电动助力转向系统建模及控制策略研究
2013-05-08梁继辉张晓川
梁继辉,张晓川
(沈阳理工大学 汽车与交通学院,辽宁 沈阳 110159)
电动助力转向系统(EPS)是一个比较复杂的非线性随动系统,与液压助力系统及电控液压助力系统相比具有明显的环保、节能及容易实现精确控制等优点,受到越来越多的关注。目前,国内外学者对EPS控制策略的研究主要集中在转向轻便性、系统稳定性等方面[1-2],但对 EPS动态控制效果和路感的研究还比较少。在EPS系统中,由于电动机和减速机构的摩擦、阻尼和惯性的存在,增加了转向系统的摩擦、阻尼和惯性,导致转向系统的动态转向效果变差和路感的下降。因此必须采取合适的控制策略,在解决转向轻便性和稳定性问题的基础上,进一步优化动态转向效果和路感。本文利用Matlab/Simulink,建立了系统仿真模型,实现EPS的轻便性,为电动助力转向系统的研究提供理论依据。
1 电动助力转向系统的工作原理
电动助力转向系统结构简图如图1所示。当驾驶员操纵转向盘时,扭矩传感器输出电压信号,并将电压信号传给控制器(ECU),同时,车速信号也传给ECU,ECU结合其内部的助力特性曲线,确定助力扭矩的大小和方向,ECU系统发出指令,控制电动机的电流大小及方向,调整电动机助力力矩的大小和方向。

图1 电动助力转向系统结构简图
2 电动助力转向系统的动力学模型
2.1 转向系统等效方程
EPS系统由很多具有阻尼和弹性特性的质量元件或惯量元件组成,在进行系统建模时,考虑到系统的基本特性是由低频元件决定的,仿真的目的主要是对助力特性和控制策略进行验证,建模时将机械转向系统进行了适当的简化,根据牛顿定理,转向系统各部分动力学方程为

2.2 电动机数学模型
将电动机进行适当简化后,电动机的数学模型如下[3]

式(1~6)中:Jc为转向盘、转向轴等效转动惯量;Jm为电动机轴转动惯量;Bc为转向轴阻尼系数;θc为转向盘转角;θm为电动机转角;Td为转向盘输入转矩;Ts为转矩传感器检测转矩;Tm为电动机电磁转矩;Tfc为转向轴库仑摩擦转矩;Ff为齿条库仑摩擦力;Tfm为电动机轴库仑摩擦转矩;Kc为转矩传感器扭杆刚度;Br为齿条阻尼系数;Rp为小齿轮半径;Mr为齿条和车轮等效质量;p为齿条位移;Kr为弹簧刚度;Kf为电动机反电势系数;Kt为电动机转矩系数;R为电动机电枢电阻;L为电动机电感;u为电动机控制电压;Km为电动机轴扭转刚度;G为电动机减速机构减速比;i为电动机电枢电流;Bm为电动机轴阻尼系数。
3 助力特性曲线
电动助力转向系统的助力特性曲线主要包括直线型、曲线型、折线型三种。本文研究直线型助力特性曲线,图2说明了不同车速下助力力矩与转向盘输入力矩的理想关系。不同车速下该曲线都分为三个区,0≤Td<Td0为助力死区,Td0≤Td<Tdmax为助力变化区,Tdmax<Td为助力饱和区。其中Td为转向盘力矩,Td0为电机开始助力时方向盘力矩,Tdmax为电机助力最大时转向盘力矩。随着车速升高,助力力矩逐渐减小,零车速时最大助力值为27N·m,最大车速时助力最大值为4N·m[4-5]。

图2 直线型助力特性曲线
4 电动助力系统的仿真与分析
4.1 电动助力系统的仿真模型
本文结合助力特性曲线,利用Matlab/Simu-link建立电动助力系统仿真模型,如图3所示。汽车车速和转向盘转矩为系统模型输入量。电动助力转向系统的主要参数取值如下:


