校罗差时磁偏差设定为零的机理分析
2013-05-31张清,吴剑
张 清,吴 剑
(安徽芜湖机械厂,安徽 芜湖 241007)
飞机校罗差工作关系到飞机惯导系统能否在飞行过程中正确地导引飞机按精确的航向飞行。完成飞机的大修工作,就必须掌握磁罗差的校正方法,而现有引进飞机的资料并未有完整的、简便的磁罗差校正方法介绍。某引进机型飞机使用的是平台式捷联惯导系统,在研究该机型磁罗差校准方法过程中,遇到不少理论和实践上的难题,将磁偏给定器设定为000.0,是通过推测、假设、试验和分析相结合得出的结论,如果不将磁差给定器设定为000.0,罗差计算会大大溢出指标,而在飞机地面通常检查时,磁差给定器磁偏差值往往设定为当地磁差,才能得到正确的航向。理解其工作机理,是掌握校准罗差方法的一个重要环节。文章阐述磁罗差校正的原理和校正方法、磁偏给定器的磁差作用机理,并进一步分析了校罗差时将磁偏给定器设定为000.0的工作机理。
1 磁罗差产生与校正
1.1 校罗差的背景
磁航向角是飞机纵轴在水平面上投影与磁子午线之间的夹角。真航向角(ψИ)是飞机纵轴在水平面上投影与真子午线Nt(即地理子午线)之间的夹角,方向规定为从真子午线北端顺时针转到飞机纵轴之夹角为“+”,反之为“-”,夹角范围为0°~360°。实际导航控制中按局部大圆航线坐标系计算导航参数。
由于飞机上铁磁物质的存在,影响惯导系统的磁传感器周围磁场变化,会直接产生磁偏差,影响磁航向参数的计算,从而影响导航控制的结果。消除惯导系统的这部分磁偏差,消除磁罗差,是装备修理必须完成的一项工作。在消除罗差前,飞机指示的磁航向可以称为罗航向,消除罗差后磁航向才有实用意义。
1.2 磁罗差
除了地球磁场以外,还有飞机铁磁体的磁场作用在感应传感器上,这会降低磁航向的精度,也是提高磁航向精度的障碍。这些干扰主要来源于磁性物质钢构件、钢索、发动机等。需要分辨出与半圆罗差和象限罗差有关的基本误差。
半圆罗差是飞机上的“硬铁”所引起的罗差。另一种罗差是由软磁材料时引起的,在有地磁和其他电磁环境的条件下激发这些材料产生磁场,这种罗差称为“软铁”罗差,它具有象限特性,这种罗差的大小与半圆罗差比起来相当小。
1.3 磁罗差测定
利用磁经纬仪在转动飞机时测得磁航向,作为飞机在各转动方位的标准磁航向,将使用检测设备测得的机上惯导系统实际罗航向值与此标准磁航向值进行比较,差值是磁罗差,这些差值是机体对惯导系统磁航向的影响所致的。按照测得的差值进一步利用 КМД-3磁差补偿器上 С、В、Д、Е补偿电位计进行校正,从而消除这些影响。
1.4 磁罗差校正
为消除仪器误差和磁修正器的罗差,引入了磁差补偿器КМД。校正罗差时,КМД采用从sin通道向COS通道(或相反)引入一个附加校正的方法,来消除具有象限特性的罗差和仪表误差。在КМД中有一个电压稳定器,从这个稳压器中产生一个对磁修正器罗差和仪表误差中具有半圆特性的部分进行补偿的直流电流送入感应传感器的信号绕组。这个电流的大小在飞机上校正罗差时可通过补偿电位计来改变,也就是改变了sin通道和COS通道的放大系数。
