阵列电导探针流体成像仪在油水两相下的实验
2013-05-31胡金海刘兴斌刘继新孙跃义柴金刚
胡金海 刘兴斌 刘继新,2 孙跃义 柴金刚
(1.大庆油田有限责任公司测试技术服务分公司 黑龙江 大庆)(2.东北石油大学机械科学与工程学院 黑龙江 大庆)
0 引言
Schlumberger、Sondex(已被GE公司收购)和Computalog公司研发并投入应用了多种阵列探针式流体成像测井技术,目前SPE文献报道的应用较好的主要有Flowview Plus、GHOST、MAPS、RAT和CAT等阵列传感器组合仪器和相应的解释和成像软件,这些技术主要应用于大流量的油井中[1、2]。国内一些院校,比如浙江大学、天津大学、中国石油大学(北京)等在流体成像方面持续开展了多年研究工作,但截至目前只有中国石油大学吴锡令老师带领的团队开展了针对产液剖面测井的仪器开发工作[3][4]。大庆油田测试分公司与中国石油大学和北京航空航天大学于2009年联合开展了针对水平井产液剖面测量的流体成像测井仪器的开发工作,特别是在基于阵列电导探针的流体成像技术上取得了进展,形成了样机,并对样机在多相流模拟实验装置上油水两相流水平和垂直条件下分别进行了大量的实验,实验结果较为理想。
1 仪器的测量原理及设计
1.1 测量原理及传感器结构设计
电导探针进行串联,对电阻和电导探针施加交流正弦激励信号,电导探针测量原理及分布示意图如图1所示,由于电导探针处在油相和水相中电导值会有明显的差距,采集电导探针分得的电压值也会有明显的不同,通过与设定的阈值电压比较,即可以判断电导探针所处的油水状态。测量电极排布于支撑臂上,并且分布在两个不同的同心圆上,支撑臂和支撑轴均与测量电极电绝缘。测量电极遍布于整个测量截面,以确定油水两相流各相组分在整个管道或管道横截面上的局部分布信息。电导成像仪传感器结构图见图1(b),24个电导探针分成2层排布,均匀固定在12个支撑臂上,覆盖井筒的剖面。
