa,ya,za)、(xb,yb,zb)、(xc,yc,zc)、(xd,yd,zd),对应的磁位分别为,则有:
由式(6)可得 α1、α2、α3和 α4,并将结果代入式(5),可得:

式中:k=a,b,c,d。
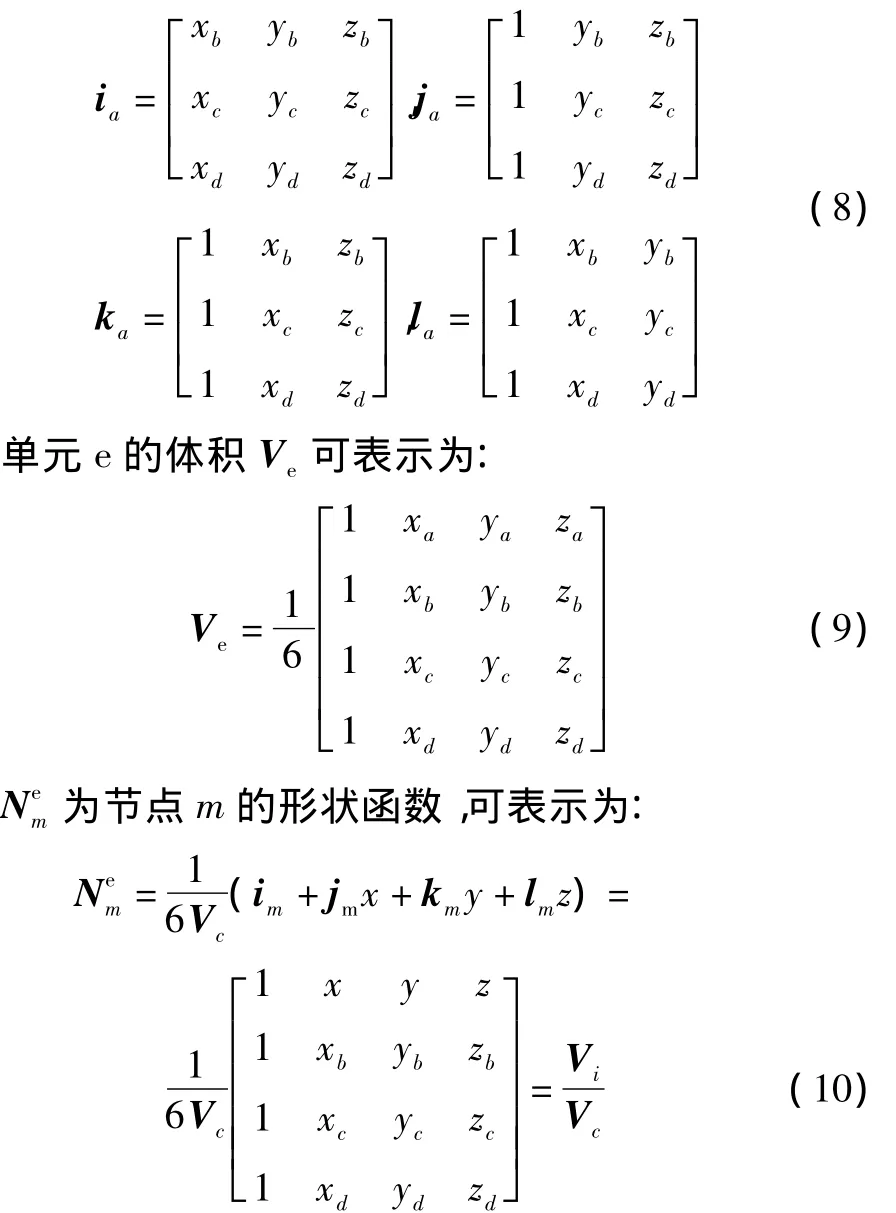
式中:x、y、z为单元e内P点的坐标;Vc为P点和面bcd所组成的子四面体的体积。

式中:Vb为P点和面acd所组成的子四面体的体积;Vc为P点和面bcd所组成的子四面体的体积;Vd为P点和面abc所形成的子四面体的体积。
3 三维有限元分析的前处理
三维有限元分析包括电机模型的建立、单元类型定义、模型赋材质和网格划分[8]。
在三维模型的建立过程中,需要考虑铁心的长度(取为0.18 m)。本文采用图形用户界面(graphical user interface,GUI)方式对电机整体建模。当电机位置角θ=30°时的三维模型如前文图1所示,经搭接后,将各实体之间的缝隙消除,实现真正意义上的相关联。
本文采用的三维剖分单元是SOLID98四面体单元,该四面体有10个节点。SOLID98单元不用设置实常数,模型中的材料区域包括空气、铁磁材料和绕组,其中,通电线圈采用ANSYS提供的跑道线圈。三维分析中定义的材料参数如下。
①空气区的相对磁导率为1.0;
②铁磁材料的B-H曲线根据厂家提供参数取近似单值函数;
③绕组部分统一分配,相对磁导率为1.0。
对电机赋完材质后的模型如图3所示。其中,图3(a)为最大电感位置即θ=30°时的模型,图3(b)为最小电感位置θ=0°时的模型。将赋完材质的所有实体用粘接(GLUE)命令融合到一起,使各实体边界融合,以满足第二类边界条件。

图3 三维赋材质模型Fig.3 Three-dimensional material model
由于三维网格划分对计算机硬件环境要求较高,在确保计算准确度的同时,减小工作量,采用适当的精确度剖分实体模型,所得三维网格剖分示意图如图4所示。
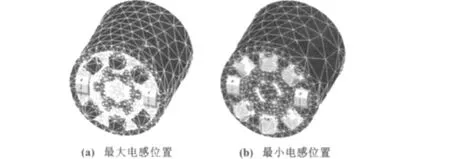
图4 三维网格剖分示意图Fig.4 Three-dimensional mesh split