4.2 控制模型的电流仿真结果
当车速信号分别为 0km/h、25km/h、50km/h、80km/h时,转向盘扭矩信号为正弦信号时,目标电流、实际电流及目标电流与实际电流的差值曲线如图4所示。

图3 电动助力转向系统仿真模型

图4 目标电流和实际电流
4.3 仿真控制模型的评价
电动助力转向系统要求低速时轻便性和高速时路感性。“路感”是驾驶员在转向时通过转向盘获得对路面状况和阻力变化的感觉,汽车高速行驶时,路感是必不可少的,路感强度的定义为

式中,K1为摩擦阻力对路感的影响系数,Tw为转向负载。
电动助力转向系统仿真参数不变,不同车速下转向盘扭矩和转向负载扭矩曲线如图5所示。
4.4 仿真分析
本文的PID闭环控制策略能够很好消除由于电机、减速机构的转动惯量及阻尼等因素对系统动态稳定性造成的影响。由图4可以看出,目标电流与实际电流数据基本吻合,不同车速下目标电流与实际电流之差在0.1A以内,说明EPS系统具有较好的动态跟随助力性能。曲线整体呈正弦趋势变化,电流在零点处出现一微小助力死区区间,与实际情况一致。随着车速的增加,目标电流及实际电流均逐渐减小,其中当车速为0km/h时,最大助力电流为26.5A,当车速为80km/h时,最大助力电流为5.8A。
由图5可以看出,随着车速的增加,输入力矩增加单位值时,相应的负载转矩变化幅度逐渐减小,其中当车速为0km/h时,转向负载为33.2N·m;车速为80km/h时,转向负载为13.2N·m,路感强度逐渐增加,符合高速路感加强的要求。说明EPS系统能很好地实现转向系统低速时轻便性和高速时路感性。实际应用中当汽车低速行驶时,伺服电机以大电流、高转矩方式,产生较大的助力力矩,使得驾驶员转向轻便;当汽车高速行驶时,伺服电机以小电流、低转矩方式,产生小的助力力矩,保证汽车高速行驶的稳定性。仿真结果与实际情况相吻合。同时随着车速度增加,转向盘转矩增加,驾驶员路感增强[6-8]。
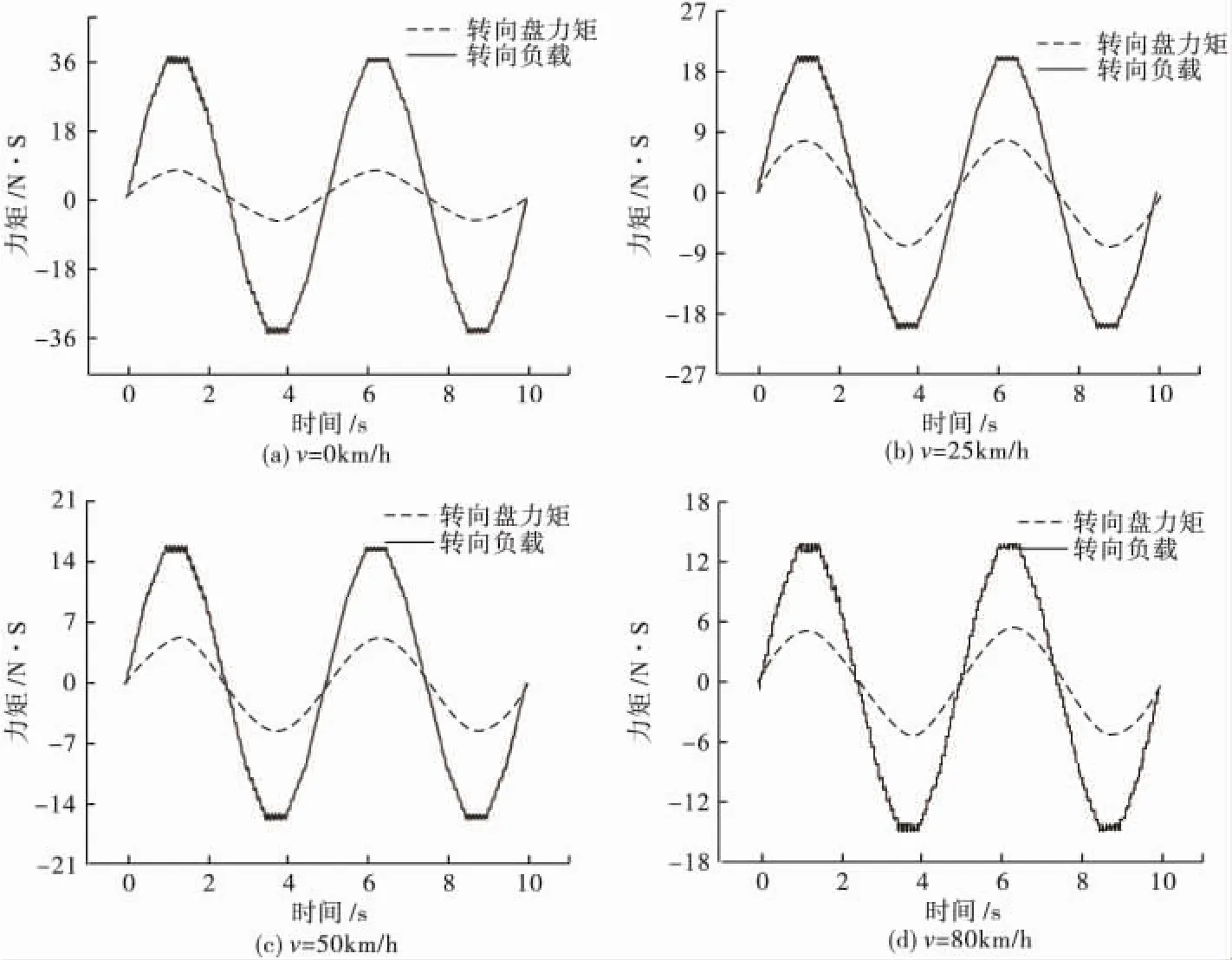
图5 转向负载和转向盘扭矩
