万马力级深水三用工作船动力定位性能研究
2013-05-07谢家纯
谢 家 纯
(上海船舶研究设计院,上海 201203)
0 引 言
船舶动力定位(DP)技术是指船舶在水中不借助于锚泊系统的作用,而通过控制推进器的推力大小及方向来克服风、浪和流的影响,致使船舶保持在某个固定的位置及船首艏向,或跟踪预定的航迹和目标,以满足特定工作任务需要的一种可自动化操作的综合性技术。其概念的形成,可以追溯到上世纪50年代末的美国“莫霍深钻计划”,将船舶动力定位在约4500m水深的大洋,对大洋底部进行钻井(取样)。经过几十年的发展,船舶动力定位技术已经有了很多改进并日臻成熟,“绿色、环保和节能”也已被引入到当前船舶动力定位技术的发展中。目前,以Kongsberg、Converteam、Navis、Nautronix等为代表的国际知名品牌的船舶动力定位产品,已被广泛应用于多种海上作业,如海洋勘探、海上油气开发、军事相关用途等。
1 研究背景及目的
受陆上石油勘探开采难度的日益增加,以及陆地油气资源总量日益减少的影响,开发海洋油气资源已成为各国石油战略的重要举措之一。可以认为海洋油气资源必将成为 21世纪人类重要的能源后备库。联合国海洋法公约的生效(1994年),各国划出200海里专属经济区,必将使深海区域的油气资源的勘探开发成为各国竞相优先发展的战略,必将加速海洋工程装备向深海进军的步伐。
深海油气资源的勘探开发,需要有先进的海洋工程技术和装备作为支撑。在此背景下,国家工信部、财政部于2009年12月7日联合批准确立了“万马力级深水三用工作船(以下简称工作船)自主研发”等6个高技术船舶的科研项目。工作船自主研发的目的在于,适应我国深海油气勘探开发工程的发展需求,研制具有当代国际先进技术水平的优秀船型,为深水海洋油气工程开发提供新型深水三用工作船,缩短与国际水平的差距,发展和提升我国深水海洋油气勘探开发工程的综合能力。