水下声自导武器目标跟踪建模与仿真
2013-05-28杨向锋杨云川陈亚林
杨向锋, 杨云川, 陈亚林
水下声自导武器目标跟踪建模与仿真
杨向锋, 杨云川, 陈亚林
(中国船舶重工集团公司 第705研究所, 陕西 西安, 710075)
目标跟踪是水下声自导武器智能化发展的重要方向之一。水下主动声自导武器目标跟踪过程具有观测基座运动和观测时变的特点, 本文利用水下声自导武器导航定位及航行姿态参数和水下声自导武器检测到的目标信息, 基于坐标变换将目标坐标从水下声自导武器坐标系变换到大地坐标系, 解决了观测基座运动的问题, 通过实时计算采样周期解决了观测时变问题, 建立了基于卡尔曼滤波的水下声自导武器目标跟踪模型, 分析了滤波初值选取问题, 给出了滤波初值选取的工程方法。仿真结果证明, 本文所建模型正确, 跟踪算法具有较快的收敛速度, 跟踪效果良好。
水下声自导武器; 目标跟踪; 基座运动; 观测时变; 卡尔曼滤波
0 引言
目标跟踪是人们运用各种观测和计算手段, 实现主体对被关注客体状态建模、估计及跟踪的过程。目标跟踪可以及时对运动目标进行预警或跟踪、发现并锁定被跟踪目标, 估计并分析其运动状态, 为火力控制、威胁评估、态势评估, 直至各级指挥控制系统提供决策信息[1]。目标跟踪理论和技术经历了辉煌的发展历程, 形成了维纳滤波和近代卡尔曼滤波2大理论体系。
目前卡尔曼滤波理论基本替代了维纳滤波理论, 成为国内外学者进行现代目标跟踪研究的主要方法[2]。目标跟踪是水下声学观测系统和水下声自导武器的重要功能之一。近年来, 应用卡尔曼滤波方法对水下目标进行跟踪得到了广泛的研究[3-7], 但主要是针对水下声学观测系统基于被动观测方式的目标跟踪方法研究。本文主要针对水下主动声自导武器标跟踪问题, 分析了水下主动声自导武器的工作特点, 并建立了水下声自导武器主动目标跟踪模型, 对跟踪模型进行了仿真试验, 试验表明该模型正确, 跟踪算法具有较快的收敛速度, 跟踪效果良好。
1 跟踪建模
1.1 水下声自导武器的工作特点
水下声自导武器在主动方式工作时, 通过发射声信号并接收目标反射信号对目标进行检测及参量估计, 获得目标相对空间信息后进行弹道机动, 在弹道机动过程中继续进行检测、参量估计并实施目标跟踪, 最后进行打击。由此可见, 作为观测平台的水下声自导武器一直处于高速机动状态。在作战过程中, 水下声自导武器高速机动, 目标同时也处于运动中, 其与目标的相对位置不断变化, 并根据与目标的距离实时调整探测波形和检测周期, 同时水下声自导武器进行弹道机动时需要一定的时间实现, 最终导致观测时间处于变化之中。综合以上因素, 水下声自导武器攻击目标的过程表现为一个观测基座运动和观测时变的过程。标准卡尔曼滤波方法对目标进行跟踪时, 要求目标的多次观测须处于同一个观测坐标系下, 而观测时间即采样周期必须确知, 因此水下声自导武器利用卡尔曼滤波方法对目标进行跟踪须解决观测基座运动和观测时变的问题。
1.2 坐标变换
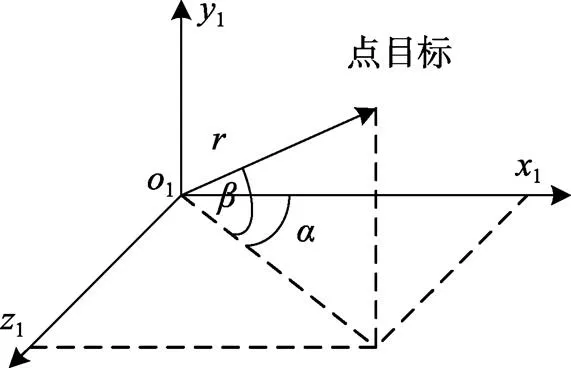
图1 水下声自导武器直角坐标系
由几何关系知其水下声自导武器坐标系的坐标