从图4可以看出,在定转子极间气隙处,网格划分较密;而在其他部分,由于饱和现象不严重,剖分单元较大。跑道线圈是一个独立的基元,不进行网格划分。在剖分时可以忽略跑道线圈的存在,它对剖分结果无任何影响,只需在电流起作用的情况下考虑即可。
4 边界条件及载荷
三维有限元分析的求解区域是完整的电机模型。对整个立体圆周进行研究时,只考虑满足第一类边界条件,忽略第二类边界条件,计算可得在与磁力线垂直的磁标量位MAG=0。采用GUI或宏命令FMAGBC施加力的标志与二维分析的情况相同,它们均将转子定义为组件,并标志力和力矩。
在三维有限元分析过程中,引入了磁标势的概念。这时将电流源作为一个特殊的单元处理,它与电机的模型是两个独立的部分,定义电流源的单元属性为SOURCE36。这样做的好处是使电流源的作用不受电机模型的影响,易于建立电机模型,并便于施加载荷。跑道线圈的示例图如图5所示。
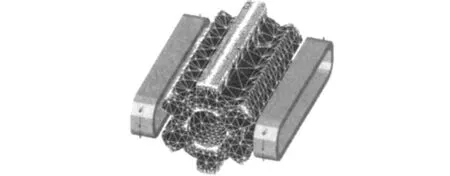
图5 跑道线圈Fig.5 Racetrack coil
“跑道线圈”考虑了电机定子绕组的端部效应,充分反映了电机绕组的实际结构。
5 三维有限元分析的求解
采用三维有限元方法分析静态磁场时,通常采用磁标势法[9]。磁标势法分为以下三种分析方法。
①简化标势法:该方法用于分析无铁区或无电流源的模型;
②差分标势法:该方法用于有铁区,但是铁区不为磁场形成闭合回路的模型;
③通用标势法:该方法用于含铁区,且铁区又为磁场提供闭合回路的场合。
经过考虑,本文采用通用标势法对电机磁场进行求解。选择静态磁场分析,采用通用标势法,设置收敛精度为 0.001,完成求解[10]。
6 后处理及结果分析
当电流为16 A时电机的磁感应强度分布如图6所示。
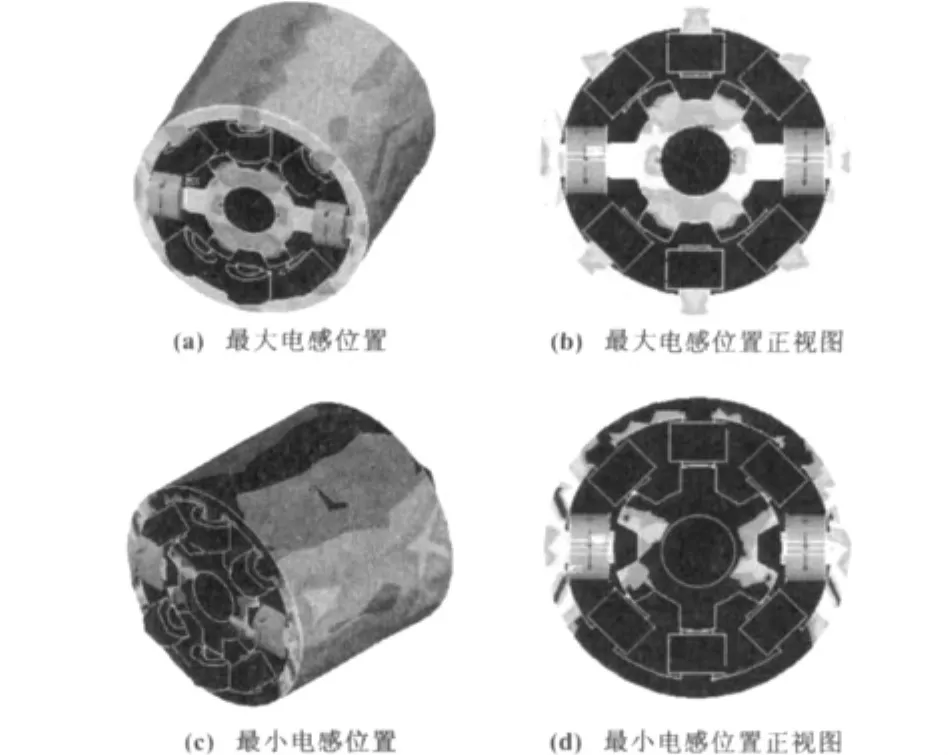
图6 磁感应强度分布Fig.6 Distribution of magnetic induction density
磁感应强度矢量分布如图7所示。磁感应强度的大小充分反映了开关磁阻电机内部电磁场的强弱分布。从图7可以看出,在通电线圈附近,磁场较强,其他处磁场较弱。