事实上引起磁通道误差包括磁通道产品自身的工具误差和机体铁磁物质引起的罗差。消除罗差又分为两部分:一是消除组成Ц-060系统的产品自身对磁航向产生的误差,即校正惯导系统磁通道工具误差,是通过КМД-3磁差补偿器上Син、Вин补偿电位计补偿惯导系统磁通道半园特性的工具误差和通过КМД-3磁差补偿器上Дин、Еин补偿电位计补偿惯导系统的磁通道象限特性的工具误差;另外就是消除机体包括发动机的铁磁物质对半园特性、象限特性磁罗差的影响产生的罗差,是通过КМД-3磁差补偿器上С、В补偿电位计补偿引起半园特性的磁差影响和通过КМД-3磁差补偿器上Д、Е补偿电位计补偿引起象限特性的磁差影响,这两部分相互关联和影响,都可以在外场完成,一般情况下,先进行磁通道误差的校正,再进行飞机的罗差校正。[1]
2 罗差校正方法
2.1 经纬仪初始校正
飞机牵引到罗盘场,先使经纬仪垂直平台和飞机纵轴平台重合,相当于磁经纬仪在后面测得的航向值反映的是飞机的航向值,利用当地目标的标准磁航向值锁定磁经纬仪端轴承,使目镜对准目标不变,松开水平刻度盘限制器,转动飞机罗盘刻度变化值就是飞机的转动角度,然后按照校罗差方法就可以测定各方位上的罗差,最终给予补偿。[2]
2.2 罗差测定与校正
转动经纬仪,对准减速伞舱上敌我识别器的询问天线,按下“МК”(磁修正)按钮,正常对准后按压“主惯性平台”按钮,磁差给定器则设定磁偏差为000.0,此时,惯导航向罗差校正设备测定的磁(罗)航向值是导航计算机根据惯性平台输出的陀螺磁航向,经磁感应传感器(ИД-6)感受的磁航向信号、纬度给定器(ПШК-7)给定的纬度信号、磁差补偿器(КМД-3)给定的当地磁偏差信号补偿计算而产生的。[3]经纬仪测量值就是飞机这一角度的磁航向,惯导航向罗差校正设备测定的磁(罗)航向值与经纬仪测定值的差值就是该方位角上的罗差。[4]
转动飞机到0°、45°……等相差45°的方位上,重新利用惯导航向罗差校正设备与光学经纬仪测量值偏差,确定新方位角的罗差。
根据测定的罗差值确定系统的安装误差和四方方位(0°、90°、180°、270°)上罗差值,并以此КМД-3磁差补偿器上С、В、Д、Е补偿电位计进行补偿校正,将罗差补偿到合格的要求值范围内。
3 磁偏差设为零的机理分析
罗差的计算公式为:

式中,ψМК为惯导系统的磁航向,在校准前可称为罗航向(ψL);ψКК为经纬仪测出的磁航向;ΔψК为罗差,罗差包含前面论述的安装误差(或圆周罗差)、半圆罗差、象限罗差,它反映的是飞机自身对磁传感器的影响。
在惯导系统中,惯导系统的航向输出ψПР与磁航向 ψМК、磁航向 ψКК、罗差 ΔψК、磁差 ΔψМ的关系如图 1 所示。[5]
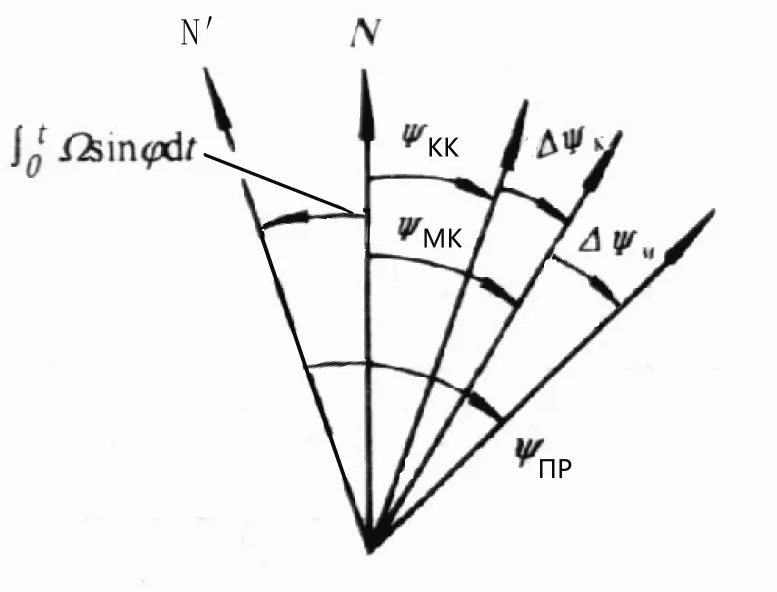
图1 磁航向、表航向和磁差
从图1中得公式(2):

式中,ΔψМ为磁差,磁差是磁北方向与真子午线之差,磁差是从真子午线顺时针旋转为正,逆时针为负。[6]
实际校罗差操作中,利用经纬仪测定的磁航向就是利用经纬仪上磁罗盘测出罗盘场该方位的磁航向ψКК,作为飞机纵轴在该方位磁航向的标准值。
校罗差时,需要接通惯导系统和导航计算机,使用惯导航向罗差校正设备测定的磁航向值应是惯导系统的计算航向ψПР,而且必须按下“МК”(磁修正)按钮,利用右垂尾上的磁感应传感器信号修正计算的磁航向,按下“主惯性平台”按钮是选择主平台输出值来计算航向 ψПР。[7]
