现代超级“螺”:“大狗”机器人
2013-04-29方菲刘焕松徐欣
方菲 刘焕松 徐欣


身负重物,在各种地形上奔跑、攀登、运载……美国国防高级研究计划局划时代的新型机器人“大狗”都能够做到。以其视频在“优酷”上超过1200万次的点击率,“大狗”无疑已经吸引世界眼球。
当今士兵为了满足作战需求,执行任务必须携带大量装备和电池,而徒步作战人员身上不断加重的携行负荷已成为现代士兵的一大负担。当携行物资质量超过45kg时,徒步士兵的作战能力会大大减退。“大狗”机器人则可默默地甘心为士兵负重,被称为军用机器人“骡”——
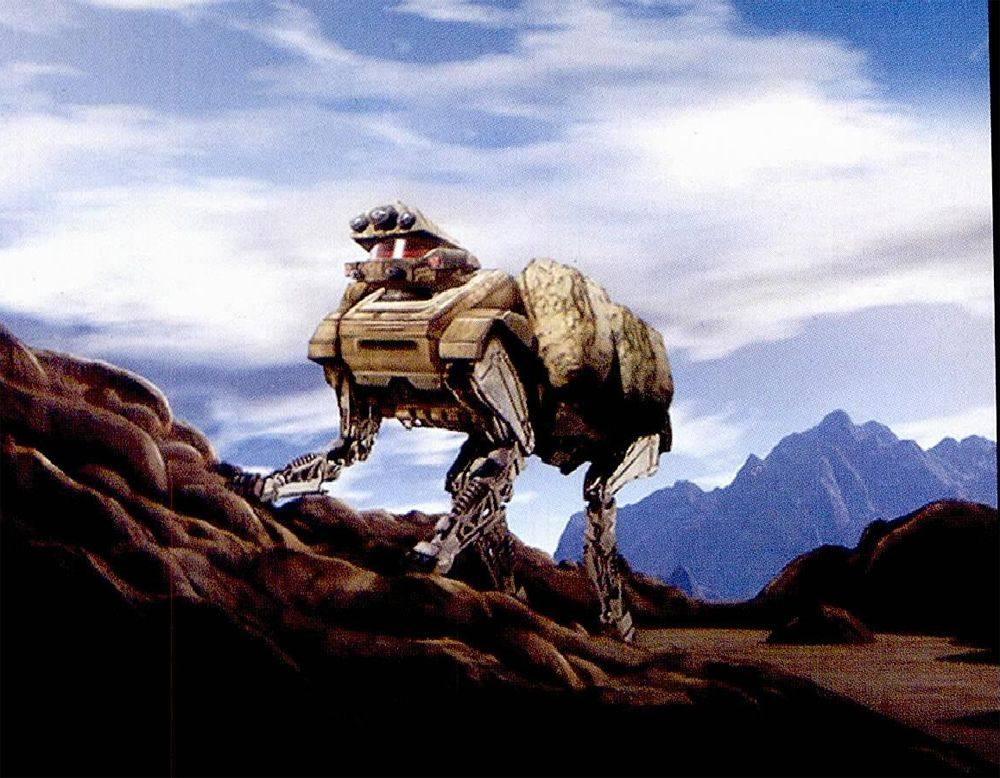
“大狗”机器人由波士顿动力公司研发。因其行动与狗相类似,所以被称作“大狗”,主要用途是在崎岖的地形上运载质量达154kg的负荷。当然,“大狗”在负荷之下还拥有许多高科技功能。
“大狗”的“眼睛”
为使“大狗”机器人能在它可能遇到的各种崎岖不平的环境中“行走”,其头部集成有立体摄像系统。立体摄像系统由喷气推进试验室提供,能够结合图像软件生成精确的三维地形模型。
三维地形模型可使机器人分辨出前方道路是否安全,可以使“大狗”计算出任何沟壑或洞穴的跨度以及是否可以安全地跳过。在试验室测试中,“大狗”满负荷可成功跳越1.1m的距离。
“大狗”机器人还能够通过记录并储存在自带计算机中的运动历史数据和测距法推算出崎岖地形的崎岖程度,同时还可以通过牵引力调节,使其在凹凸不平的地面上避免失脚滑倒,以及失脚滑倒后能够爬起来。
“大狗”如何“行走”
“大狗”机器人的行走模式通过四条腿来控制,每条腿配备4个为腿关节提供动力的低摩擦液压马达。在这些马达上安装了大约50个传感器,而行走动作最终由操纵这些传感器的机载计算机控制。这些传感器用于监测机身的姿态与加速,腿关节马达的运动和力度,以及发动机转速,机器人内置发动机的温度与液压。初级控制如关节的位置与力度控制,高级控制如移动过程中的速度与高度的控制,都通过机载计算机控制。
因此,“大狗”机器人能够展示多种移动方式与速度。通过控制它的四条腿,它能够站起、蹲下、爬行、小跑,甚至飞奔式地跳跃前进。“大狗”机器人在小跑时的平均速度为5.6km/h左右,跳跃前进的速度超过了11.2km/h。