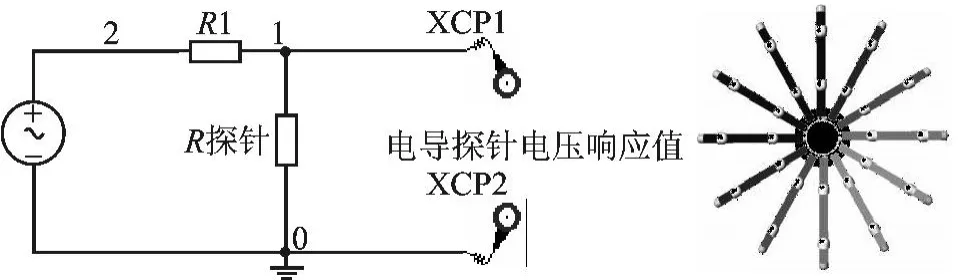
图1 电导探针测量原理及分布示意图
1.2 仪器的结构设计
电导探针成像仪结构图如图2所示。该仪器由上、下两个扶正器和电路及探针短接构成,通过上下两个扶正器保证仪器在进行实验室试验时居中水平放置。
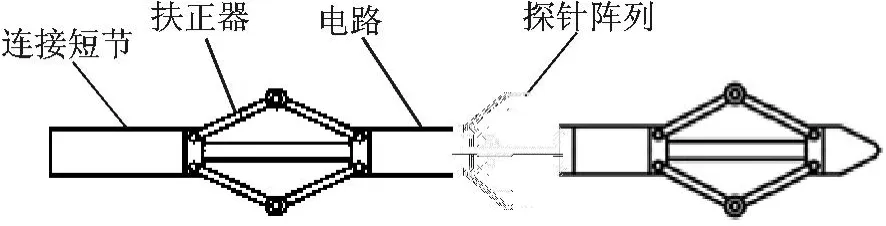
图2 仪器结构示意图
1.3 仪器电路设计
仪器电路的总体设计示意框图如图3所示。井下电路将信号采集模块、数字滤波模块、HDB3编码模块、数据存储模块及相应接口控制模块集成在同一片FPGA目标芯片中,配合外接相应的模拟电路单元,实现了双极性的HDB3码的输出,通过单芯电缆将数据传输到地面,地面电路首先设计极性转换电路,将双极性的HDB3码转换成单极性的HDB3码,将转换后的码制连接到地面FPGA端口,FPGA芯片完成对HDB3码时钟的恢复、数据的解码,并且通过RS-232串行接口实现同PC机的通讯,在PC机端设计应用软件,对串口发送的数据进行处理,可以恢复出井下油水流动图像,实现油井流动成像的目的。
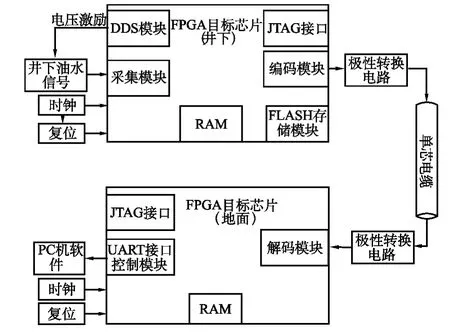
图3 硬件整体示意框图
2 两相流下的实验及分析
2.1 垂直条件下的实验及分析
当流量为100m3/d含水30%时上位机瞬时截图如图4所示,图中右侧部分24个坐标轴为24个电导探针在10秒内采集到油泡个数图像,单个坐标轴中每个红色方波脉冲表示为单个探针采集到的油泡,脉冲个数为油泡的个数,通过上位机的存储功能可以将一定时间内的油泡个数进行存储。