基于激光测距技术的复杂边坡角测量方法*
2013-05-14许晓晨
许晓晨 李 鑫 崔 清 陈 曦
(1.徐州市计量检定测试中心,徐州221002;2.中国矿业大学 矿业工程学院,徐州 221116)
0 引言
边坡是自然界中广泛存在的一种岩土结构体,是岩体、土体在自然重力作用或人为作用而形成一定倾斜度的临空面。按成因边坡可分为人工边坡和自然边坡,按地层岩性可分为土质边坡和岩质边坡,按岩层结构可分为层状结构边坡、块状结构边坡和网状结构边坡;按岩层倾向与坡向的关系可分为顺向边坡、反向边坡和直立边坡。人工堆筑的小型边坡,形状一般较为规则,边坡角度易于获取;对于自然形成的边坡,由于长期经受风化等因素的影响,坡面起伏变化,不能够采用传统的设备对边坡角度进行准确的测量[1];人工开挖形成的高大边坡,如露天矿边坡,坡面是大量碎裂岩体,人员无法接近,更不能获取准确的角度。目前,现场施工对于边坡角度的要求越来越高,能否准确的测量边坡角度[2],将是保证工程质量的关键因素。
1 激光测距技术
激光测距仪是利用激光对目标的距离进行准确测定(又称激光测距)的仪器。激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离[3]。若激光是连续发射的,测程可达40km左右,并可昼夜进行作业。若激光是脉冲发射的,一般绝对精度较低,但用于远距离测量,可以达到很好的相对精度[4]。
激光测距是光波测距方式中的一种,如果光以速度c在空气中传播在A、B两点间往返一次所需时间为t,则A、B两点间距离D为
D=c·t/2
(1)
式中,c为光在大气中传播的速度;t为光往返A、B一次所需的时间。
凭借激光测距技术,可以实现对较大距离的非接触测量[5],能够很好的适应复杂的作业条件,并保证测量结果的准确性[6]。
2 激光测距与边坡角度测量
复杂边坡的表面结构多变,难以采用传统测量工具进行实地准确测定,为了克服直接测量的限制,需要转换思路采用间接测量的方法获取边坡角度[7]。基于端帮激光测距技术的相关特性,可以实现对复杂边坡表面特征点相对距离的非接触测量,得到两个与边坡角度相关的距离之后,进一步测出激光测距设备的仰角,便可计算复杂边坡的实际角度[8]。
在边坡附近的平整地表,调平测角设备,借助激光测距仪,测定设备到边坡破底线的水平距离Li,根据垂直距离最短的基本定理,确定激光测距仪与边坡走向垂直,保证角度测量结果的精确度,然后,测定观测点与边坡坡底线之间的水平距离L1,在竖直方向转动激光测距设备,使观测点停留在边坡坡顶线位置,测出该点与坡顶线的位置为L2,两次观测状态,激光测距设备旋转过的角度为α,基于这三个参数,对边坡角(这里是β)进行计算,按照三角函数的基本原理进行处理,具体见图1。