图7 磁感应强度矢量分布Fig.7 Distribution of magnetic induction vector
磁场强度分布如图8所示。

图8 磁场强度分布Fig.8 Distribution of magnetic field intensity
磁场强度矢量分布如图9所示。磁场强度的分布反映了电机磁场源的强弱。根据磁感应强度的分布规律也可以看出,磁通总是沿着磁阻最小的路径闭合。在磁路的方向上,极间漏磁通分布较乱,特别在最小电感位置,除定转子极的主磁通路径外,其他部分磁通较乱。同时可知,电机存在严重的局部饱和现象,最严重区域在定转子极附近,这也说明端部效应对结果会有很大的影响,体现了三维有限元分析的必要性。磁场强度最大值集中在定转子极间气隙。
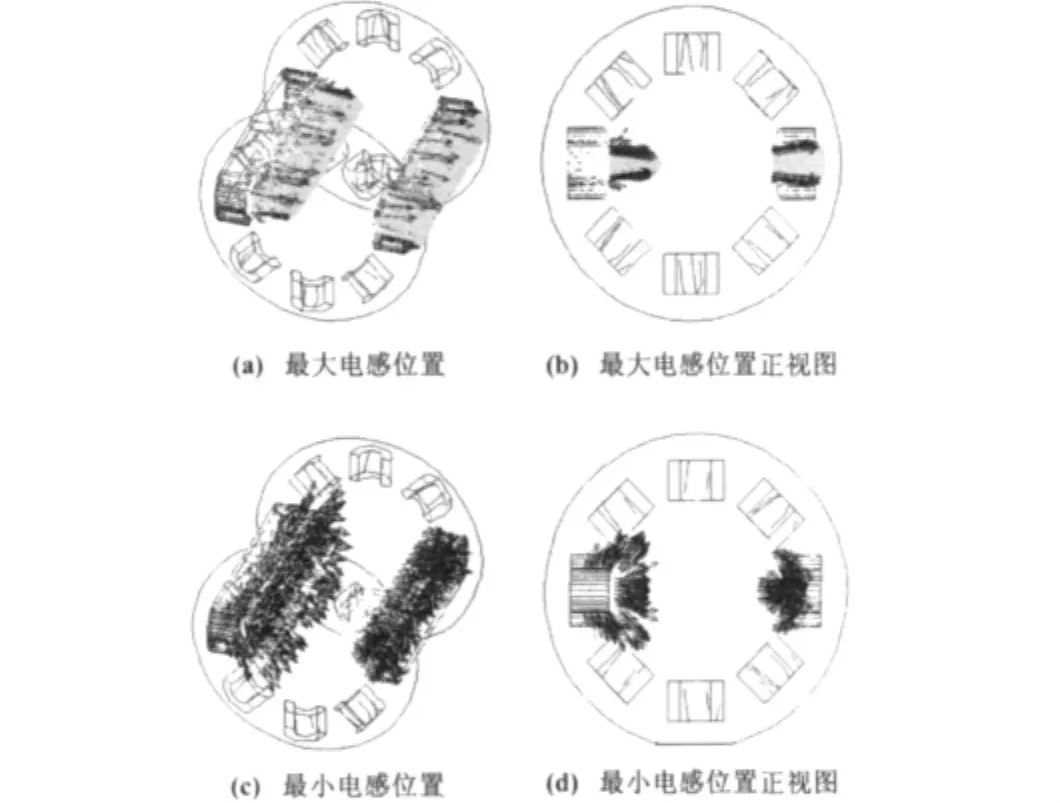
图9 磁场强度矢量分布Fig.9 Distribution of magnetic field intensity vector
7 结束语
本文对开关磁阻样机进行了三维有限元分析[11-14],考虑了端部效应对磁场分布的影响,构建了三维分析下的数学模型。该模型的特别之处在于三维有限元分析加载电流时提出了“跑道线圈”这一概念,在考虑了端部效应的同时,也解决了立体模型施加载荷时出现的方向选择困难的问题。采用通用磁标势法对非线性方程组进行求解,得出了最大电感和最小电感位置处的磁感应强度和磁场强度分布。
[1]张成振.开关磁阻电动机磁场的二维有限元全场域计算与分析[J].华南师范大学学报:自然科学版,1995(2):99-108.
[2]诸嘉慧.开关磁阻电动机电磁参数及静态特性的有限元分析[D].哈尔滨:哈尔滨理工大学,2003.
[3]Bianchi N.Electrical machine analysis using finite elements[M].Paris:Taylor Francis Group Press,2005:45 -70.
[4]Lee J Y,Lee B K,Sun T.Dynamic analysis of toroidal winding switched reluctance motor driven by 6-switch converter[J].IEEE Transactions on Magnetics,2006,42(4):1275 -1278.