当前,船舶动力定位技术正作为其中一项重要的海洋工程关键技术,为工作船在深水海域的作业,尤其是定位作业提供了可能,极大地方便了定位操作并能避免锚泊系统对海床作业面的破坏影响。
本文根据工作船的功能和特点,对其DP作业环境条件进行研究界定,结合该船的动力装置和电站的配置,着重分析和研究在不同作业工况下的动力定位能力,进而论证该船具有在我国深水海域进行动力定位作业的能力。
2 基本概况及其动力定位
工作船是一型为深海石油和天然气勘探开采平台、工程建筑设施等提供多种作业和服务的多功能深水作业三用工作船(参见图1),主要提供抛起锚、拖航、供应和值班守护等服务,并对水下工程设备安装作业提供支持和服务等。该船航行于无限航区,满足3000m以上水深作业要求,抗风能力达到12级。

图1 工作船效果图
工作船的主要参数如表1所示。

表1 工作船主要参数 m
工作船在为海上钻井平台供应物资作业时首先需要定位,而该船的定位不能借助于平台来系泊,且考虑到深水锚泊定位操作的不便性:需要其他拖船和起抛锚船协同作业、定位缓慢、对天气变化的反应缓慢、对海床作业面的破坏、与平台或其他船只锚泊缆绳交叉缠绕等因素,故选择应用已经相对成熟的动力定位技术。考虑向平台供应物资时的安全性,该船动力定位系统需要进行冗余设计。在权衡冗余度和经济性要求后,确定动力定位装备等级[1]为DP2。
3 动力推进器及其供配电
该船主推进采用“双主柴油机+双推进电动机”的柴电混合推进形式,并配备双固定导管可调螺距桨(CPP)的主推进系统,配以双流线型悬挂式襟翼舵。主齿轮箱为二进一出轴齿轮箱,每台主机(8000kW)通过主齿轮箱驱动一只固定导管 CPP螺旋桨;每台推进电动机(3000kW),也可通过主齿轮箱驱动这只固定导管CPP螺旋桨;当然主机和推进电动机也可通过主齿轮箱联合驱动固定导管CPP螺旋桨,实施船舶推进。