分析上位机在每个流量点不同含水率下存储的5000组数据,当垂直井段流量在10m3/d、20m3/d、30m3/d、50m3/d、80m3/d、100m3/d、150m3/d、200m3/d,含水率为10%、30%、50%、70%、90%测得的不同流量下含水率与油泡个数曲线图如图5所示,从图(a)、(b)、(c)中可以看出,相同流量下,随着含水率的增加,油泡个数呈递减趋势。图5(b)为图5(a)中50%以上含水部分曲线放大,可以看出该仪器在含水率50%~90%范围内对油泡数仍有较好的分辨率。图5c为图5(a)的重复实验结果;图5(a)和图5(c)进行对比可以看出,两次实验的重复性很好,经统计相同条件下采集到的油泡个数相差不超10%。
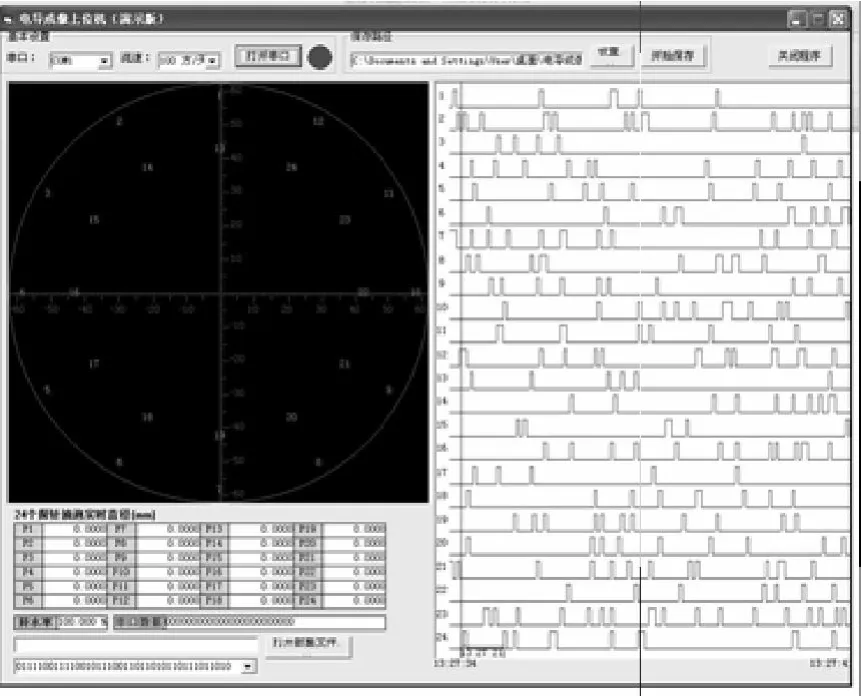
图4 流量为100m3/d含水30%上位机瞬时截图
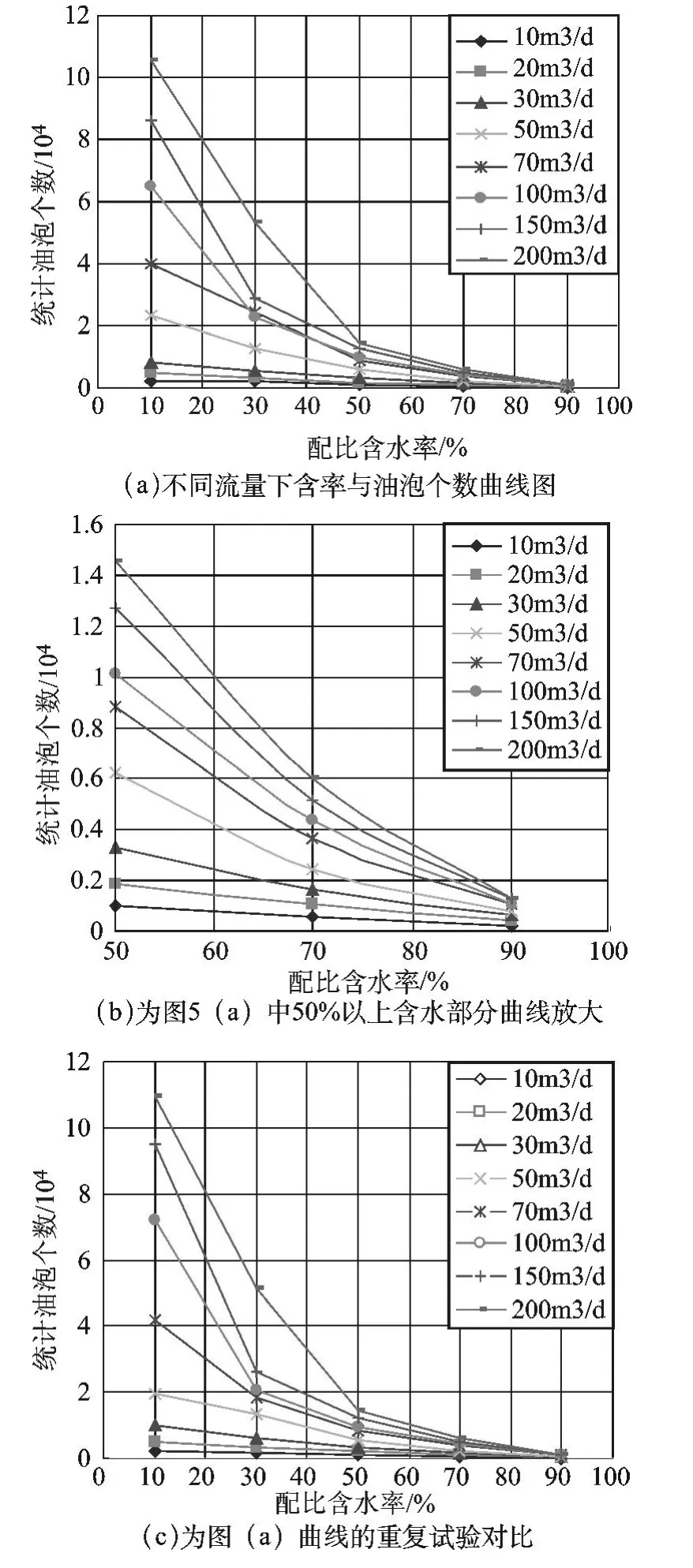
图5 电导成像仪在垂直条件下的实验结果
2.2 水平条件下的实验及分析
水平井段分别在流量点为50m3/d、70m3/d、100 m3/d、150m3/d、200m3/d,含水率为10%、30%、50%、70%、90%进行了实验,在相同条件下做了重复性实验。根据水平井电导探针成像原理可知,电导探针所处的油水状态对成像分层界面起着绝对性的作用,通过模拟井井筒照片与上位机软件截图图片进行对比,发现不同流量点不同含水率情况下模拟井筒内电导探针所处在的油水状态,与上位机软件显示的探针所处状态完全相同,但是由于探针的个数和机械分布的原因,上位机软件的油水界面与实际界面有一定的误差,这种误差主要是由探针的分布决定,可以通过完善探针的机械分布进行改进。