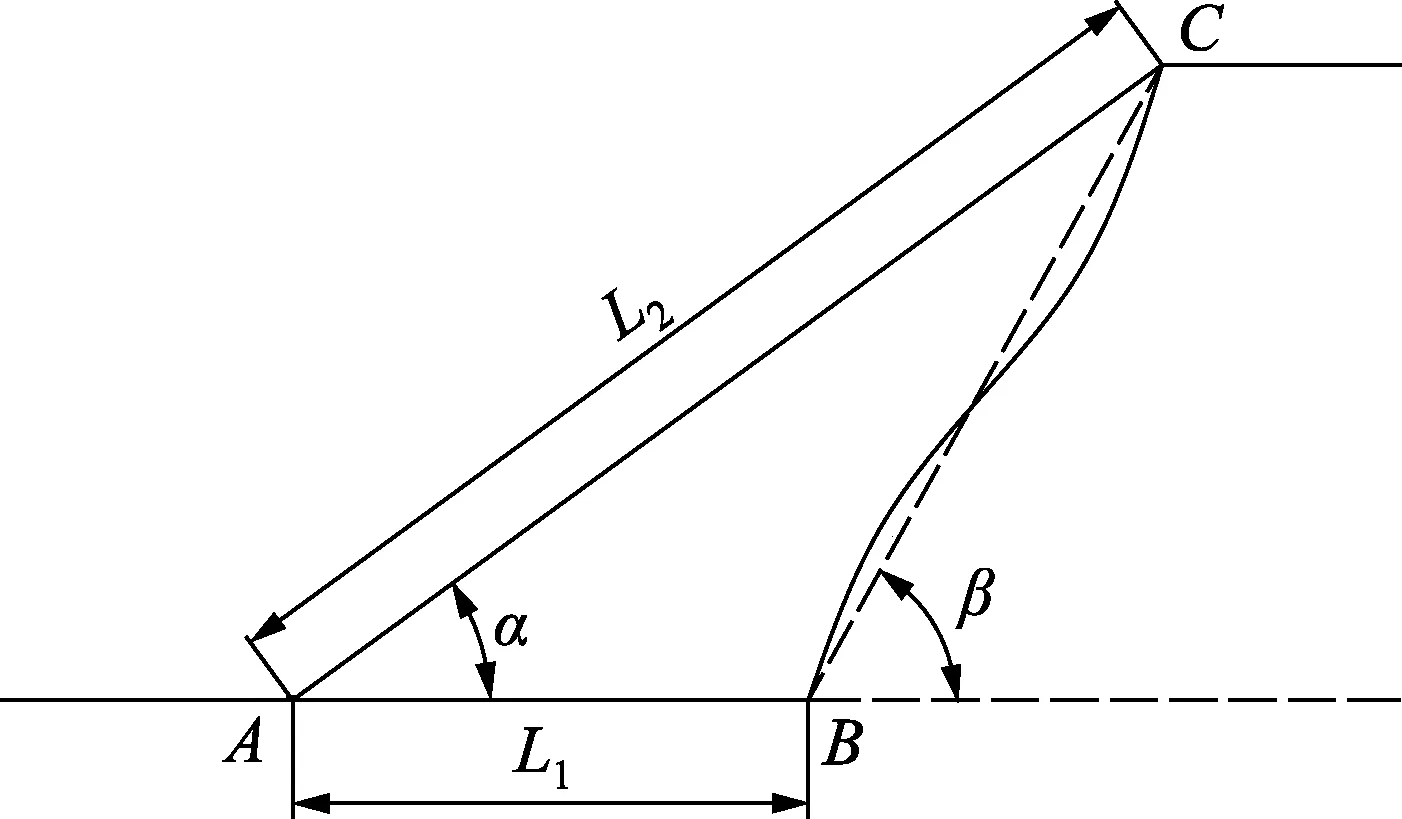
图1 复杂边坡角度测量原理
从图1可以直观的看出实验测定的参数L1、L2和α,需要计算的参数为β,跟据三角函数的相关原理进行推算,对于三角形ABC(见图2),根据正弦定理有
(2)
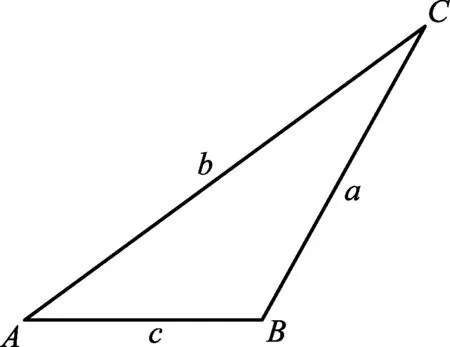
图2 基本三角形
式中,A为角A的对边长度;b为角B的对边长度;c为角C的对边长度。
利用△ABC求出角B的大小,其补角即为边坡的角度β。按照余弦定理,已知三角形的两条边长及两条边的夹角,计算第三条边长的公式为
(3)
式中各元素的含义与式(2)中相同。
借助测得数据,按照公式(3)计算出角A的对边长度a,然后根据正弦定理便可以推导出角B正弦值为
(4)
通过以上推导便得到了边坡角基于实测数据的计算方法,由于互补角的正弦值相同,因此,β的计算公式为
(5)
一般情况下,β的取值范围是0~90°,一般边坡角度都是锐角,当遇到特殊情况时,可结合实际情况选取正确的取值范围。
在不宜接近测量或被阻挡等复杂情况下,考虑在AB边不水平的状况下进行测量,这时AB边与水平面成仰角(图3a)或倾角(图3b)状态,相应的边坡角测量结果应在计算值β上加上或减去AB边的仰角或倾角θ。
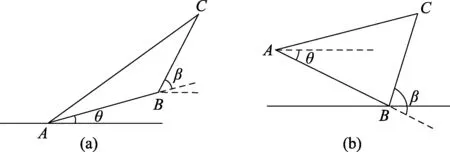
图3 仰角和倾角状态下测量
在激光测距仪的测量方向上不断调整设备与边坡破底线的水平距离L1,并进行多组边坡角测定,获得多个测定结果,并根据实测数据进行方差计算和误差修正,提高测量结果的准确度。
3 实例验证
为了检验基于激光测距技术在测量复杂边坡角度时的可靠性,特选择一个露天矿一个高大边坡(见图4)进行实地测量。

图4 露天矿复杂边坡
该边坡高度为20m,完全由松散岩体组成,人员无法靠近进行实地测量,只能采用非接触测角方法进行测量。在边坡下部平盘上,将激光测距仪水平放置好,并调整激光的照射方向,使其与边坡走向垂直。首先测得距离边坡坡底线的水平距离L1为20m,在竖直方向转动激光测距仪至观测点停留在坡顶线,测得此时的距离L2为48.9m,同时测量激光测距仪转动的角度α为24°,将参数带入公式(5)进行计算,得到边坡角β为
=38.5°
在不同的水平距离条件下,测定的边坡角度见表1。

表1 不同水平距离时边坡角测定结果