该船在船首部设2台管状侧向推进器。每台侧向推进器功率为1000kW,侧向推力为160kN,由电动机驱动可调螺距4叶桨。在船首另外设有一台艏升降式(或折叠式)全回转舵桨装置,功率为1200kW,全回转推力为 210kN。在艉部设一台电动机驱动可调螺距 4叶桨管状侧向推进器,侧向推进器功率为1000kW,侧向推力为160kN。同时还设有一台艉升降式(或折叠式)全回转舵桨装置,功率为1200kW,全回转推力为210kN。
在船尾左、右导管螺旋桨的后方各设置一只流线型悬挂式襟翼舵,每只舵面积16.2m2,总面积约5.0%LT(L——船体长度,T——载重线吃水),转舵角±45°,襟翼角±55°,各配电动液压转翼式舵机一台,每台舵机最大扭矩为560kN·m。
为提高该船动力推进器的冗余度,即相对提高动力定位能力,有关推进器的供配电采用多段(汇流排)方案冗余设计。其供配电方案设计,参见图2。主电站由轴带发电机(3800kW×2台)和辅发电机(2600kW×3台+1000kW×1台)组成。在动力定位作业时,如4台辅发电机和2台轴带发电机全部运行时,配电板必须划分为独立的4段。
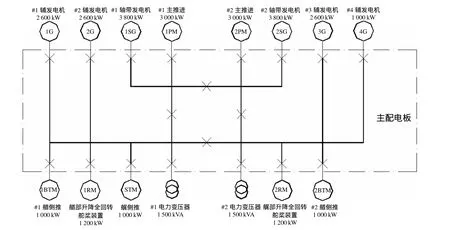
图2 工作船动力推进器供配电单线图
4 动力定位作业环境
一般来说,深水远海相对近海或浅海对工程船的作业要求在各方面都更高,其中当然也包括对船舶进行动力定位作业的要求。工作船从其自主研发的目的看,当前还是以服务我国领海海域内深水油气资源勘探开发为前提,所以需要对我国深水油气资源勘探开发海域进行调查研究,拟重点针对我国南海海域,尤其是其深水海域的环境特点来分析、研究并确定对该船进行动力定位作业要求最高的相应环境条件。