例为流量为50 m3/d含水率为10%条件下模拟井井筒照片与上位机截图的对比图如图6所示,从模拟井井筒照片可以清楚的看到24个电导探针所处的油水状态,也可以看出油水的分界面,上位机截图中绿色部分表示为油,黑色部分表示为水,上位机软件中可以清楚的判断24个电导探针所处的油水状态及分层位置。
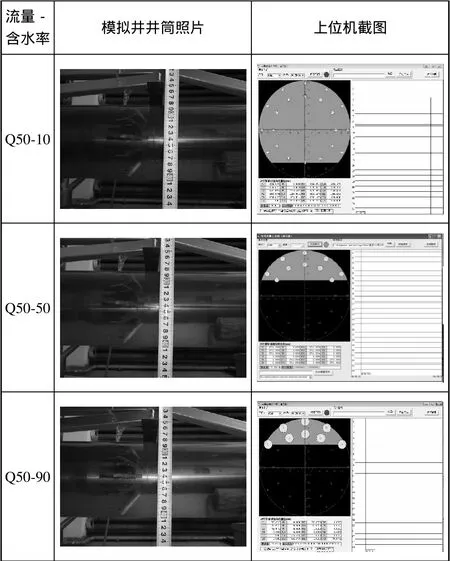
图6 水平条件下仪器在流量50 m3/d、几种含水率时成像结果图
3 结论
本文研究应用油水两相流电导成像样机进行了模拟井的动态实验,在垂直井和水平井的不同流量不同含水率下进行了实验,又分别作了重复性实验,得到了较为详实可靠的实验数据。但是在动态实验过程中还是出现了一些问题,在垂直井实验中,由于没有设计背光,导致在高速摄像情况下不能很好的观察油泡通过探针的情况;在水平井实验时,由于成像仪器的质量较大,导致扶正器不能将仪器完全支起,在采取人工处理后,才得以保障实验的进行。
对动态实验得到的数据进行了分析处理,在垂直井,绘制出油泡统计个数与油水流量和含水率之间的图板,得出了油水流量与油泡统计个数以及含水率与油泡个数之间的对应关系。在水平井,针对不用流量下不同含水的油水分层情况做了图片的对照,结果显示实拍分层照片与软件显示分层结果是一致的。
[1]罗未平.国外水平井生产测井技术[J].测井技术,1997,21(6)
[2]郭洪志,李冬梅.Flagship在中高含水期水平井中的应用研究[J].西南石油大学学报,2009,32(1)
[3]赵 亮,吴锡令.流动成像测量与流动成像测井技术研究进展[J].测井技术,2002,26(2)
[4]别 静,吴锡令,缪志伟.油井流动图像重建算法研究[J].石油天然气学报,2011,33(7)