为了模仿人类行走的速度,这种机器人采用一种动态平衡小跑步态,利用横向速度与加速度来保持平衡。多个惯性传感器及“大狗”机器人的控制系统测出各条腿的运动力量和地面反作用力来分配绦腿的负荷,以此来优化它的机动负载能力。
“大狗”:由“操作员控制单元”控制
“大狗”机器人的控制,由一名操作员使用“操作员控制单元”,通过无线网络电台向它发送指令。
“操作员控制单元”置于人员专用的负荷背心内,包括900MHz无线电广播天线、无线电台、行驶控制器接口,还有头戴式显示单元,都使用电池供电。
操作人员使用“操作员控制单元”向机器人发送行驶与速度指令,引导机器人按其指定路线行进。其他指令包括出发或停止、蹲下以及它能够执行的各种速度。视觉显示器用于显示操作数据。“大狗”机器人的自带控制系统则控制腿部动作与稳定性。
“大狗”的下一代:“阿尔法狗”
“大狗”机器人的继续发展演变促进了“步行班用支援系统”的开发,这一系统亦称“阿尔法狗”。波士顿动力公司已经设计出改进的同类机器人,它在性能和方便徒步士兵使用上均超出“大狗”机器人。
美国国防高级研究计划局一直在支持这一项目,最近对最新型“步行班用支援系统”进行首次室外演练,成功地展示出其包括在崎岖地形上行走的全部能力。
继这次成功演练之后,一项历时18个月的计划业已公布,定于2013年夏开始实施,这将见证国防高级研究计划局完成系统的综合开发,改进其关键功能,确保对徒步作战人员具有更大的实用价值。
“阿尔法狗”须验证它运载181kg负荷、24小时行走32km的能力,而它的“视觉”传感器也将要加以改进。
此外,美国国防高级研究计划局还将增加新功能:
其一,增强的“听觉”传感器正在研究中,使班组成员能够在喊出机器人听得懂的指令,包括蹲、坐、停、走之后,机器人能够处理并执行。
其二,美国国防高级研究计划局还希望将“阿尔法狗”用作远程辅助电源,使徒步士兵在长时间巡逻或者作战中能够用机器人的电源给其他设备充电。
国产四足机器人首次曝光:酷似美军“大狗”
近日,一组中国正在研制的四足机器人的照片引发广泛关注。这款机器人主要部件由4条修长的腿和一个圆柱体状的机身组成,看上去好像一只没有头的狗。单从外形上看,我国的这款机器人酷似美国研制的“大狗”机器人,最明显的是都采用了相同的四条腿设计,只是我国的这款机器人在尺寸上稍小一些。
让我们继续关注国内外四足机器人的发展动向。
编辑 刘兰芳