鱼雷动力电池充放电自动操控技术及其应用
2013-05-28孙云春
李 伟, 孙云春, 邓 鹏
鱼雷动力电池充放电自动操控技术及其应用
李 伟1, 孙云春2, 邓 鹏1
(1. 海军潜艇学院 导弹兵器系, 山东 青岛, 266042; 2. 海军92132部队, 山东 青岛, 266071)
基于对现有充放电自动操作、控制及检测技术的研究, 提出了集自动化、智能化和数字化为一体的鱼雷电池技术准备自动操控系统的技术方案, 阐述了微控制器(MCU)主控部分、信号传输部分、功率驱动及执行部分、人机操控界面、模块化电源和总体结构布局等各部分的设计及实现方法, 通过对120块动力电池串联充电过程中参数异常(如电压骤变或温升过快)电池和容量已满电池的断电保护、自动切出和恢复充电, 实现鱼雷动力电池充放电的全程自动控制, 以及现场无人值守的远程在线监控。
鱼雷电池; 充放电; 自动操控
0 引言
为了节约经费, 实现重复利用, 电动鱼雷在日常训练时一般使用银锌二次电池组作为动力能源[1], 电池组的充放电过程是鱼雷技术保障的重要环节之一。
银锌电池的充放电采用串联恒流方式, 电流范围30~60 A。每块电池充满后的电压约2 V, 且要求所有单体电池的满荷电压相同(误差范围内), 以保证整体电池组工作时的放电功率和效能。充电时正极板上的金属银被氧化成氧化银, 负极板上的氧化锌被还原成金属锌; 同时, 电池正负极间的电压逐渐升高。因此, 可通过测量电压判断电池充电的程度, 避免电池的过充和欠充。
1 现有操作存在的问题
在以往的保障阵地鱼雷动力电池技术准备中, 银锌动力电池组的充放电是一个比较复杂和繁琐的过程, 操作人员要监控每块电池的状态, 发现异常及时处理, 防止单体电池过充电、过放电等损害现象发生。
具体来讲, 在电池充电过程中, 每间隔一段时间(1 h以内), 需要用万用表人工检测每块单体电池的电压, 如有超过门限电压的电池, 需要手动关掉充电机, 人工把该电池从充电环节中拆出, 然后连接好剩余电池, 启动充电机继续充电。
鱼雷一组银锌电池组最少包括120块单体电池, 充电时对其逐一进行定时电压检测, 一次巡回就需要测量120个电压数据, 对每块电池的电压数据要进行登记和判断。操作中120块电池的取出需要逐一旋下固定螺帽和配套连接片, 启动充电机80~120次。在电池技术准备中, 操作员的工作量相当大, 对操作员的责任心有很高要求。
经测算, 每准备1条鱼雷的动力电池组, 连接单体电池、控制充电机通断、串联电路的切换和测量记录等操作, 总共需要至少150 min。同时, 长时间的重复劳动使操作人员的体力精力消耗很大, 极易疲劳, 造成注意力不集中, 产生误操从而导致事故。
2 国内电池充放电技术分析比较
为解决上述存在问题, 依据鱼雷电池自动操控的需求, 对国内具有代表性的几种电池充放电监控技术进行了研究和比较, 试图从中总结出最为切实可行的方法。
2.1 基于MSP430的大容量铅蓄电池充放电监视系统