南海是西北太平洋最大的一个半封闭边缘海,其范围大约为北纬 0°~23°,东经 99°~121°,面积约为350万平方公里,平均水深1800m,最大水深5420m。南海地处亚热带和热带区域,属于典型的亚洲季风区。南海海域气候具有“冬半年、夏半年”的特征,春秋过渡季节很短。南海海面风力在冬季风(东北季风)时期最强,在夏季风(西南季风)时期较冬季风时期弱。根据有关资料[2],将南海分成北区(18°N以北)、中区(18°-10°N)、南区(10°N以南)和北部湾区总计4个海区,来分析各区的东北季风和西南季风的特征,参见表2和表3。此外,南海北区的南部到中区海域为较深水域,水深大都在3000m以上。

表2 南海各区东北季风特征

表3 南海各区西南季风特征
南海海浪的分布和变化主要取决于海区季风风场的分布和变化,东北季风时期盛行东北浪,西南季风时期盛行南、西南浪。南海海浪在两种季风交替时期,浪向多变并且浪向不明显。由于南海东北季风的风速较西南季风的风速大,所以就波高的绝对值而言,南海冬季的波高一般较夏季大。根据有关南海北区的资料,根据应用多年的资料算出的浪高算术平均值与用实测风速资料从蒲氏风级表中获得的浪高值相近的结论[2],在没有确切资料对南海其他各区的波浪高度进行相关计算的情况下,也可根据风速从蒲氏风级表中得到相应的可供参考的浪高值。
南海环流场受季风、地形、太阳辐射以及降雨等多种因素的影响复杂多变。冬季南海总的环流结构呈气旋型,并可生成两个次海盆尺度的气旋型环流。夏季南海总的环流结构呈反气旋型,大部分海区以东北向漂流为主。不论冬季、夏季,南海环流西部边界强化趋势均十分明显。由于南海海流存在上述复杂性,目前对南海海流特征尚无比较统一的认识。