图2 水下声自导武器坐标系与大地坐标系的旋转关系



1.3 目标状态方程
对水下目标而言, 未受攻击时, 在水下可能静止或匀速运动; 在受水下声自导武器攻击时的运动不外乎加速、转弯、下潜等。在运动过程中其加速度一般恒定或变化不大认为恒定, 因此目标的坐标方程、速度方程、加速度为
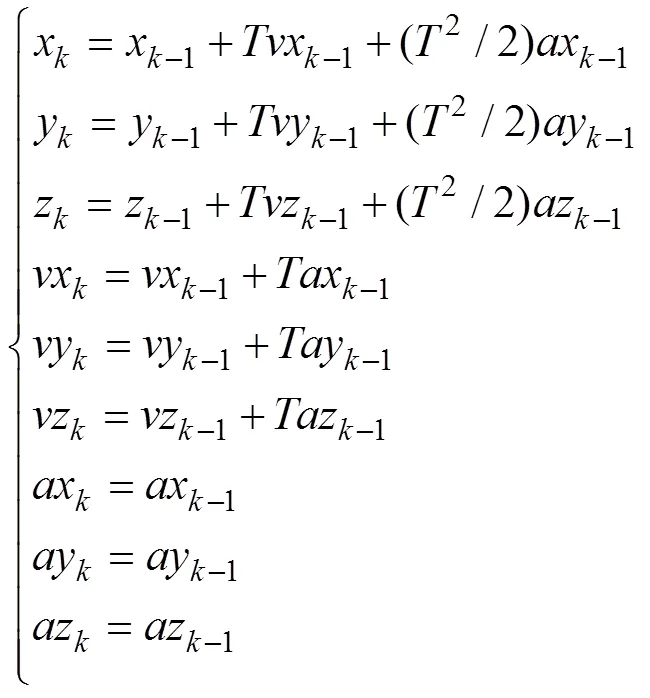
式中:x,y,z,vx,vy,vz,ax,ay,az分别是目标在轴、轴、轴上的坐标、速度、加速度;是采样周期。
水下声自导武器攻击目标的过程是一个时变过程, 相邻2次检测之间可能存在水下声自导武器弹道的变换过程, 同时根据自导系统配置可能存在周期时间调整, 而且在自导工作过程中可能出现某周期丢失目标, 下周期又检测到目标的情况, 即式(4)中的是变化的, 而标准卡尔曼滤波方法要求系统采样周期必须是确知且等间隔,变化导致状态转移矩阵不确定, 因此无法直接使用标准卡尔曼滤波方法。
水下声自导武器自导系统可以在统一时钟下提供每次检测的精确时间, 采样周期可以通过相邻2次观测的时间进行实时计算, 即

1.4 跟踪模型
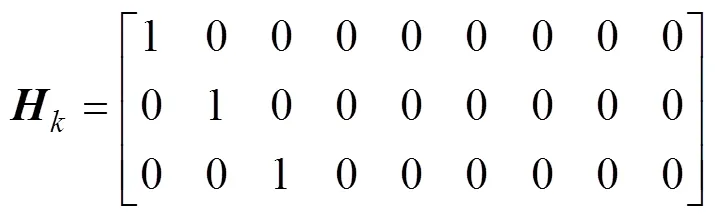
水下声自导武器攻击目标的过程相对短暂, 因此可忽略外界的环境对目标运动的干扰。选择目标在轴、轴、轴上的坐标、速度、加速度为状态向量, 则状态方程及状态转移矩阵可表示为