为了满足实际使用中对蓄电池充放电状态的适时监视和测量, 该监视系统采用MSP430单片机作为处理器[2], 整个测试设备体积小、成本低、工作可靠稳定、使用方便。该监视系统采用T1公司的低功耗混合信号处理器MSP430, 充分利用了单片机片内集成的各个模块, 极大地减少了外部器件的使用数量和系统功耗。能够对额定电流为100~1000A的蓄电池进行充放电监视, 通过外部接口选择, 处理器自动调用下位的数据表进行测试, 同时在液晶模块上显示被测蓄电池的状态信息。
2.2 基于RS485总线的蓄电池充放电远程控制系统
该系统主要通过下位机(单片机)将采集到的蓄电池电压及电流信号经处理后发送给上位机(PC机), 再经可视化的人机界面实现充放电的实时状态显示和控制。考虑到该系统要具有较强抗干扰能力, 传输距离长、工程布线简单、适合扩展、便于控制的特点, 故采用RS 485总线实现远距离数据传输[3]。
2.3 基于PLC的智能型蓄电池充放电机
该设备实现恒流与恒压相结合的充电控制过程[4]。在恒流放电时, 采用有源逆变, 把电能回馈给电网, 同时, 对电池电压进行检测, 如果电池电压小于设定电压, 将予以报警。
工作时, 由电压及电流传感器测得充放电过程的电压和电流信号, 信号滤波后, 被可编程逻辑控制器(programmable logic controller, PLC)周期采样。按照设定的程序, 分段进行充放电, 无需人工干预而自动完成。测量的电流、电压信号, 是带有纹波的直流, 经过二型滤波器滤波, 进入PLC作为比例积分微分(proportion integration differentiation, PID)模糊控制的输入量。
2.4 基于MC68HC单片机的蓄电池充放电综合控制设备
该综合控制设备以MC68HC908SR12微控制器为控制核心, 采用现场可编程门阵列(field programmable gate array, FPGA)辅助控制设计。主要包括电源电路、恒流恒压充电控制单元、平衡放电控制单元、中央控制单元、FPGA辅助控制单元、温度检测电路和人机接口电路等。该设备主要针对军事应用中一些不断电设备耗能较大、普遍采用蓄电池串联供电的情况而设计[5-6]。在设计过程中着重考虑蓄电池的平衡特性, 以提高串联蓄电池组的供电效率, 延长其使用寿命。
综上所述, 通过对电池充放电测量、控制领域的现有技术进行分析比较, 找出适用于串联式充放电电路的软硬件设计方法, 实现鱼雷动力电池充放电操作过程的自动化, 包括参数测量、参数记录管理、充电机控制和单体电池转接等的自动化和智能化[7], 大幅度缩短人工操作时间, 大大降低劳动强度, 显著提高工作效率, 以提高鱼雷技术准备的科学性和安全性。
3 充放电自动操控系统总体设计
鱼雷电池充放电自动操控系统原理组成见图1。
该系统以微控制器(micro control unit, MCU)为现场控制核心和数据处理中心, 配以电压循环采集、温度传感器和电流互感模块, 通过控制信号继电器的对应通断, 自动采集(巡检)正在串联充电的电池组(≥120块)的单体电压、充电电流和电池(接线柱)温度等技术参数, 在液晶显示器上循环显示测量数据, 并有120个充电状态指示灯显示所对应的每块电池的当前状态(正在充电还是停止充电)。一旦某块电池的电压达到预定门限(饱和电压)时, MCU经综合信号处理, 触发声光报警, 同时向充电机发出信号以暂停充电, 然后通过驱动板向电池电路切换装置发出指令, 操控系统的磁保持继电回路自动执行将该电池从充电电路切出及充电回路的重新自动联通。监控中心确认切换完成后发出取消充电机暂停信号并关闭光电报警, 继续充电过程。该系统除具备现场控制功能外, MCU还可以作为下位机, 通过网路实现与远程PC(上位机)的数据传输与交换, 达到非现场的在线实时监控效果。所有数据可以及时输出或打印, 便于技术管理和故障分析。