尽管如此,从中科院南海海洋研究所热带海洋环境动力学重点实验室和中海石油研究中心深水工程重点实验室联合进行的、对南海深水区风、浪、流多年一遇重现期极值的推算结果[3]可以看到:南海在500m以上水深的各海区的流速,以最长百年一遇的重现期来看,都在0.74m/s以下,并且随着水深的增加,流速皆相应降低。
通过上述分析研究,将工作船进行动力定位作业的环境条件设定为:蒲福氏7级风、6级巨浪海况、1/3有义波高4.0m、2级海流,此为对该型船有最高要求的南海深水区域的实际海况条件。
5 动力定位能力
根据工作船动力定位作业的环境条件,结合其自身配备的动力装置(推进器),分以下14个工况进行动力定位能力的相关研究,其中前10个工况基于正常使用要求,后4个工况是模拟可能出现的最大单点故障(WCFDI[4])情况,具体参见表4。表4中的“开启”代表正常在线运行,“关闭”代表正常使用时要求停机或故障带来的非在线状态。

表4 工作船动力定位作业工况
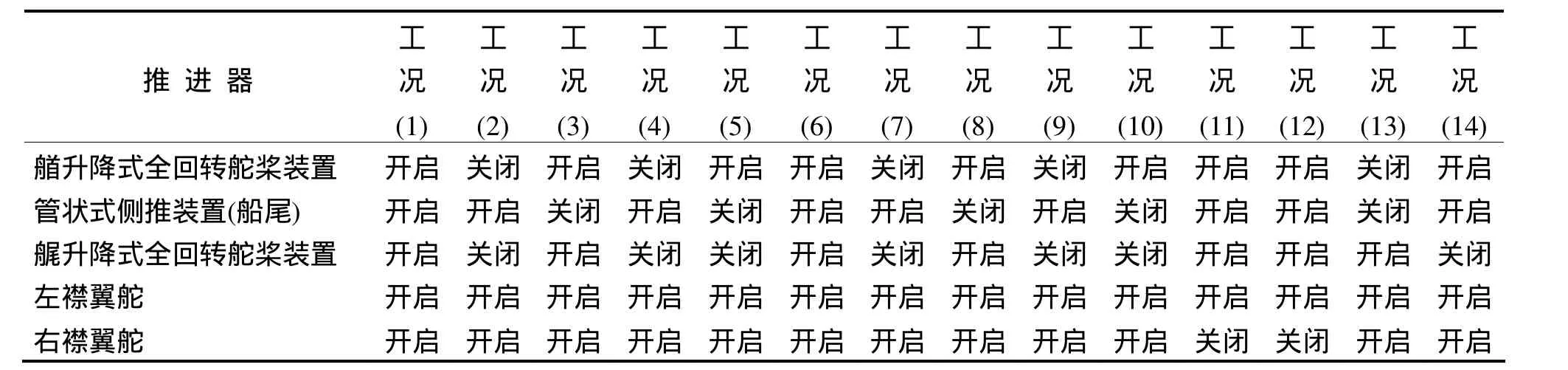
续表4
通过计算,所列14个工况的动力定位能力[5]如图3~16所示。
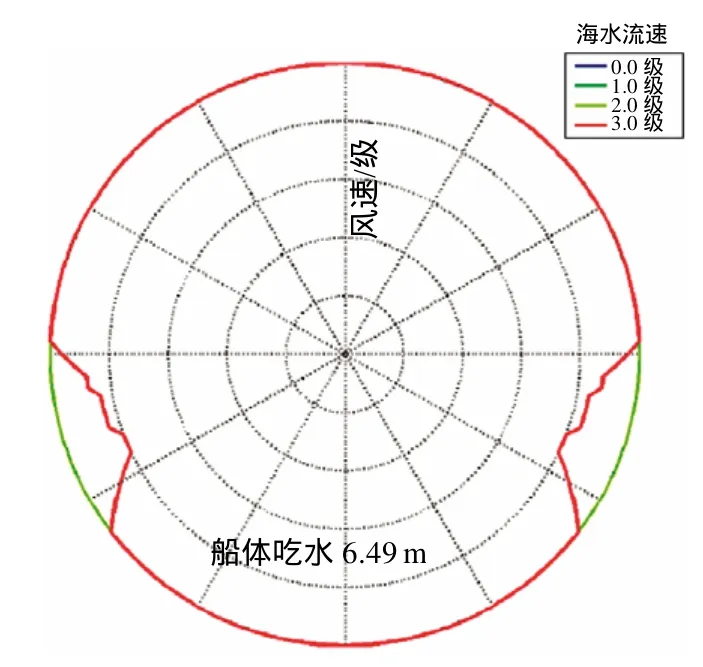
图3 工况1动力定位能力
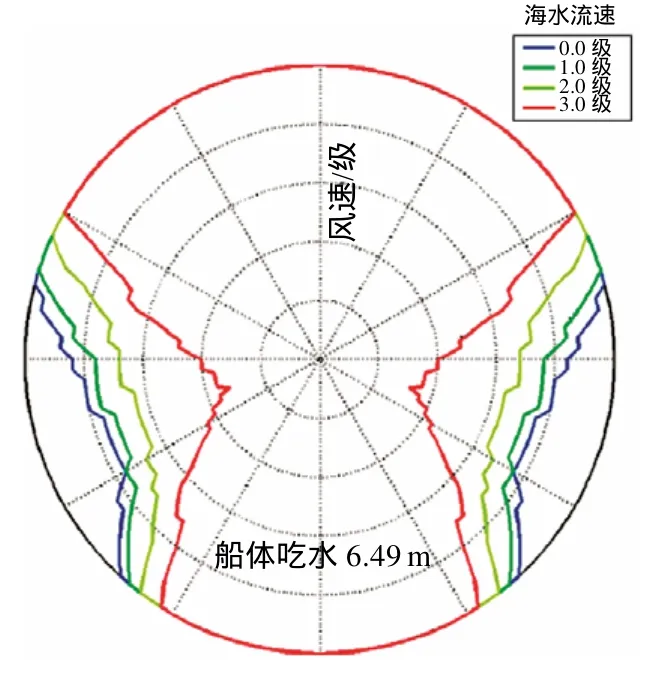
图4 工况2动力定位能力
图5 工况3动力定位能力
图6 工况4动力定位能力
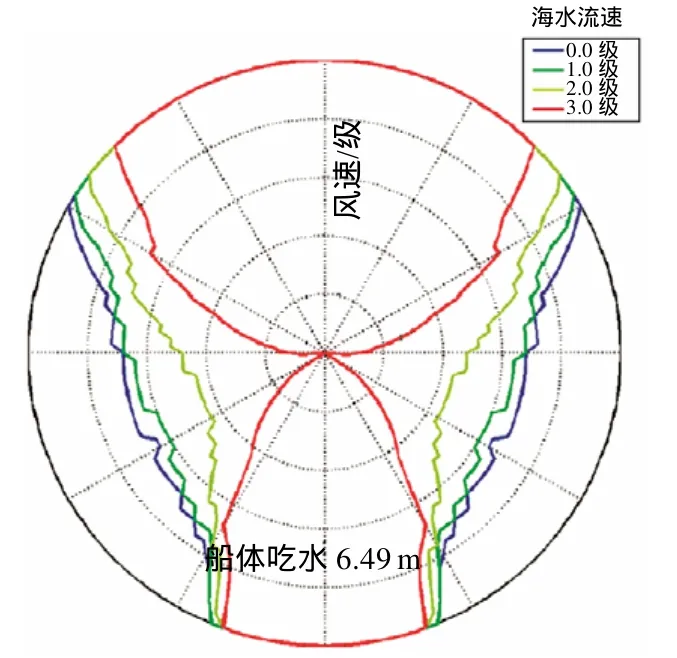
图7 工况5动力定位能力
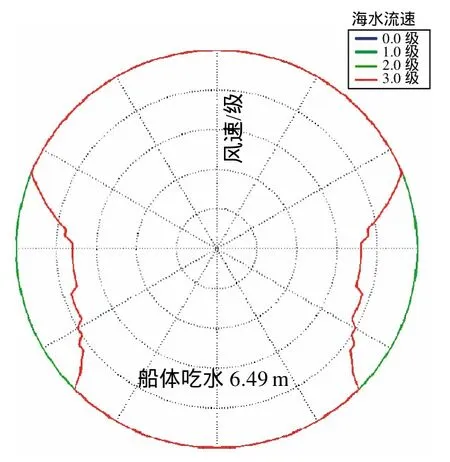
图8 工况6动力定位能力

图9 工况7动力定位能力