[5]Faiz J,Pakdelian S.Finite element analysis of a switched reluctance motor under static eccentricity fault[J].IEEE Transactions on Magnetics,2006,42(8):2004 -2008.
[6]Ohdachi Y.Optimum design of switched reluctance motors using dynamic finite elementanalysis[J].IEEE Transactionson Magnetics,1997,33(2):2033 -2036.
[7]Rahman K M,Fahimi B,Suresh G,et al.Advantages of switched reluctance motor applications to EV and HEV:design and control issues[C]//IEEE Transactions on Applications,2000:111 -121.
[8]陈燕,杨松,王振民.ANSYS软件在开关磁阻电机电磁分析中的应用[J].煤炭科学技术,2001(4):20-22.
[9]李时伟.开关磁阻电动机参数分析及控制系统研究[D].哈尔滨:哈尔滨工业大学,2007.
[10]贺小艳.开关磁阻电机磁场有限元分析及动态特性仿真[D].太原:太原理工大学,2007.
[11]江缉光,刘秀成.电路原理[M].2版.北京:清华大学出版社,2007.
[12]马春燕.微机原理与接口技术:基于32位机[M].北京:电子工业出版社,2007.
[13]田金云,张广超,孟艳霞.基于单片机的LED汉字点阵显示系统设计[J].工业控制计算机,2008,21(6):87 -88.
[14]吴国忠,许懿洋.步进电机驱动电源的设计及其可靠性分析[J].中小型电机,2003,30(6):50-55.