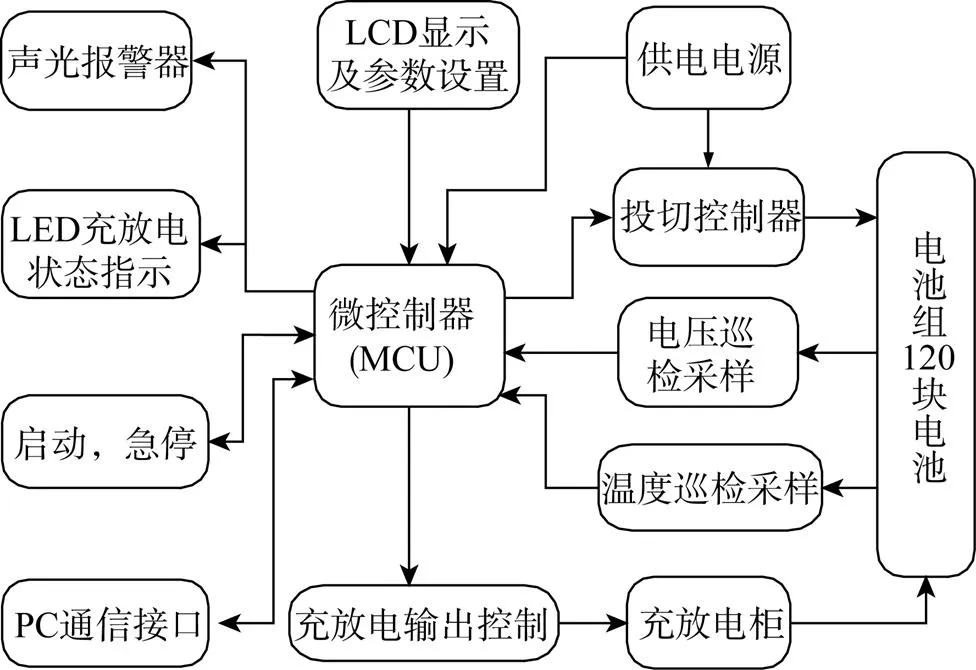
图1 系统组成原理框图
4 充放电自动操控系统技术实现
该自动操控系统的技术实现主要分为MCU主控部分、信号传输部分、功率驱动及执行部分、人机操控界面、模块化电源和总体结构布局等六大部分。
4.1 MCU主控部分
系统对MCU的要求: 工作稳定、可靠, 具有AD采样功能(8位以上)及标准UART口以便与PC上位机通信, 有足够的I/O口及编程资源保障。
本系统采用MC68HC908AB32(64)微控制器作为主控核心, 具有速度快、功能强、抗干扰、功耗低以及自带闪存、监控、锁相环等优点。MCU负责完成定时发出巡检指令, 接收送来的电池电压并根据工作方式作出判断, 适时输出充电机暂停及重启指令和声光报警及撤销指令, 输出充放电回路继电器切换指令, 输出单体电池离线显示指令等任务。图2为系统工作主流程。

图2 系统工作主流程
由于需要控制的继电器数量繁多, 设计上采用4套互相关联的电路阵列组成联合控制中心。每套电路中采用12位模数转换芯片进行电池端电压采样, 运算控制采用数字信号处理器芯片, 输出采用大规模逻辑芯片。
4.2 信号传输部分
控制信号的传输采用串行移位寄存器级联方式, 其优点是每块驱动板没有先后之分, 前后可互换, 电路简捷。每块板标准驱动控制接口为16路, 板间信号传输仅3条线, 配线简单可靠。控制信号传输框图如图3所示。
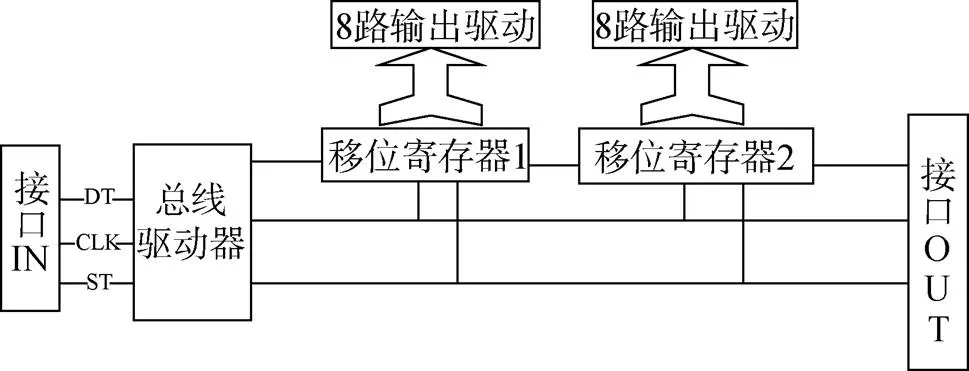
图3 控制信号传输框图
4.3 功率驱动及继电执行部分
主要包括16块继电器I/O板, 每块板上面布置有16个功率继电器, 可以监控8块电池的技术状态。这样120块电池需要15块I/O板。设计控制总线位为10位。
由移位寄存器输出的控制信号经过光耦隔离后, 再由驱动电路直接驱动大功率电力继电器, 执行电池的投切控制。这部分的设计要求运行动作可靠﹑安全, 能够较好地应对电路运行的突发事件。因此, 大功率电力继电器作为切换开关是理想的选择。本电路设计中采用带载切换能力60 A、动作时间≤10 ms、最大切换功率15 kWA的磁保持继电器实现互锁控制。驱动单元电路如图4所示。磁保持继电器是近几年发展起来的一种高可靠性自动开关继电器。其优势在于: 继电器的常闭或常开状态完全是依赖永久磁钢的作用, 状态转换是靠一定宽度的脉冲电信号触发而完成, 一般干扰无法使其误动。

图4 驱动单元电路框图
4.4 人机操控界面和上位机设计
现场人机操控界面(下位机)部分完成液晶显示运行数据、按键设定系统运行数据以及120个指示灯显示蓄电池是否离线等功能。