5 结论
分析了EPS系统的动力学特性,建立了系统主要机构的动力学模型,通过直线助力特性,基于Matlab/Simulink构建了系统仿真模型,通过PID控制器跟踪控制电动机的实际电流,对比实际电流与目标电流的差值对实际电流进行闭环控制,使EPS系统具有较好的动态跟随助力效果。对比不同车速下转向负载和转向盘扭矩,分析了汽车转向的动态稳定性和路感,得到更加符合实际的电动助力系统,为以后系统的开发奠定了较好的基础。
[1]何字满,顾梦妍.基于MATLAB/Simulink的电动助力转向系统控制算法仿真研究[J].传动技术,2011,25(4):33-37.
[2]申荣卫,林逸,台晓虹,等.电动助力转向系统建模与补偿控制策略[J].农业机械学报,2007,38(7):5 -9.
[3]LIAO Y G,DU H I.Modeling and analysis of electric power steering system and its effect on vehicle dynamic behaviour[J].Vehicle Autonomous Systems,2003,l(2):l53 -16l.
[4]王德平,郭孔辉,宗长富.车辆动力学稳定性控制的理论研究[J].汽车工程,2000,22(1):7 -9.
[5]施淑洪,郑荣良.电动助力转向系统及系统模型分析[J].江苏大学学报(自然科学版),2002,23(5):57-60.
[6]贾和平,钟绍华.电动助力转向系统助力特性的仿真分析[J].专用汽车,2006(10):36 -40.
[7]Ji Hoon Kim,Jae Bok Song.Control logic for an Electric Power Steering System Using Assist Motor[J].Mechatronics,2003,12(3):447 -459.
[8]林逸,施国标,邹常丰,等.电动助力转向助力控制策略的研究[J].汽车技术,2003(3):8-10.