从公式(2)可以看出,计算航向ψПР并不是以初始真北(N)为参照来计算的,而是以实际真北(N')来参照计算的,ψПР并不就是ψМК,还有一个反映地球自转角速度的垂直量影响实际真北N'的积分项。导航计算时实际上根据实际真北求解的,实际真北与初始真北的变化原因就是地球的由于自转角速度的影响,相差值就是式(2)中积分项,飞机在地面上与地球一起自转,积分项的影响可不计,视为0。那么ψПР思考用下式(3)来替代。

经纬仪读取的目标的标准磁航向是受地磁偏差ΔψМ影响的,指示的是与磁北为参照系的。但由于是罗盘场地测定的磁航向值,转动飞机的角度变化仅是方位角的变化,计算出的各方位上航向值不含飞机对经纬仪的影响。
而从飞机仪表读取的磁航向指示值或从检测设备上读取的磁航向(罗航向),是按公式(2)或(3)计算的,已包含地域磁偏差ΔψМ对磁感应传感器的影响。但是 ψПР(或 ψГМК)指示的是与地理真北(实际真北)相对的真航向值,地面正常对准时,惯导系统为了计算真航向,按公式(1)测定罗差时,应该保证两个数据都是以磁北为参照系,即ψГМК与经纬仪上罗航向值一样都是以磁北为参照系比较,方能得出合理的罗差数据。只有机上磁偏差给定器必须设定磁差ΔψМ=0,这时按公式(3)计算得到的飞机仪表或检测设备读取的ψГМК指示值表达为以磁北为参照系的航向值。
罗盘场地在建设时主要标准要求,各方位上的磁偏差数值必须相同,且很小可以忽略(不大于6'),因此转动飞机测得的磁航向ψКК就不考虑罗盘场地周围环境的影响,这样各方位上按公式(1)计算罗差从理论上就完全成立了。不过,考虑各地域因地球磁场、环境以及目标参照物等因素对磁北的影响,罗盘场地需要适时进行场地罗差再校正,通过修正目标的标准航向值,可以消除地域磁差、环境等因素的影响。[8]
4 结论
文章校正罗差的方法是根据引进资料方法、校罗差的一般原理和其他机型校罗差经验归纳所得,确定磁偏差给定器设定值也是掌握校罗差方法的难点和要点。通过上述分析可知,消除罗差必须先测定罗差,测定罗差是利用各方位的罗航向与磁航向相比较而得,飞机指示的航向是经过导航计算机的计算航向,要用计算航向代替罗航向,就要求两个数据表达的物理意义相同,实现此目的需要设定磁偏差给定器的值为000.0。
[1]911-02产品技术使用指南[Z].КМИВ.461535.001 РЭ.1986.
[2]张宗麟.惯性导航与组合导航[M].北京:航空工业出版社,2000.
[3]Ц-060 产品技术使用指南[Z]6Д1.790.104 РЭ 第 2册
[4]宫经宽.航空机载惯性导航系统[M].北京:航空工业出版社,2010.
[5]秦永元.惯性导航[M].北京:科学出版社,2006.
[6]张宗麟.通过飞机停放航向判断惯导平台漂移误差方法的研究[J].中国惯性技术学报,2000,(4).
[7]Изделие ц- 060 рухнической эксплуатацин .6д1.790.104 рэ Частб 3 .1986.
[8]魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2009.