上位机采用加固式笔记本电脑, 除了具备现场人机液晶界面的功能外, 还具备数据存储、分析和远程在线监控功能。上位机页面设计见图5。上位机与下位机的通信采用“数据终端设备(data terminal equipment,DTE)和数据通信设备(data communications equipment,DCE)之间串行二进制数据交换接口技术标准”RS-232-C[8-9], 这是目前工业控制局域通信中最常用的串行通信接口。

图5 上位机监控界面
上位机软件开发采用由Borland公司推出的全新Delphi可视化编程环境, 是方便快捷的Microsoft Windows应用程序开发工具。采用面向对象程序语言(object-oriented language, OOL)、快速编译器和先进的数据库技术。
4.5 总体结构及引线设计
整个系统总体呈长方柜体结构, 底部装有滚轮易于移动。侧面采用模块设计的收放线结构, 将120路接线分成6个相对独立的门式开启输出通道组合, 当240根电线同时引出后可避免缠绕混乱, 方便接插和梳理。 操控系统(机柜)的外形设计和内部电路布局结构见图6。

图6 自动操控系统外形及内部电路布局结构
4.6 供电电源部分
自动操控系统内部供电全部采用直流低压供电方案, 电源分5VDC和24VDC两路, 5VDC用于主控部分供电, 24VDC用于驱动部分供电, 且3个开关电源分别独立供电。由于机柜内无强交流电参与工作, 有效切断了强电干扰的耦合途径, 同时, 切换开关采用低压直流继电器, 取消了大量的柜内强电围绕布线, 进一步优化了整机工作的电磁兼容性, 显著提高了可靠性。
5 结论
本文提出的集自动化、智能化和数字化为一体的鱼雷电池技术准备自动操控系统技术设想, 在以下方面进行了探索, 并通过工程研发, 验证了可行性。
1) 全流程防异常单步自检
在整个充电过程中, 每次继电器的状态切换前都由监控中心发出指令, 对所有继电器及电池状态进行自检, 确认全部电路正常后再启动切换, 保证无电火花冲击的空载切换。一旦发现电路异常即自动切断充电机电源, 并显示故障位置, 保证电池切换时的绝对安全。
2) 全电路单元级短路保护
为了实现多达120块电池切换单元电路的触点安全保护, 避免异常情况下电池短路时瞬间电流剧增对电路的冲击和破坏, 在每个单元电池的回路中加装RC吸收保护, 以应对突发事件(带载切换), 同时每块电池回路加装单极快熔保险器(40 A), 实现一对一安全监控。
3) 防短路可互锁磁保持控制
使反复性频繁继电切换具有良好的断电延续性和防短路互锁性, 安全可靠。而且与使用交流接触器相比, 该继电器具有耗电少(约1 W)、干扰低、动作迅速和使用寿命长等优点。
4) 信号与驱动全隔离
将信号控制与驱动电源完全隔离, 消除了交变电磁场干扰, 继电器吸合线圈加续流保护, 避免误动作, 抗干扰能力强。
另外, 本系统保留了现有鱼雷充电机的设备体系, 从节约研制成本和保证部队操作延续性等方面考虑, 没有对充电机本身进行改进, 而是针对技术准备中工作量最大的人工操作部分进行全面改进和提高, 经部队多年使用效果良好。
[1] 石秀华, 王晓娟. 水中兵器概论(鱼雷分册)[M]. 西安: 西北工业大学出版社, 2005: 23-28.