根据表1计算得到测试结果的平均值为38.5°,方差为0.24,测试结果的稳定度较好,精度符合要求,因此,非接触测量并计算得到该边坡的边坡角为38.5°。露天矿生产技术部门根据GPS定位坡顶线和坡底线坐标,并结合边坡高度,测绘得到该边坡的角度为38.7°,二者误差为0.52%。由此可以看出,基于激光测距技术反演边坡角度的测量方法精确度较高,能满足现场作业的技术要求,故认为该方法准确可靠。整套装备的基本元件廉价易得,制作和使用成本远远低于业内其他设备,因此,从技术上可行、经济上合理。
4 实际应用中需要考虑的影响因素
考虑到实际现场复杂性,应考虑可能造成测量误差的影响因素。
1)测量平面不垂直
考虑到实际的测量平台不一定能达到理想的测量要求,测量设备配备了水平调整装置,来保证测量平面与水平面的垂直。
2)被测量坡面与测量面的不垂直
如果被测量坡面与测量面不垂直,会造成测量结果偏小,一般情况下,通过最短距离确定测量点;复杂情况下,也可以通过测量左右两侧的两点,计算出测量点的位置。
5 结论
1)复杂边坡角度难以直接测量一直是公路和露天矿作业水平的影响因素,结合此类边坡的实际特点,提出采用非接触的边坡角度测量方法,并充分利用激光测距技术获取距离及角度等信息。
2)利用三角函数的正弦和余弦公式,结合边坡角度的定义及测量得到的L1、L2和α推导出了不规则边坡的边坡角度计算公式。
3)将该方法应用到露天矿松散不规则边坡的角度测量上,得到边坡的角度为38.5°,与实际角度的误差仅有0.2°,精确度可以接受,而且该方法的精确度会随着激光测距技术精确度的提高而进一步提高。
参考文献
[1] 陶卫,浦昭邦,孙运武. 角度测量技术的发展[J].激光杂志,2002,23(2):5-7
[2] 白福忠,包晓艳,李义军.角度的图像测量法[J].计量学报,2007,28(4):314-316
[3] 林华. PSD及其在非接触测量中的应用[J].激光技术,1998,22(1):52-54
[4] 高媛,郭丽莎. 激光干涉仪测角系统的精度补偿方法[J]. 计量技术,2003(1):32-33
[5] 程继伟,巩马理,刘兴占,等.两种二维激光扫描器摆角测量方法的比较和实现[J].激光与红外,2002,32(4):237-239
[6] 高媛. 双频激光测量系统精度分析.计量技术,2002(9):19-20.
[7] 于冀平,郭继平. 动态角测量方法研究进展[J].中国测试,2012,38(3):27-30.
[8] 李锐,张宁. 一种新型的经纬仪测角示值误差检定方法[J]. 计量技术,2003(8):44-46