得到状态方程和观测方程后就可以给出跟踪滤波的卡尔曼递推公式



根据上式可知

由于任意2次观测相互独立, 故


由式(16)~式(18)可知


5)根据式(12)进行滤波递推计算。
2 仿真结果与分析

图3 跟踪滤波结果

图4 目标跟踪误差曲线

图5 目标速度估计结果

图6 目标加速度估计结果
由图可以看出, 跟踪滤波后误差明显小于原始检测值的误差, 跟踪收敛速度较快, 跟踪效果良好。目标运动速度估计和加速度估计很快向设计值收敛, 与实际数据样本设计参数相符。
3 结束语

[1] 潘泉, 梁彦, 杨峰, 等. 现代目标跟踪与信息融合[M].北京: 国防工业出版社, 2009.
[2] 权太范. 目标跟踪新理论与技术[M]. 北京: 国防工业出版社, 2009.
[3] 关欣, 何友, 衣晓. 双基阵纯方位水下被动目标跟踪性能仿真分析[J]. 系统仿真学报, 2003, 15(10): 1464-1466, 1491.Guan Xin, He You, Yi Xiao. Emulation Analysis on the Performance of Underwater Bearing-only Passive Target Tracking using Two Arrays[J]. Journal of System Simulation, 2003, 15(10): 1464-1466,1491.
[4] 石章松, 刘忠. 单站纯方位目标多模型卡尔曼滤波跟踪算法的研究[J]. 系统仿真学报, 2006, 18(7): 1802-1805, 1814.Shi Zhang-song, Liu Zhong. Study on Single Platform Bearings-only Target Tracking Algorithm of Multiple Mo- del Kalman Filters[J]. Journal of System Simulation, 2006, 18(7): 1802-1805, 1814.
[5] 曲毅, 刘忠, 屈津竹. 基于时延的水中目标纯方位跟踪算法[J]. 系统工程与电子技术, 2007, 29(1): 107-109.Qu Yi, Liu Zhong, Qu Jin-zhu.Research on Underwater Bearings-only Target Tracking Algorithm Based on Time-delay[J]. Systems Engineering and Electronics, 2007, 29(1): 107-109.
[6] 刘伟, 王昌明, 赵辉. 基于卡尔曼滤波的水下近距目标运动分析[J]. 弹道学报, 2008, 20(4): 28-31.Liu Wei, Wang Chang-ming, Zhao Hui. Target Motion Analysis of Underwater Short-distance Target Based on Kalman Filter[J].Journal of Ballistics, 2008, 20(4): 28-31.
[7] 吴盘龙, 孔建寿. 基于平方根UKF的水下纯方位目标跟踪[J]. 南京理工大学学报(自然科学版), 2009, 33(6): 751-755. Wu Pan-long, Kong Jian-shou. Underwater Beaing-only Target Tracking Based on Square-root UKF[J]. Journal of Nanjing University of Science and Technology (Natural Science), 2009, 33(6): 751-755.
[8] 严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005.
Modeling and Simulation of Target Tracking for Underwater Acoustic Homing Weapon
YANG Xiang-feng, YANG Yun-chuan, CHEN Ya-lin
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
Target tracking is one of the important directions in the development of modern intellectualized underwater acoustic homing weapon. However, the observation-base is moving and the observation is time-varying when an active acoustic homing weapon tracks a target. In this study, the parameters of location and attitude from the acoustic homing weapon′s navigation system and the target information detected by the acoustic homing weapon are used to resolve the problem of observation-base movement and time-varying observation. The target coordinates in acoustic homing weapon coordinate systems are transformed to terrestrial coordinate system to resolve the problem of observation-base′s movement, and the sampling time is calculated in real time to resolve the problem of observation′s time-varying. A target tracking model of acoustic homing weapon based on Kalman filter is established. The choosing of filter′s initialization values is analyzed, and the application method of choosing filter initialization values is presented. Simulation results show that the model is accurate, and the tracking algorithm is of faster convergence and better tracking effect.
underwater acoustic homing weapon; target tracking; observation-base movement; time-varying observation; Kalman filter
TJ630.34; TB566
A
1673-1948(2013)01-0015-05
2012-06-15;
2012-07-23.
杨向锋(1978-), 男, 硕士, 高级工程师, 研究方向为水声信号与信息处理, 水下目标识别, 跟踪及水声反对抗.
(责任编辑: 杨力军)