[2] 刘丰, 卢启柱, 郑绳植. 大容量铅蓄电池充放电监视仪的研制[J]. 仪表技术与传感器, 2003(8): 15-17. Liu Feng, Lu Qi-zhu, Zheng Sheng-zhi. Designing of Supervisor for Charging or Discharging Lead Mass Capacity Accumulator[J]. Instrument Technique and Sensor, 2003 (8): 15-17.
[3] 杨亚丽, 李匡成, 李春平. 基于RS485总线的蓄电池充放电装置远程控制系统[J]. 现代电子技术, 2008, 32(14): 73-75.Yang Ya-li, Li Kuang-cheng, Li Chun-ping. System of Long-diatance Control Charge/Diacharge Equipment Based on RS485 Bus[J]. Modern Electronics Technique, 2008, 32(14): 73-75.
[4] 杨凯, 张会, 梅军辉, 等. 一种新型的蓄电池充放电综合控制设备[J]. 现代电子技术, 2008, 32(20): 59-61.Yang Kai, Zhang Hui, Mei Jun-hui, et al. A New Storage Battery Charge and Discharge Comprehensive Control Equipments[J]. Modern Electronics Technique, 2008, 32 (20): 59-61.
[5] 裴晓泽, 姜久春, 冯韬. 电动汽车蓄电池充放电系统的实现[J]. 电力电子技术, 2008, 42(3): 17-19.Pei Xiao-ze, Jiang Yong-chun, Feng Tao. Implementation of Battery Charge and Discharge System in Electric Vehicle[J]. Power Electronics, 2008, 42(3): 17-19.
[6] 王秀荣, 黄伟志. 基于BQ24703的智能电池充放电系统[J]. 仪器仪表用户, 2007, 14(1): 26-27.Wang Xiu-rong, Huang Wei-zhi. The Intelligent Battery Charge/Discharge System Based on BQ24703[J]. Electronic Instrumentation Customer, 2007, 14(1): 26-27.
[7] 邵启湖. 基于单片机的直流电源电池监控系统的硬件设计[J]. 科技信息(学术版), 2006(2): 67-68.
[8] 李翔, 张晓华. 蓄电池充放电电压测量装置技术[J]. 电工技术, 2007(8): 76-77.
[9] 刘俊峰, 片春媛, 袁莉, 等. 蓄电池充放电过程中的单体电压检测系统[J]. 现代城市轨道交通, 2005(5): 41-42. Liu Jun-feng, Pian Chun-yuan, Yuan Li, et al. Detection System for Voltage of Storage Battery in Process of Charge and Discharge[J]. Modern Urban Transit, 2005 (5): 41-42.
Automatic Manipulation Technique of Charge and Discharge for Torpedo Power Battery
LI Wei1, SUN Yun-chun2, DENG Peng1
(1. Department of Missile and Weaponry Engineering, Navy Submarine Academy, Qingdao 266042, China; 2.92132thUnit, The People′s Liberation Army of China, Qingdao 266012, China)
Based on the analysis on existing automatic operation, control and detection technique of charge and discharge of torpedo power battery, a scheme of novel automatic manipulation system for charge and discharge of torpedo power battery is presented. The designs and implementation methods of the master control part, the signal transmission part, the power drive and execution part, the man-machine control interface, and the modularized power supply, as well as the overall structure and layout of the micro control unit (MCU), are explained. The charging process of 120 batteries in series shows that the system can realize the functions of overall automatic control, unmanned online remote monitoring of torpedo power battery charge and discharge with power-off protection, and automatic charge cut-off or recovery in the cases of abnormal parameters (such as sudden change of voltage or over-fast rise of temperature) and full capacity.
torpedo battery; charge and discharge; automatic manipulation
TJ631.2; TJ630.32
A
1673-1948(2013)04-0282-05
2013-03-23;
2013-05-17.
李 伟(1967-), 男, 副教授, 博士, 研究方向为潜用武器作战使用及保障.
(责任编辑: 陈 曦)