图10 工况8动力定位能力
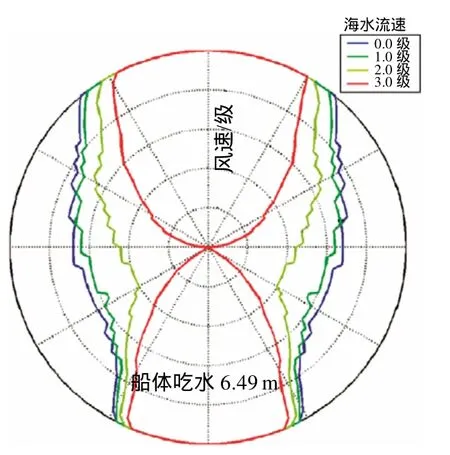
图11 工况9动力定位能力

图12 工况10动力定位能力

图13 工况11动力定位能力
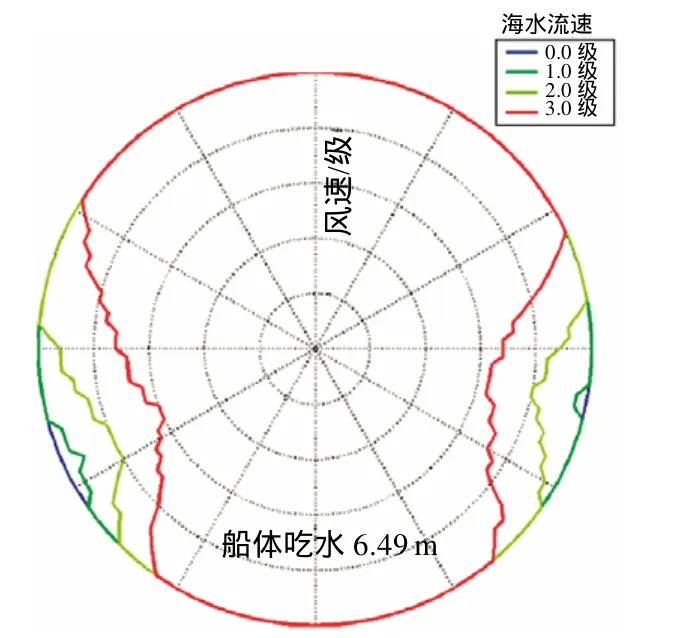
图14 工况12动力定位能力
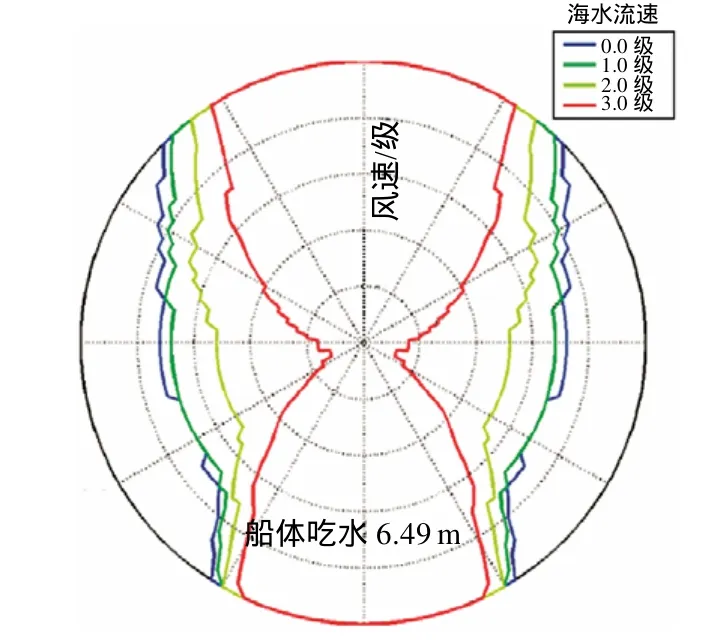
图15 工况13动力定位能力
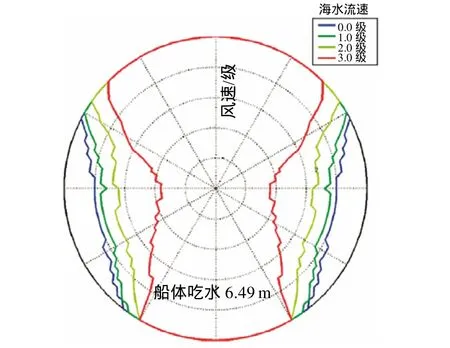
图16 工况14动力定位能力
对照南海深水作业环境条件(对应最高要求),从动力定位能力图中可以看出,该船在各工况下的动力定位作业能力,见表5。
此处定义风向角:以船体中心为基点,从船首方向吹来的风向角为0°,顺时针递增。
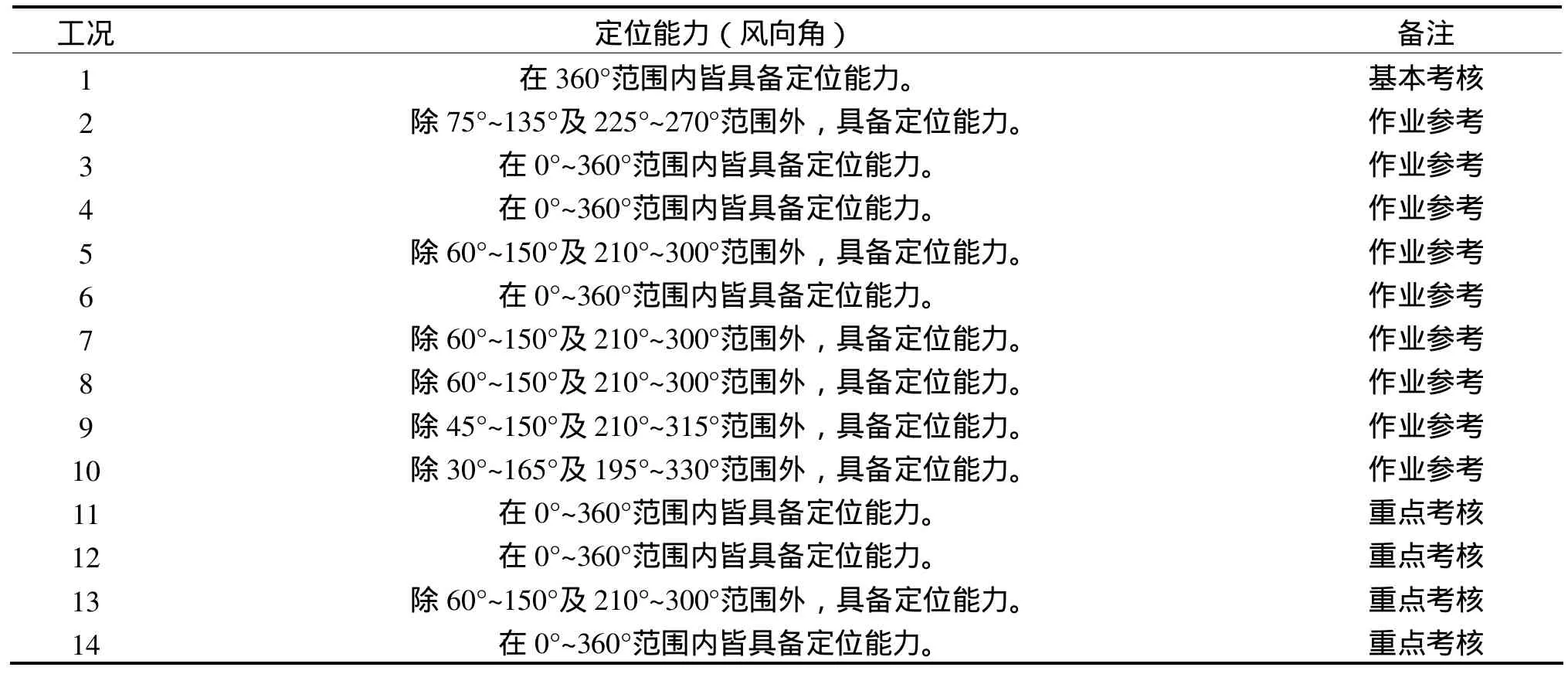
表5 工作船动力定位能力
如同上文所述,14项动力定位作业工况中的1~10是基于使用要求,相应定位能力分析结果供使用参考。工况11~14,则反映工作船在极端环境作业条件下、动力系统发生各种(最大)单点故障后,该船所具备的定位作业能力。其中工况11和12在0~360°风向角范围内还具备足够的定位作业能力(相对深水定位作业极端条件),而工况13和14,特别是工况13则在一定风向角范围内明显出现定位能力不够。对比工况13和14不难看出,前者出现明显的定位能力不够主要是因为失去了“艏部升降式全回转舵桨装置”。为此,在工作船的动力系统设计中,需要特别考虑为艏部升降式全回转舵桨装置增加一路动力电源供给,即从主配电板的另一段(对称段)汇流排提供一路动力电源作为备用,供主供电汇流排发生故障情况下切换使用,以保障该船在深水极端条件下,即使发生各种(最大)单点故障,仍具备作业要求的动力定位能力。通过新近完成的水池模型试验也表明,在工况 13中增加艏部升降式全回转舵桨装置的作用,确实保证了在90°最大环境载荷下,该船具备稳定的定位能力。
6 结 语
本文基于工作船自主研发要求,进行有关船舶动力定位性能的专题研究,并对该船在我国深水海域(南海)动力定位作业环境条件进行分析研究和界定。根据该船及其配备的动力装置,计算并分析研究在多种工况下的定位作业能力。研究结果表明,该船满足在我国深水海域进行动力定位作业要求,具备相应能力。
回顾工作船自主研发中有关动力定位的研究过程,发现还有一些问题可做进一步的研究与探讨:一是动力定位的时域模拟。二是分析研究各推进器之间及推进器与船体之间水动力的相互干扰。三是研究动力定位系统与锚泊系统的联合定位。
致 谢
本文属于工信部和财政部联合立项的6个高技术船舶科研项目之一,万马力级深水三用工作船的专题研究之一,在成文过程中得到过项目组的大力支持,在此致谢。
[1] 缪燕华.动力定位工程船设计技术研究[J].上海造船,2010 (1): 46-50, 59.
[2] 南海北部的风、浪、流[Z].地质部南海地质调查指挥部综合研究大队.广州: 1981.
[3] 葛黎丽,屈 衍,张志旭,等.南海深水区风、浪、流多年一遇重现期极值的推算[J].中国海上油气,2009,21(3):207-210.
[4] The International Marine Contractors Association.A Guide to DP Electrical Power and Control Systems [M].IMCA M 206.2010.
[5] 吴斐文.关于动力定位国际组织和标准综述[J].上海造船,2010 (2): 69-71.